-
STM32物联网项目-双极性步进电机
双极性步进电机

双极性的意思是通过线圈的电流有两个方向
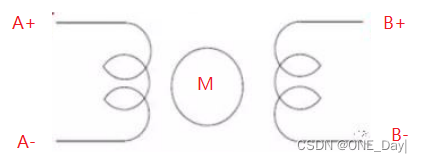
电流方向
A+ 流向 A-或者A- 流向 A+
B+ 流向 B-或者B- 流向 B+
驱动方式
与单极性的步进电机一样,有三种驱动方式,单四拍、双四拍、八拍
A+表示电流从A+流向A-,A-表示电流从A-流向A+
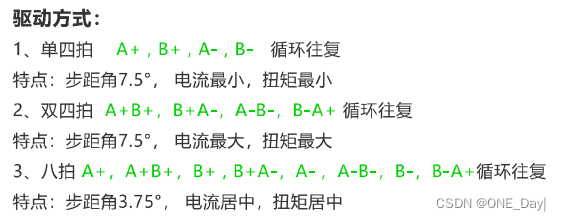
因为单四拍的步距角是7.5度,也就是说按A+,B+,A-,B-这样线圈通电顺序就可以让步进电机转动7.5度,又因为该步进电机没有减速比,所以360/7.5 = 48,48个这样的单四拍就可以让电机转动一圈,双四拍的同理
八拍步距角是3.75度,360/3.75 = 96,所以在八拍的驱动方式下,步进电机转一圈要96个这样的八拍脉冲
程序
与单极性步进电机的程序差不多,在驱动方式上和转一圈所需的脉冲数不同
一个四拍或八拍都是让线圈轮流通电,若脉冲是A+,就让A+引脚输出高电平,A-引脚输出低电平,这样电流就从A+流向了A-,驱动转子转动
A1 = A+,A2 = A-
/* * @name Step_One_Pulse * @brief 步进电机步进一个脉冲 * @param Speed_Change -> 速度变化 * @retval None */ static void Step_One_Pulse(void) { static uint8_t Position = 0; //单四拍 if(Bipolar_Step_Motor.Drive_Mode == Drive_Mode_Single_4_Beats) { if(Bipolar_Step_Motor.Direction == Forward_State) { //正向步进 A1 - B2 - A2 - B1 switch(Position) { case 0: SET_Motor_A1; CLR_Motor_B1; CLR_Motor_A2; CLR_Motor_B2; break; case 1: CLR_Motor_A1; CLR_Motor_B1; CLR_Motor_A2; SET_Motor_B2; break; case 2: CLR_Motor_A1; CLR_Motor_B1; SET_Motor_A2; CLR_Motor_B2; break; case 3: CLR_Motor_A1; SET_Motor_B1; CLR_Motor_A2; CLR_Motor_B2; break; default: System.Error_Handler(); } } else { //反向步进 A1 - B1 - A2 - B2 switch(Position) { case 0: SET_Motor_A1; CLR_Motor_B1; CLR_Motor_A2; CLR_Motor_B2; break; case 1: CLR_Motor_A1; SET_Motor_B1; CLR_Motor_A2; CLR_Motor_B2; break; case 2: CLR_Motor_A1; CLR_Motor_B1; SET_Motor_A2; CLR_Motor_B2; break; case 3: CLR_Motor_A1; CLR_Motor_B1; CLR_Motor_A2; SET_Motor_B2; break; default: System.Error_Handler(); } } //更新位置信息 if((++Position) == 4) Position = 0; } //双四拍 if(Bipolar_Step_Motor.Drive_Mode == Drive_Mode_Double_4_Beats) { if(Bipolar_Step_Motor.Direction == Forward_State) { //正向步进 A1B2 - B2A2 - A2B1 - B1A1 switch(Position) { case 0: SET_Motor_A1; CLR_Motor_B1; CLR_Motor_A2; SET_Motor_B2; break; case 1: CLR_Motor_A1; CLR_Motor_B1; SET_Motor_A2; SET_Motor_B2; break; case 2: CLR_Motor_A1; SET_Motor_B1; SET_Motor_A2; CLR_Motor_B2; break; case 3: SET_Motor_A1; SET_Motor_B1; CLR_Motor_A2; CLR_Motor_B2; break; default: System.Error_Handler(); } } else { //反向步进 A1B1 - B1A2 - A2B2 - B2A1 switch(Position) { case 0: SET_Motor_A1; SET_Motor_B1; CLR_Motor_A2; CLR_Motor_B2; break; case 1: CLR_Motor_A1; SET_Motor_B1; SET_Motor_A2; CLR_Motor_B2; break; case 2: CLR_Motor_A1; CLR_Motor_B1; SET_Motor_A2; SET_Motor_B2; break; case 3: SET_Motor_A1; CLR_Motor_B1; CLR_Motor_A2; SET_Motor_B2; break; default: