-
A* 算法实现与解析
【算法分析】
A*算法适用于结点特别多的场景,常借助于优先队列 priority_queue 实现。
在A*算法的实现中,形如下方的代码,为“结构体内嵌比较函数”。之所以这样写,是因为其执行速度快。
bool operator<(const NODE &a) const {
return F==a.F?G>a.G:F>a.F;
}
下面算法代码执行后,将输出一条如下图所示的绿色最短路径。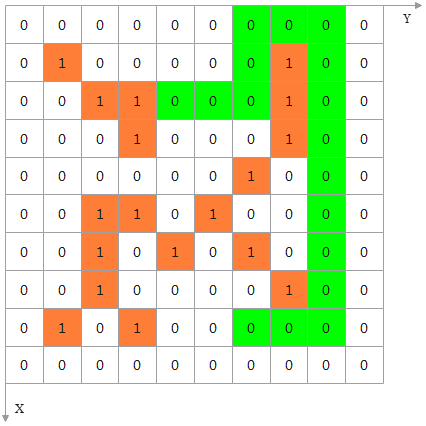
A*算法的经典解析可参见:
https://cloud.tencent.com/developer/article/2040931
https://blog.csdn.net/m0_46304383/article/details/113457800
https://blog.csdn.net/dujuancao11/article/details/109749219
https://www.acwing.com/blog/content/352/
https://blog.csdn.net/qq_43827595/article/details/99546055
【算法代码】
下面代码改编自:https://blog.csdn.net/m0_46304383/article/details/113457800- #include
- using namespace std;
- const int N=10; //Map order
- bool close[N][N]; //Access records, close lists
- int valueF[N][N]; //Record the F value of each node
- int pre[N][N][2]; //Stores the parent node of each node
- int env[N][N]= { //Scene Map
- {0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
- {0, 1, 0, 0, 0, 0, 0, 1, 0, 0},
- {0, 0, 1, 1, 0, 0, 0, 1, 0, 0},
- {0, 0, 0, 1, 0, 0, 0, 1, 0, 0},
- {0, 0, 0, 0, 0, 0, 1, 0, 0, 0},
- {0, 0, 1, 1, 0, 1, 0, 0, 0, 0},
- {0, 0, 1, 0, 1, 0, 1, 0, 0, 0},
- {0, 0, 1, 0, 0, 0, 0, 1, 0, 0},
- {0, 1, 0, 1, 0, 0, 0, 0, 0, 0},
- {0, 0, 0, 0, 0, 0, 0, 0, 0, 0}
- };
- struct NODE {
- int x,y; //Node location
- int F,G,H; //F=G+H
- NODE(int a, int b) { //constructor function
- x=a,y=b;
- }
- //struct's nested comparison function,speed is faster.
- bool operator<(const NODE &a) const {
- return F==a.F?G>a.G:F>a.F;
- }
- };
- //define the direction
- //const int ne_pos[8][2]={{-1,-1},{-1,0},{-1,1},{0,1},{1,1},{1,0},{1,-1},{0,-1}};
- const int ne_pos[4][2]= {{-1,0},{0,1},{1,0},{0,-1}};
- priority_queue
open; - int Manhattan(int x0,int y0,int x1,int y1) {
- return (abs(x0-x1)+abs(y0-y1));
- }
- bool isValidNode(int x,int y,int u,int v) {
- if(x<0||x>=N||y<0||y>=N) return false; //Judge boundary
- if(env[x][y]==1) return false; //Judge obstacle
- /*When two nodes are diagonal and
- their common adjacent nodes have obstacles, return false.
- The rule is used when the scene map has 8 directions.*/
- if(x!=u && y!=v && (env[x][v]==1 || env[u][y]==1)) return false;
- return true;
- }
- void Astar(int x0,int y0,int x1,int y1) {
- NODE node(x0,y0); //Starting point is added into the open list.
