-
【STM32F4系列】【HAL库】电机控制(转速和角度)(PID实战1)
项目目标
实现电机最常使用的两个功能,转速控制和位置控制
使用PID闭环控制(控制线性系统最简单快捷的控制方法)
硬件搭建
为了实现控制电机转动和闭环控制
需要:
- 电机(废话)
- 编码器(霍尔编码器或者光电编码器均可)
- 电机驱动(这里选的是l298n模块)
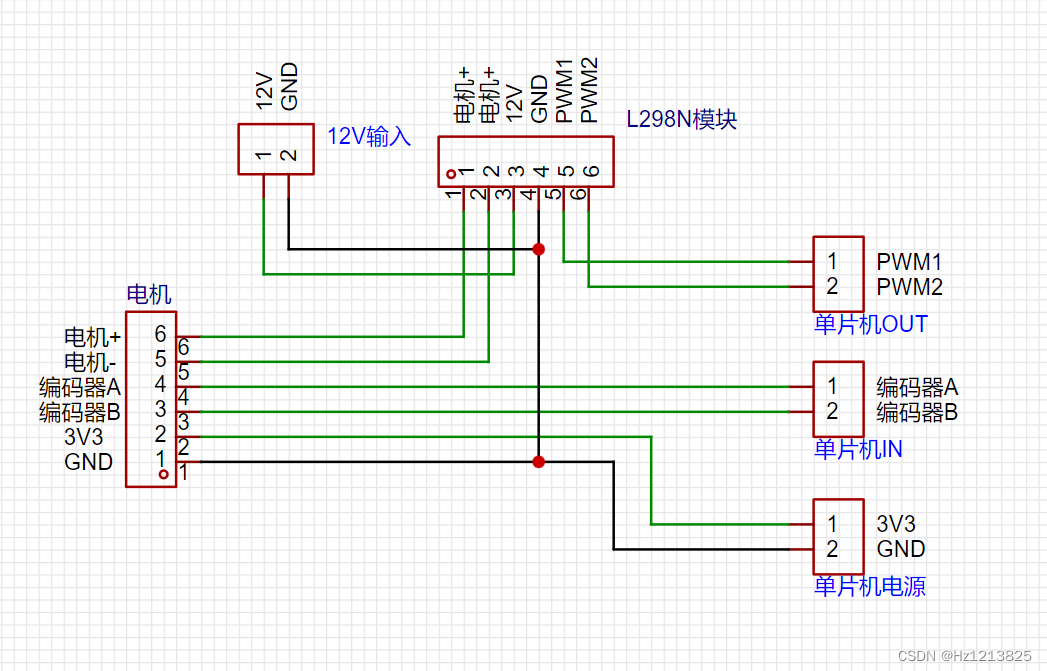
千万注意黑色的地线,单片机的地要与12V的地(L298n的地)连接
HAL初始化
定时器
PWM
使用硬件PWM输出,定时器1,输出两路PWM分别代表PWM1和PWM2
设置频率为2.4KHz(约417us),最大占空比5000
使用通道1和2,其余均默认设置
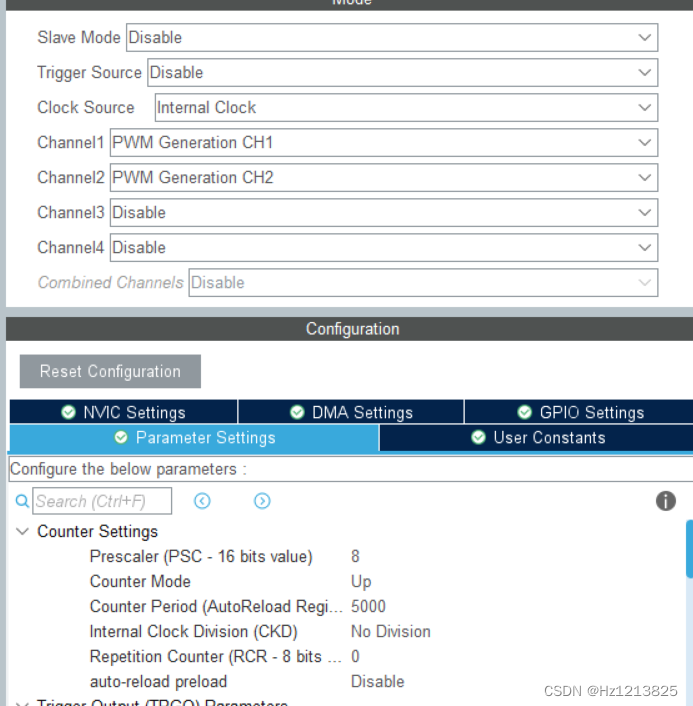
定时器1初始化设置(生成的代码),里开启定时器与PWM输出
HAL_TIM_Base_Start_IT(&htim1); HAL_TIM_Base_Start(&htim1); HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);- 1
- 2
- 3
- 4
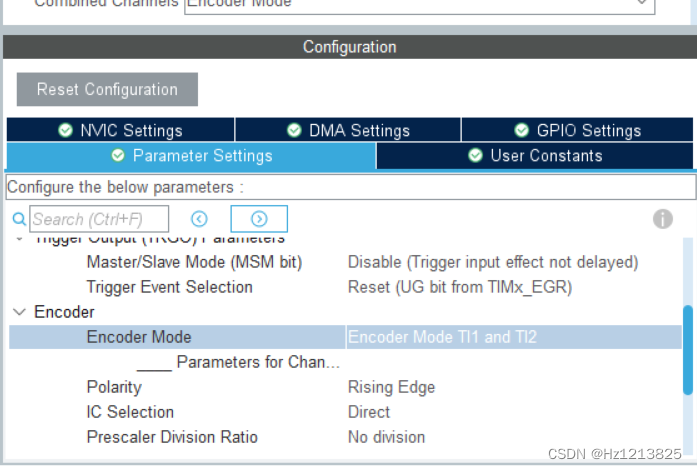
编码器
使用定时器的编码器模式,双边沿计数,默认设置就可
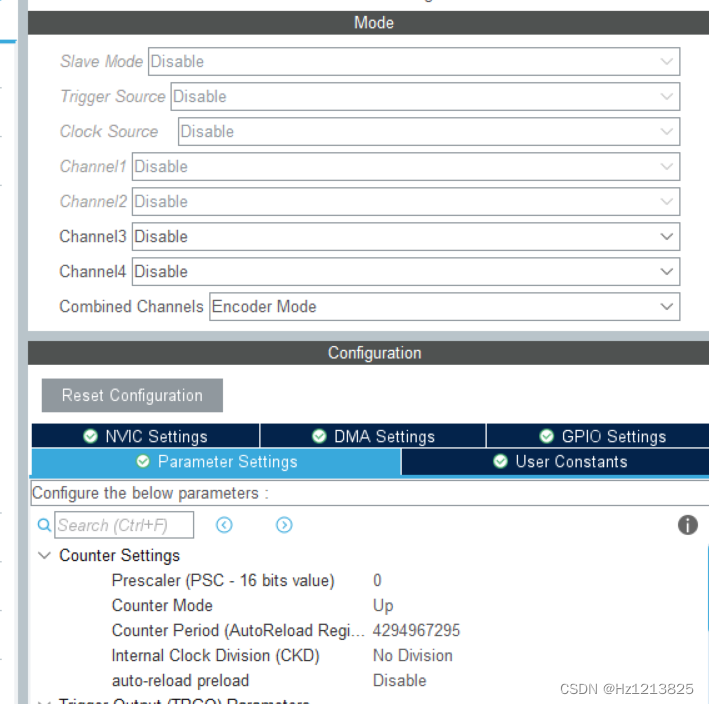
定时器2的初始化设置里加入,开启编码器模式和定时器
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL); //开启编码器模式 HAL_TIM_Base_Start_IT(&htim2); HAL_TIM_Base_Start(&htim2);- 1
- 2
- 3
定时器中断
每10ms触发一次中断,用于计算PID

注意要打开中断
开启定时器中断
HAL_TIM_Base_Start_IT(&htim3); HAL_TIM_Base_Start(&htim3);- 1
