-
[1]-VIO概述
VIO 概述
1.0 VIO 引出
-
VIO: (Visual-Inertial Odometry)
以视觉与 IMU 融合实现里程计。
-
IMU(Inertial Measurement Unit),惯性测量单元
-
典型 6 轴 IMU 以较高频率(≥ 100Hz)返回被测量物体的角速度与加速度
-
受自身温度、零偏、振动等因素干扰,积分得到的平移和旋转容易漂移
-
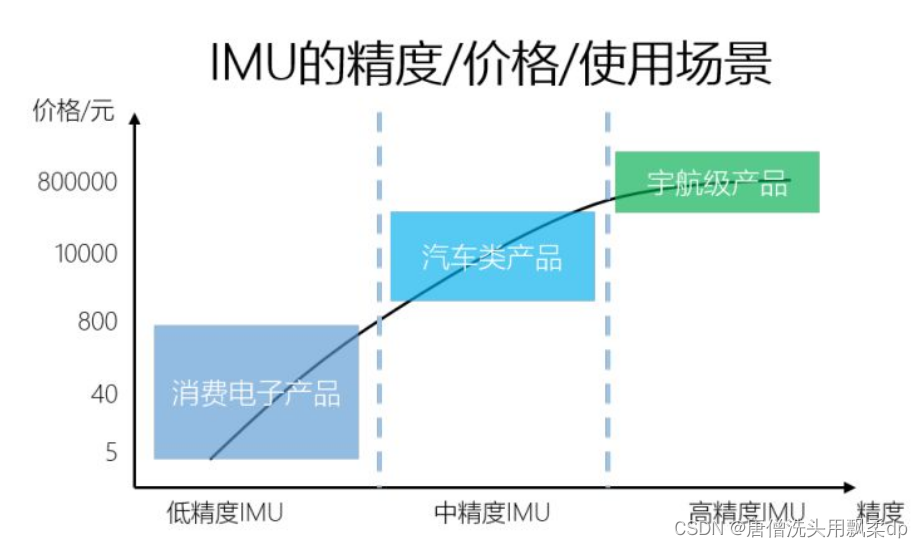
同时 IMU 随着精度和使用场景的不同价格也会出现极大的变化。如下图所示:
-
-
视觉里程计 Visual Odometry
- 以图像形式记录数据,频率较低( 15 − 60 H z 15 − 60Hz 15−60Hz 居多)
- 通过图像特征点或像素推断相机运动
2.0 IMU 与视觉定位优势劣势对比
方案 IMU 视觉 优势 快速响应
不受成像质量影响
角速度普遍比较准确
可估计绝对尺度不产生漂移
直接测量旋转与平移劣势 存在零偏
低精度 IMU 积分位姿发散
高精度价格昂贵受图像遮挡、运动物体干扰
单目视觉无法测量尺度
单目纯旋转运动无法估计
快速运动时易丢失$\quad 整体上,视觉和 IMU 定位方案存在一定互补性质:
- IMU 适合计算短时间、快速的运动。
- 视觉适合计算长时间、慢速的运动。
\quad 同时,可利用视觉定位信息来估计 IMU 的零偏,减少 IMU 由零偏导致的发散和累积误差;反之,IMU 可以为视觉提供快速运动时的定位。
3.0 融合方案
\quad IMU 数据可与多种定位方案融合
- 自动驾驶中通常用 IMU+GPS/差分 GPS/RTK 的融合定位方案,形成 GNSS-INS 组合导航系统,达到厘米组定位精度;
- 头戴式 AR/VR 头盔则多使用视觉 +IMU 的 VIO 定位系统,形成高帧率定位方案。
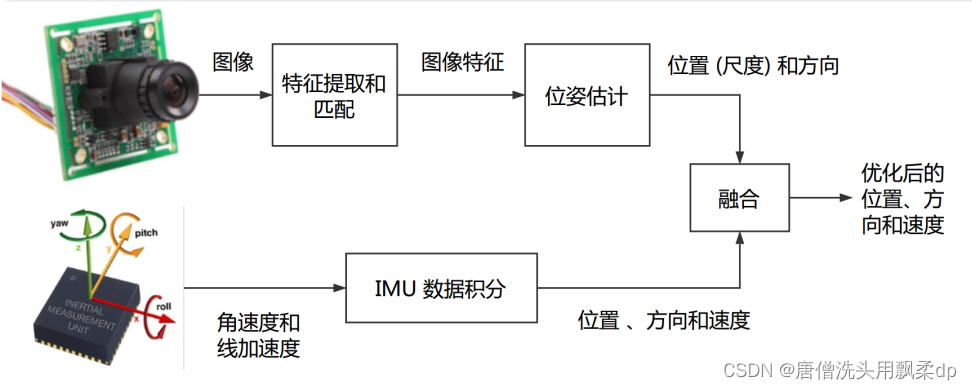
3.1 松耦合
\quad 将 IMU 定位与视觉/GNSS 的位姿直接进行融合,融合过程对二者本身不产生影响,作为后处理方式输出。典型方案为卡尔曼滤波器。整体的框架如下图所示:
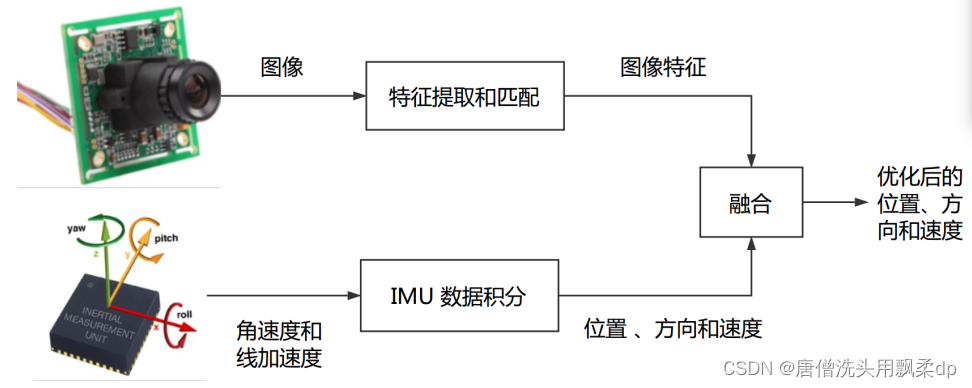
3.2 紧耦合
\quad 融合过程本身会影响视觉和 IMU 中的参数(如 IMU 的零偏和视觉的尺度)。典型方案为 MSCKF 和非线性优化。整体框架如下图所示:
3.3 对比分析
为什么要使用紧耦合?
- 单纯凭(单目)视觉或 IMU 都不具备估计 Pose 的能力:视觉存在尺度不确定性、IMU 存在零偏导致漂移;
- 松耦合中,视觉内部 BA 没有 IMU 的信息,在整体层面来看不是最优的。
- 紧耦合可以一次性建模所有的运动和测量信息,更容易达到最优。
-
-
相关阅读:
“控制情绪,理性交流”刍议
FIFO深度计算学习记录(汇总)
目的:ubuntu配置使用opengl - 初探-创建一个空窗口
并查集(Data Structure for Disjoint Sets)
VB.net:VB.net编程语言学习之基于VS软件利用VB.net语言实现对SolidWorks进行二次开发的简介、案例应用之详细攻略
JetBrains PyCharm Pro 2024 for Mac:智能Python开发的首选工具
windows系统pycharm程序通过urllib下载权重https报错解决
如何理解有害菌,病原菌,致病菌?
JavaWeb简单实例——Ajax请求
Linux 的权限
- 原文地址:https://blog.csdn.net/weixin_45860565/article/details/126694548