- node.G=0;
- node.H=Manhattan(x0,y0,x1,y1);
- node.F=node.G+node.H;
- valueF[x0][y0]=node.F;
- open.push(node);
- while(!open.empty()) {
- /*Take the head element of priority queue,
- which is the point with the least cost in the surrounding cells*/
- NODE cur_node=open.top();
- open.pop(); //Remove from the open list
- //Access this point and add it to the close list
- close[cur_node.x][cur_node.y]=true;
- if(cur_node.x==x1 && cur_node.y==y1) break; //Reach the finish line
- /*Traverse the four directions around the top_node,
- or if the array ne_pos has eight values,
- then you need to traverse the eight directions around the top_node.
- */
- for(int i=0; i<4; i++) {
- //Create a point around top_node
- NODE ne_node(cur_node.x+ne_pos[i][0],cur_node.y+ne_pos[i][1]);
- //The node coordinate is valid and has not been accessed
- if(isValidNode(ne_node.x,ne_node.y,cur_node.x,cur_node.y) && !close[ne_node.x][ne_node.y]) {
- /*Calculate the cost to reach the node
- from the starting point and through the top_node node*/
- ne_node.G=cur_node.G+int(sqrt(pow(ne_pos[i][0],2)+pow(ne_pos[i][1],2)));
- //Calculate the Manhattan distance from the node to the destination
- ne_node.H=Manhattan(ne_node.x,ne_node.y,x1,y1);
- /*The estimated cost to reach the destination
- from the starting point through the top_node
- and the current node*/
- ne_node.F=ne_node.G+ne_node.H;
- /*ne_node.F
- When the condition is met, a better path is found and updated.
- valueF[ne_node.x][ne_node.y]==0,
- When the condition is met, the node is not added to the OPEN table,
- it is needed to be added to the open table*/
- if(ne_node.F
- //Save the parent node of the node
- pre[ne_node.x][ne_node.y][0]=cur_node.x;
- pre[ne_node.x][ne_node.y][1]=cur_node.y;
- //Modify the valueF value of the node
- valueF[ne_node.x][ne_node.y]=ne_node.F;
- open.push(ne_node);
- }
- }
- }
- }
- }
- void PrintPath(int x1,int y1) {
- if(pre[x1][y1][0]==-1 || pre[x1][y1][1]==-1) {
- printf("No path to get.\n");
- return;
- }
- int x=x1,y=y1;
- int a,b;
- while(x!=-1 || y!=-1) {
- env[x][y]=2; //Assign a value of 2 to the node on the feasible path
- a=pre[x][y][0];
- b=pre[x][y][1];
- x=a;
- y=b;
- }
- /*
- " " represents an unpassed node,
- " #" represents an obstacle,
- " @" represents a feasible node.
- */
- string s[3]= {" "," #", " @"};
- for(int i=0; ifor(int j=0; jcout<}cout<}}int main(){memset(close,false,sizeof close); //Initialize close array to falsememset(valueF,0,sizeof valueF); //Initialize F to 0memset(pre,-1,sizeof pre); //Initialize pre array to -1int x0=2,y0=4; //start pointint x1=8,y1=6; //end pointif(!isValidNode(x0,y0,x0,y0)){printf("Invalid input.\n");return 0;}Astar(x0,y0,x1,y1); //A* algorithmPrintPath(x1,y1); //Print the pathreturn 0;}/*output:@ @ @# @ # @# # @ @ @ # @# # @# @# # # @# # # @# # @# # @ @ @*/
【未加注释的算法代码】
鉴于上面代码注释过多,为方便大家快速阅读代码,下面给出的是未加注释版本的算法代码。- #include
- using namespace std;
- const int N=10;
- bool close[N][N];
- int valueF[N][N];
- int pre[N][N][2];