- 2
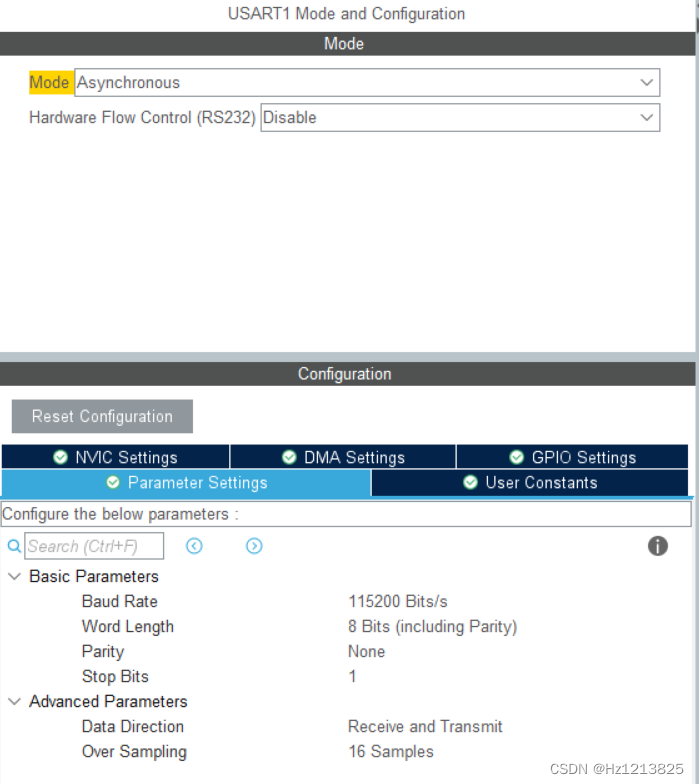
串口
用于调试,默认设置就可,使用printf重定向,无需开启中断
基础驱动
获取速度
定时10ms读取一次编码器的计数值并清零,计算速度
电机是15线霍尔传感器,34:1减速比
详情看这个博客,传送门
float Get_Speed() { int16_t zj; float Speed = 0; zj = __HAL_TIM_GetCounter(&Encoder_TIM_Handle); __HAL_TIM_SetCounter(&Encoder_TIM_Handle, 0); Speed = (float)zj / (4 * 15 * 34) * 100 * 60; return Speed; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
获取角度
间隔一段时间读取编码器的计数值(清零操作交由速度获取函数处理)
调用时需要将函数的输出值进行累加
float Get_Angle() { int16_t zj; float angle = 0; zj = __HAL_TIM_GetCounter(&Encoder_TIM_Handle); angle = (float)zj / (4 * 15 * 34) * 360; return angle; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
电机控制
通过更改PWM的占空比来控制电机转速
void motor(int16_t Speed) { if (Speed == 0) { __HAL_TIM_SET_COMPARE(&Motor_TIM_Handle, Motor_TIM_Channel1, Motor_MAX_Duty + 1); __HAL_TIM_SET_COMPARE(&Motor_TIM_Handle, Motor_TIM_Channel2, Motor_MAX_Duty + 1); } else if (Speed > 0) { __HAL_TIM_SET_COMPARE(&Motor_TIM_Handle, Motor_TIM_Channel1, Speed); __HAL_TIM_SET_COMPARE(&Motor_TIM_Handle, Motor_TIM_Channel2, 0); } else if (Speed < 0) { Speed *= -1; __HAL_TIM_SET_COMPARE(&Motor_TIM_Handle, TIM_CHANNEL_1, 0); __HAL_TIM_SET_COMPARE(&Motor_TIM_Handle, TIM_CHANNEL_2, Speed); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
PID
使用增量式PID
PID原理请看,传送门
typedef struct __PID_Increment_Struct { float Kp, Ki, Kd; //系数 float Error_Last1; //上次误差 float Error_Last2; //上次误差 float Out_Last; //上次输出 } PID_Increment_Struct; float PID_Increment(PID_Increment_Struct *PID, float Current, float Target) { float err, //误差 out, //输出 proportion, //比例 differential; //微分 err = (float)Target - (float)Current; //计算误差 proportion = (float)err - (float)PID->Error_Last1; //计算比例项 differential = (float)err - 2 * (float)PID->Error_Last1 + (float)PID->Error_Last2; //计算微分项 out = (float)PID->Out_Last + (float)PID->Kp * proportion + (float)PID->Ki * err + (float)PID->Kd * differential; //计算PID PID->Error_Last2 = PID->Error_Last1; //更新上上次误差 PID->Error_Last1 = err; //更新误差 PID->Out_Last = out; //更新上此输出 return out; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
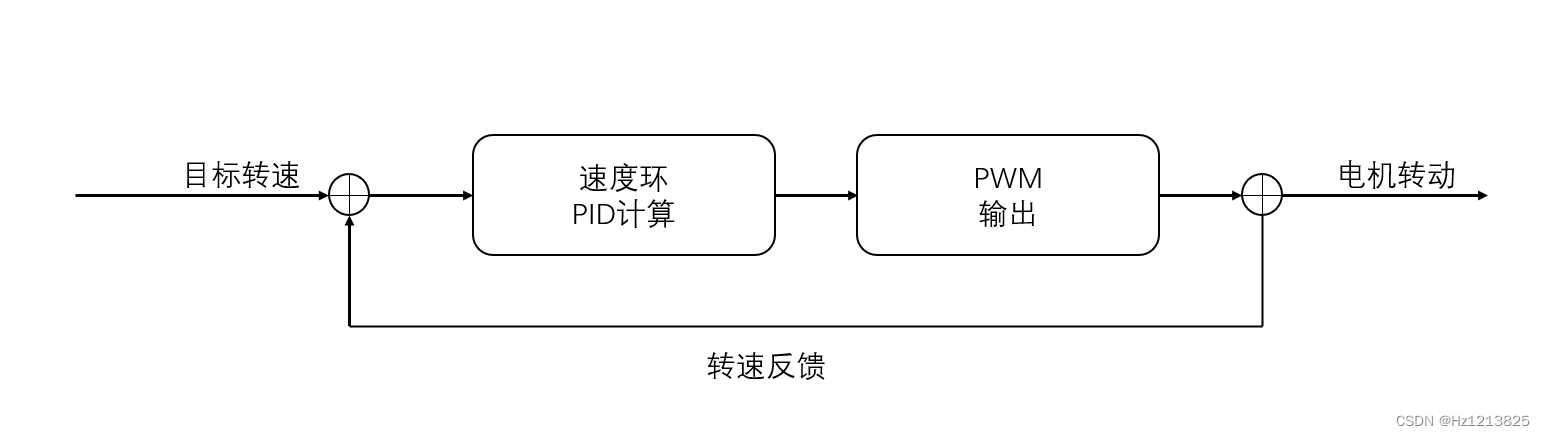
速度环
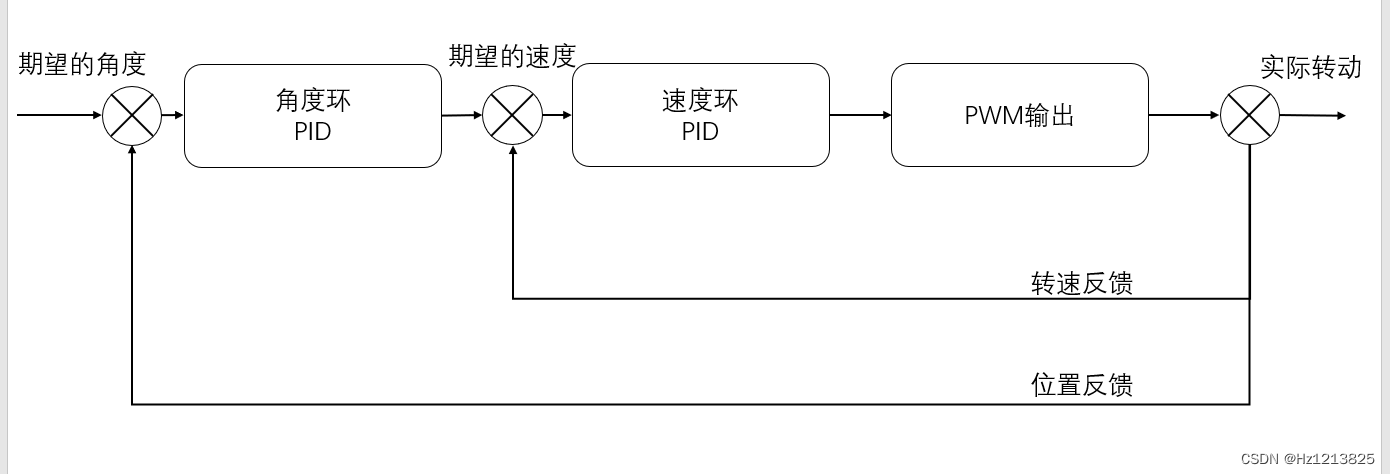
速度环设计
速度环就是让电机保持固定转速的PID控制系统
逻辑框图如下,
通过编码器获得转速送到输入作为反馈
输出通过控制PWM(正负和占空比)来控制电机转速
输入的是目标的转速
注意:PID的系数与间隔时间有关,PID需要间隔固定的时间进行调用
那编程的思路就很明显了,我们使用一个定时器中断,在固定的时间(10ms)调用计算一次PID
在这个定时器中断里,我们首先读取转速,之后压入PID进行计算,再将PWM给到电机就行
为了便于观察,这里加上了使用Printf通过串口发送给上位机显示的功能
这里的PID的参数是我调好的
PID_Increment_Struct PID_Speed = {3, 0.6, 0.6}; void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { float Speed = 0; int16_t set_speed = 0; if (htim == &htim2) { } else if (htim == &htim3) {//10ms中断 Speed = Get_Speed();//获取转速 mb_speed = 3000; set_speed = PID_Increment(&PID_Speed, Speed, mb_speed);//PID if (set_speed > 5000) set_speed = 5000; else if (set_speed < -5000) set_speed = -5000;//限幅 if (set_speed > 500 || set_speed < -500)//死区控制,改善电机异响 motor(set_speed); printf("%f,%f\r\n", Speed,mb_speed);//打印当前和目标转速 } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
速度环调参
调试顺序
这个是我用的电机,从某个车模上拆的,带有15线霍尔传感器,34:1减速比,额定电压12V,额定转速350 r/min

速度环是PID控制器,
我们的调整顺序是P->I->D
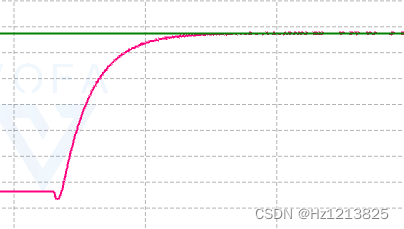
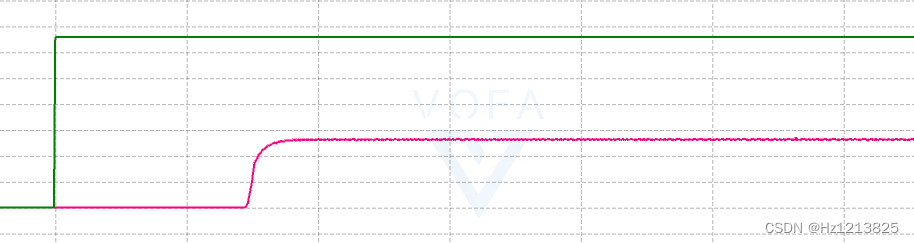
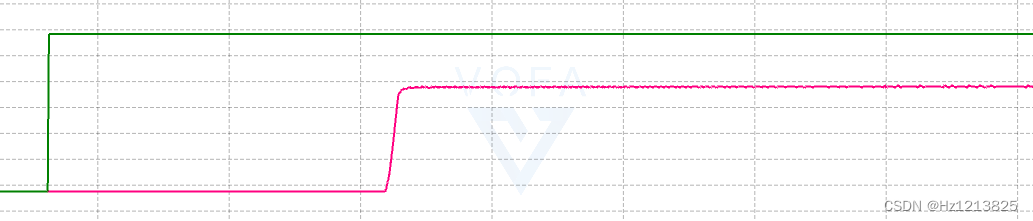
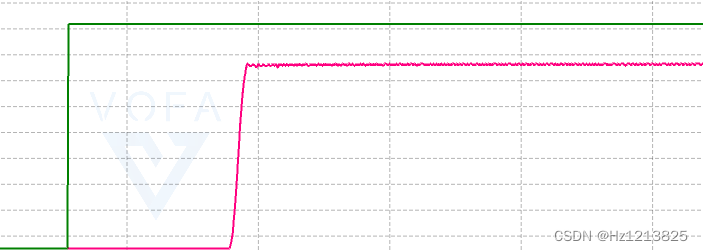
下面的图.横轴是时间,红线代表的是当前转速,绿线代表目标转速
P(比例)
比例部分是绝对的主力
如果P的极性错误,则电机会反相开到最大转速
我们从小向大调
Kp=1,Ki=0
我们可以看到,电机不转动,只有异响,说明Kp过小(至少一个数量级)
我们增大Kp,令Kp=10,Ki=0
可以看到,电机已经开始转动,但是距离需要的转速过远(Kp在同等数量级了)
我们继续增大Kp,令Kp=30,Ki=0
这时发现,转速已经达到了目标转速的2/3以上
这时我们继续增大Kp
Kp增大到80
发现并没有继续接近目标值很多了
这时再增加Kp也不会更接近目标值了
我们需要引入Ki了
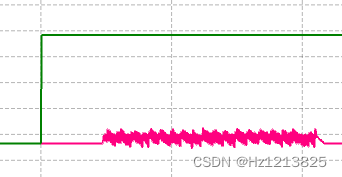
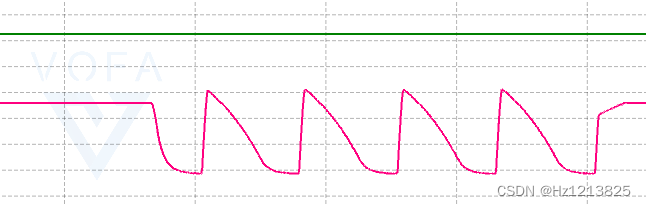
这里放个Kp过大的现象,Kp=700
这种是电机来不及反应造成的
