-
STC15单片机-状态机点灯
状态机点灯
类似状态机检测按键的做法,但这里没有用定时器检测,状态位的切换放在main函数主循环里进行
程序
文件结构
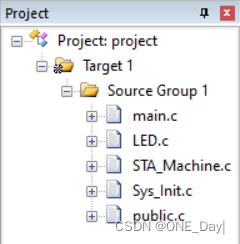
main.c:包含main函数,主要系统逻辑,调用不同的状态函数
LED.c:包含打开运行指示灯,关闭运行指示灯,翻转运行指示灯函数
STA_Machine.c:包含不同状态的函数,函数里实现翻转运行指示灯
Sys_Init.c:系统初始化,包含GPIO初始化,运行指示灯引脚配置成推挽输出
public.c:包含延时函数,public.h文件包含数据类型的重定义
main.c
状态机用switch case 语句进行状态位的切换
/* * @name main * @brief 主函数 * @param void * @retval int */ int main(void) { //系统初始化 Hardware_Init.Sys_Init(); //系统主循环 while(1) { //运行状态机 switch (STA_Machine.ucSTA_Machine_Status) { case STA1:STA_Machine.FUN_STA1(); break; case STA2:STA_Machine.FUN_STA2(); break; case STA3:STA_Machine.FUN_STA3(); break; case STA4:STA_Machine.FUN_STA4(); break; case STA5:STA_Machine.FUN_STA5(); break; case STA6:STA_Machine.FUN_STA6(); break; case STA7:STA_Machine.FUN_STA7(); break; case STA8:STA_Machine.FUN_STA8(); break; default:STA_Machine.ucSTA_Machine_Status = STA1;break; } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
STA_Machine.c
状态机函数,分为8个状态,每个状态可以实现不同的功能,这里只是简单的指示灯翻转,不同状态翻转的时间不同而已
在每一个状态函数实现完功能后,将状态机的状态位变量切换到下一个状态,这样在main函数中才能根据状态位调用这里的函数
状态位一开始初始化为STA1
/* Includes ------------------------------------------------------------------*/ #include/* Private define-------------------------------------------------------------*/ /* Private variables----------------------------------------------------------*/ static void FUN_STA1(void); static void FUN_STA2(void); static void FUN_STA3(void); static void FUN_STA4(void); static void FUN_STA5(void); static void FUN_STA6(void); static void FUN_STA7(void); static void FUN_STA8(void); /* Public variables-----------------------------------------------------------*/ STA_Machine_t STA_Machine = { STA1, FUN_STA1, FUN_STA2, FUN_STA3, FUN_STA4, FUN_STA5, FUN_STA6, FUN_STA7, FUN_STA8 }; /* Private function prototypes------------------------------------------------*/ /* * @name FUN_STA1 * @brief 状态1函数 * @param None * @retval None */ static void FUN_STA1() { LED.Run_LED_Flip(); public.Delay_ms(1000); LED.Run_LED_Flip(); public.Delay_ms(1000); STA_Machine.ucSTA_Machine_Status = STA2; } /* * @name FUN_STA2 * @brief 状态2函数 * @param None * @retval None */ static void FUN_STA2() { LED.Run_LED_Flip(); public.Delay_ms(100); LED.Run_LED_Flip(); public.Delay_ms(100); STA_Machine.ucSTA_Machine_Status = STA3; } /* * @name FUN_STA3 * @brief 状态3函数 * @param None * @retval None */ static void FUN_STA3() { LED.Run_LED_Flip(); public.Delay_ms(1000); LED.Run_LED_Flip(); public.Delay_ms(1000); STA_Machine.ucSTA_Machine_Status = STA4; } /* * @name FUN_STA4 * @brief 状态4函数 * @param None * @retval None */ static void FUN_STA4() { LED.Run_LED_Flip(); public.Delay_ms(100); LED.Run_LED_Flip(); public.Delay_ms(100); STA_Machine.ucSTA_Machine_Status = STA5; } /* * @name FUN_STA5 * @brief 状态5函数 * @param None * @retval None */ static void FUN_STA5() { LED.Run_LED_Flip(); public.Delay_ms(1000); LED.Run_LED_Flip(); public.Delay_ms(1000); STA_Machine.ucSTA_Machine_Status = STA6; } /* * @name FUN_STA6 * @brief 状态6函数 * @param None * @retval None */ static void FUN_STA6() { LED.Run_LED_Flip(); public.Delay_ms(100); LED.Run_LED_Flip(); public.Delay_ms(100); STA_Machine.ucSTA_Machine_Status = STA7; } /* * @name FUN_STA7 * @brief 状态7函数 * @param None * @retval None */ static void FUN_STA7() { LED.Run_LED_Flip(); public.Delay_ms(1000); LED.Run_LED_Flip(); public.Delay_ms(1000); STA_Machine.ucSTA_Machine_Status = STA8; } /* * @name FUN_STA8 * @brief 状态8函数 * @param None * @retval None */ static void FUN_STA8() { LED.Run_LED_Flip(); public.Delay_ms(100); LED.Run_LED_Flip(); public.Delay_ms(100); STA_Machine.ucSTA_Machine_Status = STA1; } /******************************************************** End Of File ********************************************************/ - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
STA_Machine.h
头文件中要定义状态位的枚举类型,并声明变量
#ifndef __STA_MACHINE_H_ #define __STA_MACHINE_H_ //定义状态位枚举类型 typedef enum { STA1 = (uint8_t)0x01, STA2 = (uint8_t)0x02, STA3 = (uint8_t)0x03, STA4 = (uint8_t)0x04, STA5 = (uint8_t)0x05, STA6 = (uint8_t)0x06, STA7 = (uint8_t)0x07, STA8 = (uint8_t)0x08 }STA_Machine_Status_t; //定义结构体 typedef struct { STA_Machine_Status_t ucSTA_Machine_Status; void (*FUN_STA1)(void); void (*FUN_STA2)(void); void (*FUN_STA3)(void); void (*FUN_STA4)(void); void (*FUN_STA5)(void); void (*FUN_STA6)(void); void (*FUN_STA7)(void); void (*FUN_STA8)(void); }STA_Machine_t; /* extern variables-----------------------------------------------------------*/ extern STA_Machine_t STA_Machine; /* extern function prototypes-------------------------------------------------*/- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
-
相关阅读:
深入URP之Shader篇2: 目录结构和Unlit Shader分析[上]
普通上班族搞什么副业能赚钱?
字符串 13.激光镜像
接口和抽象类/方法学习 demo
BFS:845. 八数码
2022强网杯WP
制作canal-adapter的docker镜像
【Docker安装部署RocketMQ消息中间件详细教程】
「设计模式」六大原则之里氏替换原则小结
C专家编程 第8章 为什么程序员无法分清万圣节和圣诞节 8.5 原型在什么地方会失败
- 原文地址:https://blog.csdn.net/weixin_46251230/article/details/126672188
