-
STM32CubeIDE实现基于STM32的LoRa通信程序移植(SPI接口)
一、硬件电路图


LoRa模块链接:
立创商城:LSD4RF-2F717N30_(LSD(利尔达))LSD4RF-2F717N30中文资料_价格_PDF手册-立创电子商城
官网 :
二、 配置工作
1、准备好printf工程,参考之前的教程
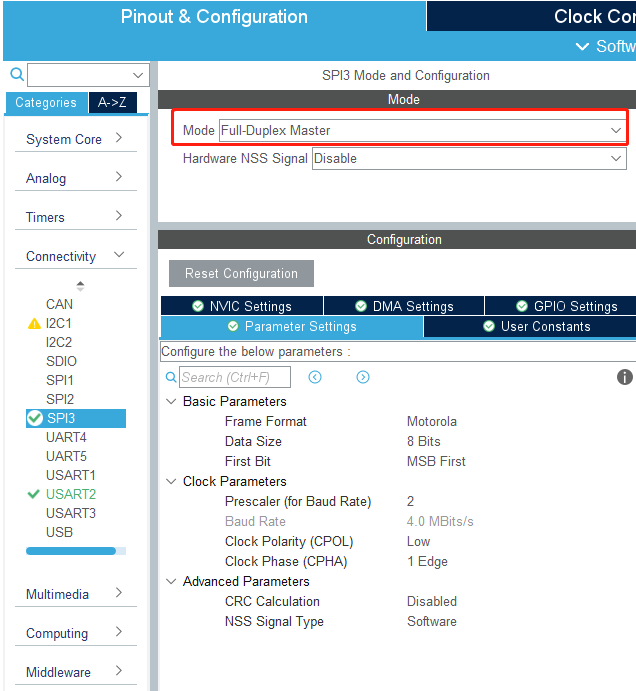
2、配置LoRa引脚
①SPI引脚(其他参数保持默认)
②控制引脚
将PA15、PB7配置为GPIO_output模式,然后右击引脚分别重命名为LORA_NSS、LORA_RESET

③呼吸灯
这里我是用的是PC1作为呼吸灯,其实不论使用哪个引脚控制的呼吸灯,只需将其命名为LED1即可

生成代码

三、代码移植
1、将SX1278直接拷贝到Core文件夹下,然后在STM32CubeIDE中刷新工程(快捷键F5)
SX1278文件可以从下面的连接获取
2、将新添加的文件加入到路径中去
右击platform文件夹,选择Add/remove include path...
需要添加的文件夹一共有三个:platform、platform下的sx12xxEiger、radio