I(积分)
积分项是用于消除静态偏差(也就是Kp在合理范围内变大也无法继续接近目标值的现象)
我们让Kp=30开始调Ki
如果Ki的极性错误,则会出现如下图,即电机来回震荡运动
Kp=80,Ki=1
发现已经可以达到目标值了,回正速度比较慢,我们继续增大Ki(同一数量级)
Kp=80,Ki=5
这时就已经比较完美了,符合了我的要求了
如果自己的要求更高,可以减少步进值慢慢调一下

总结
到了这里,速度环PID我们已经调完了
转速已经可以稳定了
这是调节位置环的前提
位置环
位置环设计
位置环是建立在速度环之上的
使用串级PID进行控制,内环是速度环,外环是位置环
可以加快收敛速度,提高抗干扰能力
我们的策略是当误差大于一圈(>360°或<-360°)时让电机自己以300r/min旋转,不引入PID控制
当误差在一圈内时,使用PID控制
加入位置环的代码如下
PID_Increment_Struct PID_Speed = {3, 0.6, 0.6}; PID_Increment_Struct PID_Angle = {3.1, 0, 0.06}; float angle;//角度 int aa = 0;//目标角度 void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { float Speed = 0; int16_t set_speed = 0; float mb_speed;//目标速度 if (htim == &htim2) { } else if (htim == &htim3) { angle += Get_Angle(); Speed = Get_Speed(); mb_speed = (int16_t)PID_Increment(&PID_Angle, angle, aa); if (PID_Angle.Error_Last1 > 360) mb_speed = 300; else if (PID_Angle.Error_Last1 < -360) mb_speed = -300; // mb_speed = 