System.Error_Handler(); } } //更新位置信息 if((++Position) == 4) Position = 0; } //单八拍 if(Bipolar_Step_Motor.Drive_Mode == Drive_Mode_8_Beats) { if(Bipolar_Step_Motor.Direction == Forward_State) { //正向步进 A1 - A1B2 - B2 - B2A2 - A2 - A2B1 - B1 - B1A1 switch(Position) { case 0: SET_Motor_A1; CLR_Motor_B1; CLR_Motor_A2; CLR_Motor_B2; break; case 1: SET_Motor_A1; CLR_Motor_B1; CLR_Motor_A2; SET_Motor_B2; break; case 2: CLR_Motor_A1; CLR_Motor_B1; CLR_Motor_A2; SET_Motor_B2; break; case 3: CLR_Motor_A1; CLR_Motor_B1; SET_Motor_A2; SET_Motor_B2; break; case 4: CLR_Motor_A1; CLR_Motor_B1; SET_Motor_A2; CLR_Motor_B2; break; case 5: CLR_Motor_A1; SET_Motor_B1; SET_Motor_A2; CLR_Motor_B2; break; case 6: CLR_Motor_A1; SET_Motor_B1; CLR_Motor_A2; CLR_Motor_B2; break; case 7: SET_Motor_A1; SET_Motor_B1; CLR_Motor_A2; CLR_Motor_B2; break; default:System.Error_Handler(); } } else { //反向步进 A1 - A1B1 - B1 - B1A2 - A2 - A2B2 - B2 - B2A1 switch(Position) { case 0: SET_Motor_A1; CLR_Motor_B1; CLR_Motor_A2; CLR_Motor_B2; break; case 1: SET_Motor_A1; SET_Motor_B1; CLR_Motor_A2; CLR_Motor_B2; break; case 2: CLR_Motor_A1; SET_Motor_B1; CLR_Motor_A2; CLR_Motor_B2; break; case 3: CLR_Motor_A1; SET_Motor_B1; SET_Motor_A2; CLR_Motor_B2; break; case 4: CLR_Motor_A1; CLR_Motor_B1; SET_Motor_A2; CLR_Motor_B2; break; case 5: CLR_Motor_A1; CLR_Motor_B1; SET_Motor_A2; SET_Motor_B2; break; case 6: CLR_Motor_A1; CLR_Motor_B1; CLR_Motor_A2; SET_Motor_B2; break; case 7: SET_Motor_A1; CLR_Motor_B1; CLR_Motor_A2; SET_Motor_B2; break; default:System.Error_Handler(); } } //更新位置信息 if((++Position) == 8) Position = 0; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
电机转一圈的脉冲次数也不同
如果是四拍,则步进电机转一圈需要这样的四拍48次
如果是八拍,则转一圈需要这样的八拍96次
//定义结构体类变量 Bipolar_Step_Motor_t Bipolar_Step_Motor = { Stop_State, Forward_State, Speed_6, 0, //Drive_Mode_Single_4_Beats, Drive_Mode_Double_4_Beats, //Drive_Mode_8_Beats, 0, (uint8_t)48, //4拍,一圈转48次 //(uint8_t)96, //8拍,一圈转96次 Direction_Adjust, Speed_Adjust, Step_One_Pulse };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
-
相关阅读:
深度学习环境配置(tensorflow、anaconda、pycharm)
pytorch中nn.functional和nn.Module的区别
【面试题精讲】Object类的常见方法有哪些?
K8s 有损发布问题探究
pandas基础笔记01|joyful Pandas学习
Golang源码:singleflight分析(二)
es(Elasticsearch)安装使用(01安装篇)
前端绘制地铁路线图
JAVA后端服务端与移动端客户端高精度时间同步思路
python 处理 dataframe的汇总
- 原文地址:https://blog.csdn.net/weixin_46251230/article/details/126728497