- int env[N][N]= {
- {0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
- {0, 1, 0, 0, 0, 0, 0, 1, 0, 0},
- {0, 0, 1, 1, 0, 0, 0, 1, 0, 0},
- {0, 0, 0, 1, 0, 0, 0, 1, 0, 0},
- {0, 0, 0, 0, 0, 0, 1, 0, 0, 0},
- {0, 0, 1, 1, 0, 1, 0, 0, 0, 0},
- {0, 0, 1, 0, 1, 0, 1, 0, 0, 0},
- {0, 0, 1, 0, 0, 0, 0, 1, 0, 0},
- {0, 1, 0, 1, 0, 0, 0, 0, 0, 0},
- {0, 0, 0, 0, 0, 0, 0, 0, 0, 0}
- };
- struct NODE {
- int x,y;
- int F,G,H;
- NODE(int a, int b) {
- x=a,y=b;
- }
- bool operator<(const NODE &a) const {
- return F==a.F?G>a.G:F>a.F;
- }
- };
- const int ne_pos[4][2]= {{-1,0},{0,1},{1,0},{0,-1}};
- priority_queue
open; - int Manhattan(int x0,int y0,int x1,int y1) {
- return (abs(x0-x1)+abs(y0-y1));
- }
- bool isValidNode(int x,int y,int u,int v) {
- if(x<0||x>=N||y<0||y>=N) return false;
- if(env[x][y]==1) return false;
- if(x!=u && y!=v && (env[x][v]==1 || env[u][y]==1)) return false;
- return true;
- }
- void Astar(int x0,int y0,int x1,int y1) {
- NODE node(x0,y0);
- node.G=0;
- node.H=Manhattan(x0,y0,x1,y1);
- node.F=node.G+node.H;
- valueF[x0][y0]=node.F;
- open.push(node);
- while(!open.empty()) {
- NODE cur_node=open.top();
- open.pop();
- close[cur_node.x][cur_node.y]=true;
- if(cur_node.x==x1 && cur_node.y==y1) break;
- for(int i=0; i<4; i++) {
- NODE ne_node(cur_node.x+ne_pos[i][0],cur_node.y+ne_pos[i][1]);
- if(isValidNode(ne_node.x,ne_node.y,cur_node.x,cur_node.y) && !close[ne_node.x][ne_node.y]) {
- ne_node.G=cur_node.G+int(sqrt(pow(ne_pos[i][0],2)+pow(ne_pos[i][1],2)));
- ne_node.H=Manhattan(ne_node.x,ne_node.y,x1,y1);
- ne_node.F=ne_node.G+ne_node.H;
- if(ne_node.F
- pre[ne_node.x][ne_node.y][0]=cur_node.x;
- pre[ne_node.x][ne_node.y][1]=cur_node.y;
- valueF[ne_node.x][ne_node.y]=ne_node.F;
- open.push(ne_node);
- }
- }
- }
- }
- }
- void PrintPath(int x1,int y1) {
- if(pre[x1][y1][0]==-1 || pre[x1][y1][1]==-1) {
- printf("No path to get.\n");
- return;
- }
- int x=x1,y=y1;
- int a,b;
- while(x!=-1 || y!=-1) {
- env[x][y]=2;
- a=pre[x][y][0];
- b=pre[x][y][1];
- x=a;
- y=b;
- }
- string s[3]= {" "," #", " @"};
- for(int i=0; ifor(int j=0; jcout<}cout<}}int main() {memset(close,false,sizeof close);memset(valueF,0,sizeof valueF);memset(pre,-1,sizeof pre);int x0=2,y0=4;int x1=8,y1=6;if(!isValidNode(x0,y0,x0,y0)) {printf("Invalid input.\n");return 0;}Astar(x0,y0,x1,y1);PrintPath(x1,y1);return 0;}/*output:@ @ @# @ # @# # @ @ @ # @# # @# @# # # @# # # @# # @# # @ @ @*/
【参考文献】
https://cloud.tencent.com/developer/article/2040931
https://blog.csdn.net/m0_46304383/article/details/113457800
https://blog.csdn.net/dujuancao11/article/details/109749219
https://www.acwing.com/blog/content/352/
https://blog.csdn.net/qq_43827595/article/details/99546055- 相关阅读:
客户案例 | 宝藏平台,企业再也不用担心运营管理那些事儿
102 JSON是什么及序列化和反序列化
什么是nacos/cas/fastdfs
中级工程师职称评审中业绩材料具体有哪些呢?甘建二告诉你
JavaScript中this的绑定规则
小程序开发的费用简介篇
什么是渗透测试
Android问题笔记四十二:signal 11 (SIGSEGV), code 1 (SEGV_MAPERR) 的解决方法
NO.1 | 704. 二分查找,27. 移除元素
为什么要用OA办公系统
- 原文地址:https://blog.csdn.net/hnjzsyjyj/article/details/126693357