300; set_speed = PID_Increment(&PID_Speed, Speed, mb_speed); if (set_speed > 5000) set_speed = 5000; else if (set_speed < -5000) set_speed = -5000; if (set_speed > 500 || set_speed < -500)//改善死区 motor(set_speed); //printf("%f\r\n", Speed); Speed = aa; printf("%f,%f\r\n", angle, Speed);//输出当前和目标角度 } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
位置环调参
只使用了P即可达到要求
注意,再位置环调整之前,要将速度环调整完毕
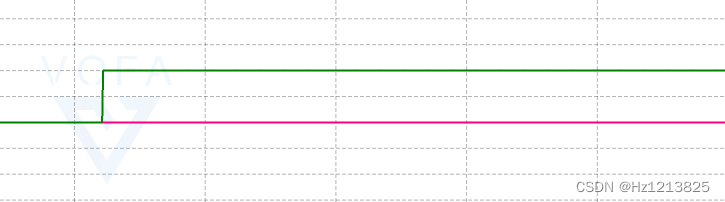
下图的横坐标是时间,红线是当前转动角度,绿线是目标角度
P调参
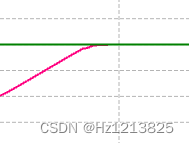
Kp=1时,设置的目标值是4000
前面的直线部分是误差大于一圈的,以固定转速旋转
最后的误差很小了
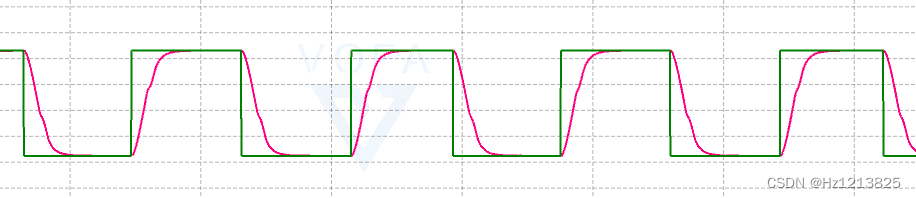
Kp=3
目标值每隔2s从-400到400
成品
电机位置环,串级pid
电机速度环和位置环PID调参教程
-
相关阅读:
Opencv源码解析(2)算法
Nginx正则表达式、location匹配、rewrite重写
激光雷达工作原理简介
九月组队学习计划!
【电路笔记】-电路中的复数与相量(Phasor)
C语言系统化精讲(一):编程基础
Vue——props配置
WebSocket 初体验:构建实时通信应用
1. Tomcat整体架构及其设计精髓分析
「 每日一练,快乐水题 」1608. 特殊数组的特征值
- 原文地址:https://blog.csdn.net/m0_57585228/article/details/126673975