四、代码修改
1、spi.c
在USER CODE BEGIN 1下添加以下代码
- uint8_t SpiInOut( uint8_t TxData )
- {
- uint8_t Rxdata;
- HAL_SPI_TransmitReceive(&hspi3,&TxData,&Rxdata,1, 1000);
- return Rxdata;
- }
2、spi.h
在USER CODE BEGIN Prototypes下添加以下代码
uint8_t SpiInOut( uint8_t TxData );3、main.c
①在USER CODE BEGIN Includes下添加以下代码(为了简单,变量、函数都添加到了这里)
- #include
- #include
- #include "radio.h"
- #include "platform.h"
- #include "sx1276.h"
- #include "sx1276-Hal.h"
- #include "sx1276-LoRa.h"
- #include "sx1276-LoRaMisc.h"
- #define _DEBUG_LORA_TX_ENABLE
- #define BUFFERSIZE 200//收发数据的最大字节数
- #define CIRCLE 16 //收发循环的次�??
- uint8_t LoRa_TX_BUFF[BUFFERSIZE]={
- 00,01,//the ID of the send package
- 0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,//constant,easy to find error in the transition
- 0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99,
- 0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88,0x99};
- uint8_t LoRa_RX_BUFF[BUFFERSIZE];//接收缓冲区,200字节
- uint16_t LoraTxLength=8;//记录发�?�数据的长度
- uint16_t LoraRxLength=8;//记录接收数据的长�??
- uint8_t START_RECEIVE_FLAG=0;
- uint16_t nRx=0;//接收LoRa数据包的个数
- uint16_t nTx=0;//发�?�LoRa数据包的个数
- tRadioDriver *Radio=NULL;
- bool LoraTxOn=false;
- uint16_t last_ID=0;//record the first package's ID when the received MCU started
- uint8_t ndelay=0;
- uint8_t hh=0,mm=0,ss=1;
- void Check_SPI_LoRa(void)
- {
- uint8_t Reg_Version=0;//LoRa的版本,0x12=18才说明SPI通了
- uint8_t CIRCLE_MAX=5;//发�?�循环的次数
- uint8_t t=0;
- uint32_t lora_process=0;
- while(1)//测试SPI是否正常
- {
- SX1276Read( REG_LR_VERSION, &Reg_Version );
- if(Reg_Version!=0x12){
- printf("--------SPI read ERROR !!! --------\r\n");
- printf("LoRa Version = %d !\r\n",Reg_Version);
- HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin);
- HAL_Delay(100);
- }
- else{
- printf("SPI read SUCCESS !!!\r\n");
- printf("LoRa Version = %d !\r\n",Reg_Version);
- break;
- }
- }
- while(1)//测试LoRa是否正常
- {
- if(t++ > CIRCLE_MAX){
- SX1276LoRaSetTxPacket( LoRa_TX_BUFF, LoraTxLength);
- printf("-----------= TX START =-----------\r\n");
- printf("TX:%s \r\n",LoRa_TX_BUFF);
- t=0;
- }
- printf(" t = %d\r\n",t);
- lora_process=SX1276LoRaProcess();
- switch(lora_process)
- {
- case RF_IDLE: //空闲状�??
- printf("lora process:RF_IDLE\r\n");
- t=CIRCLE_MAX+1;
- break;
- case RF_BUSY: //模块执行任务�??
- printf("lora process:RF_BUSY\r\n");
- break;
- case RF_TX_DONE:
- // printf("lora process:RF_TX_DONE\r\n");
- printf("-----------= LoRa TX END =-----------\r\n");
- return;
- break;
- default:
- printf("lora process=%d:unknown status\r\n",(int)lora_process);
- break;
- }
- HAL_Delay(200);
- }
- }
- void LoRaTxTask(void)
- {
- uint8_t RSSI=0,i=0;
- nTx++;
- LoRa_TX_BUFF[0]=(nTx&0xff00)>>8;
- LoRa_TX_BUFF[1]=nTx&0xff;
- SX1276LoRaSetTxPacket( LoRa_TX_BUFF,LoraTxLength );//写入要发送的数据//LoraTxLength
- while(RF_TX_DONE!=SX1276LoRaProcess())HAL_Delay(10);//等待发�?�完�??
- for(i=0;iprintf("%02X->",LoRa_TX_BUFF[i]);printf("\r\n===========LoRa_TX_DONE: %d===========\r\n",nTx);//读取RSSISX1276Read( REG_LR_PKTRSSIVALUE, &RSSI );printf("REG_LR_PKTRSSIVALUE=%d\r\n",RSSI-137);SX1276Read( REG_LR_RSSIVALUE, &RSSI );printf("REG_LR_RSSIVALUE=%d\r\n",RSSI-137);printf("===========LoRa_TX_DONE: %d===========\r\n",nTx);}void Rx_data_process(void){uint8_t RSSI=0;nRx++;//sometime send 5 pack,but only receive the fifth packnTx=(((uint16_t)LoRa_RX_BUFF[0]<<8)&0xff00)+LoRa_RX_BUFF[1];//the numb of send packageif(nTx==1){ //if this package is the first of sendnRx=1;last_ID=nTx-1;}if(START_RECEIVE_FLAG==0)//if receive MCU is first start{START_RECEIVE_FLAG=1;nRx=1;last_ID=nTx-1;}//count the percentage of receiveprintf("ID=%d last_ID=%d\r\n",nTx,last_ID);//ID is the new package;last_ID is the received package ID when the MCU firstly startedprintf("rx=%d,tx=%d\r\n",nRx,nTx-last_ID);//rx is the number of received package from the received MCU started;//nTx-last_ID is the number of send package from the received MCU startedprintf("rx percentage=%f\r\n",(float)(nRx*100.0/(nTx-last_ID)));//read RSSISX1276Read( REG_LR_PKTRSSIVALUE, &RSSI );printf("REG_LR_PKTRSSIVALUE=%d\r\n",RSSI-137); //the closer the lower;the lower the better,the lowest can be -45SX1276Read( REG_LR_RSSIVALUE, &RSSI );printf("REG_LR_RSSIVALUE=%d\r\n",RSSI-137);}void LoRaRxTask(void){uint32_t lora_process=RF_IDLE,i=0;lora_process=SX1276LoRaProcess();switch(lora_process){case RF_IDLE:// printf("loraprocess:RF_IDLE\r\n");break;case RF_RX_DONE:// printf("loraprocess:RF_RX_DONE\r\n");memset(LoRa_RX_BUFF,0,BUFFERSIZE);//娓呯┖缂撳啿鍖�SX1276LoRaGetRxPacket(LoRa_RX_BUFF,&LoraRxLength);//璇诲彇鎺ユ敹鏁版�???printf("LoRa RX data=\r\n");for(i=0;iprintf("%02X->",LoRa_RX_BUFF[i]);printf("\r\n---------- LoRa RX DONE ----------\r\n");Rx_data_process();break;case RF_BUSY:// printf("loraprocess:RF_BUSY\r\n");break;default:printf("loraprocess=%d:unknown status\r\n",(int)lora_process);break;}}void TimeHandle(void){HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin);if(++ss>=60){ss=0;mm++;if(mm>=60){mm=0;hh++;}}printf(" time =%2dh - %02dm - %02ds \r\n",hh,mm,ss);}
②在USER CODE BEGIN 2下添加以下代码
- SX1276Init();// Initialize LoRa modem
- Check_SPI_LoRa();//to check whether SPI can work correctly
- SX1276StartRx();//
③在USER CODE BEGIN 3下添加以下代码
- if(++ndelay>100)//period
- {
- ndelay=0;
- TimeHandle();
- #ifdef _DEBUG_LORA_TX_ENABLE
- //LoRa send a package every 2s
- if(ss%2==0)
- LoRaTxTask();
- #else
- //LoRa receive package
- LoRaRxTask();
- #endif
- }
- HAL_Delay(10);
注:到这里已经能够实现lora的发送功能,要实现接收只需要注释掉main.c中的
#define _DEBUG_LORA_TX_ENABLE五、实验结果

-
相关阅读:
Oracle 19c RAC异机恢复到单机19c(包含PDB)
邮箱格式检测易语言代码
NC65 如何设置现金流量明细查询的查询框中核算账簿可多选??
20 - 欲知JVM调优先了解JVM内存模型
有名管道-
深入理解Java虚拟机(第3版)学习笔记——后端编译与优化(超详细)
SFTP 命令帮助
241. 为运算表达式设计优先级
贴片电阻的读数方法
webpack打包常用配置项
- 原文地址:https://blog.csdn.net/qq_35629563/article/details/126675017
