-
自动控制原理6.4---前馈校正
参考书籍:《自动控制原理》(第七版).胡寿松主编.
《自动控制原理PDF版下载》
4.前馈校正
4.1 前置滤波组合校正
为了改善系统性能,在系统中常引入形如 G c ( s ) = ( s + z ) / ( s + p ) G_c(s)=(s+z)/(s+p) Gc(s)=(s+z)/(s+p)的串联校正网络,以改变系统的闭环极点;但 G c ( s ) G_c(s) Gc(s)同时会在系统闭环传递函数 Φ ( s ) \Phi(s) Φ(s)中增加一个新的零点,这个新增的零点可能会严重影响闭环系统的动态性能;此时,可考虑在系统的输入端串联一个前置滤波器,以消除新增闭环零点的不利影响;
实例分析:
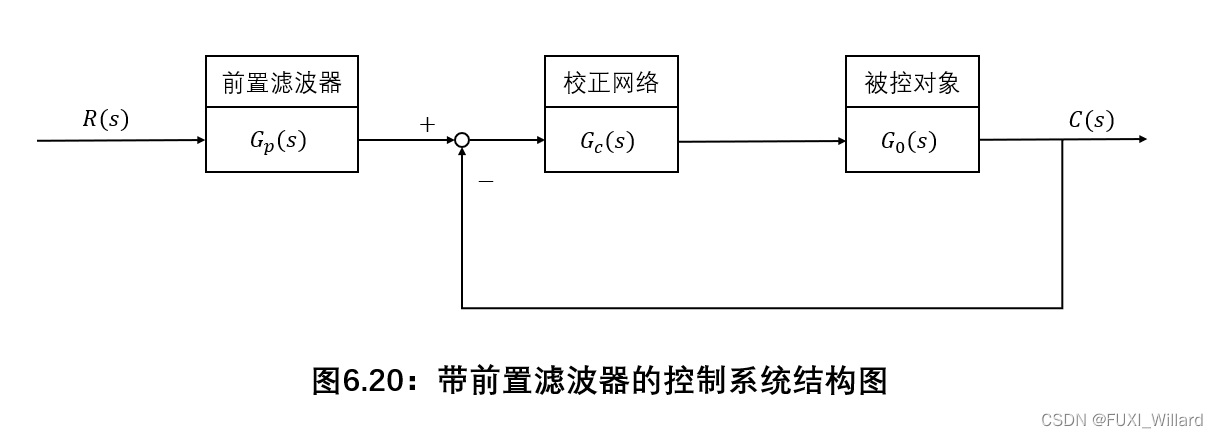
E x a m p l e 1 : {\rm Example1:} Example1: 设带有前置滤波器的控制系统如下图所示,其中,被控对象为 G 0 ( s ) = 1 s G_0(s)=\displaystyle\frac{1}{s} G0(s)=s1,串联校正网络为 P I {\rm PI} PI控制器, G c ( s ) = K 1 + K 2 s = K 1 s + K 2 s G_c(s)=K_1+\displaystyle\frac{K_2}{s}=\frac{K_1s+K_2}{s} Gc(s)=K1+sK2=sK1s+K2, G p ( s ) G_p(s) Gp(s)为前置滤波器。
系统设计要求为:
- 系统阻尼比 ζ d = 1 2 = 0.707 \zeta_d=\displaystyle\frac{1}{\sqrt{2}}=0.707 ζd=21=0.707;
- 阶跃响应超调量 σ % ≤ 5 % \sigma\%≤5\% σ%≤5%;
- 阶跃响应的调节时间 t s ≤ 0.6 s ( Δ = 2 % ) t_s≤0.6{\rm s}(\Delta=2\%) ts≤0.6s(Δ=2%);
试设计 K 1 , K 2 , G p ( s ) K_1,K_2,G_p(s) K1,K2,Gp(s);
解:
系统的闭环传递函数为:
Φ ( s ) = ( K 1 s + K 2 ) G p ( s ) s 2 + K 1 s + K 2 \Phi(s)=\frac{(K_1s+K_2)G_p(s)}{s^2+K_1s+K_2} Φ(s)=s2+K1s+K2(K1s+K2)Gp(s)
闭环系统特征方程为:
s 2 + K 1 s + K 2 = s 2 + 2 ζ d ω n s + ω n 2 = 0 s^2+K_1s+K_2=s^2+2\zeta_d\omega_ns+\omega_n^2=0 s2+K1s+K2=s2+2ζdωns+ωn2=0
根据系统对阻尼比和调节时间的要求,令 ζ d = 0.707 \zeta_d=0.707 ζd=0.707,且
t s = 4.4 ζ d ω n ≤ 0.6 ( Δ = 2 % ) t_s=\frac{4.4}{\zeta_d\omega_n}≤0.6(\Delta=2\%) ts=ζdωn4.4≤0.6(Δ=2%)
可得: ζ d ω n ≥ 7.33 \zeta_d\omega_n≥7.33 ζdωn≥7.33,取: ζ d ω n = 8 \zeta_d\omega_n=8 ζdωn=8,可得: ω n = 8 2 \omega_n=8\sqrt{2} ωn=82;可得 P I {\rm PI} PI控制器参数为:
K 1 = 2 ζ d ω n = 16 , K 2 = ω n 2 = 128 K_1=2\zeta_d\omega_n=16,K_2=\omega_n^2=128 K1=2ζdωn=16,K2=ωn2=128
若不引入前置滤波器,相当于 G p ( s ) = 1 G_p(s)=1 Gp(s)=1,则系统的闭环传递函数为:
Φ ( s ) = 16 ( s + 8 ) s 2 + 16 s + 128 = ω n 2 z s + z s 2 + 2 ζ d ω n s + ω n 2 \Phi(s)=\frac{16(s+8)}{s^2+16s+128}=\frac{\omega_n^2}{z}\frac{s+z}{s^2+2\zeta_d\omega_ns+\omega_n^2} Φ(s)=s2+16s+12816(s+8)=zωn2s2+2ζdωns+ωn2s+z
此时系统为有零点二阶系统,根据: ζ d = 1 / 2 , ω n = 8 2 , z = 8 \zeta_d=1/\sqrt{2},\omega_n=8\sqrt{2},z=8 ζd=1/2,ωn=82,z=8,根据公式可得:
c ( t ) = 1 + r e − ζ d ω n t sin ( ω n 1 − ζ d 2 t + ψ ) c(t)=1+r{\rm e}^{-\zeta_d\omega_nt}\sin(\omega_n\sqrt{1-\zeta_d^2}t+\psi) c(t)=1+re−ζdωntsin(ωn1−ζd2t+ψ)
计算其中参数:
r = z 2 − 2 ζ d ω n z + ω n 2 z 1 − ζ d 2 = 1.41 , β d = arctan 1 − ζ d 2 ζ d = π 4 ψ = − π + arctan ( ω n 1 − ζ d 2 z − ζ d ω n ) + arctan ( 1 − ζ d 2 ζ d ) = − π 4 r=√z2−2ζdωnz+ω2nz√1−ζ2d=1.41,βd=arctan√1−ζ2dζd=π4ψ=−π+arctan(ωn√1−ζ2dz−ζdωn)+arctan(√1−ζ2dζd)=−π4 r=z1−ζd2z2−2ζdωnz+ωn2=1.41,βd=arctanζd1−ζd2=4πψ=−π+arctan(z−ζdωnωn1−ζd2)+arctan(ζd1−ζd2)=−4π无前置滤波器时,系统的动态性能如下:
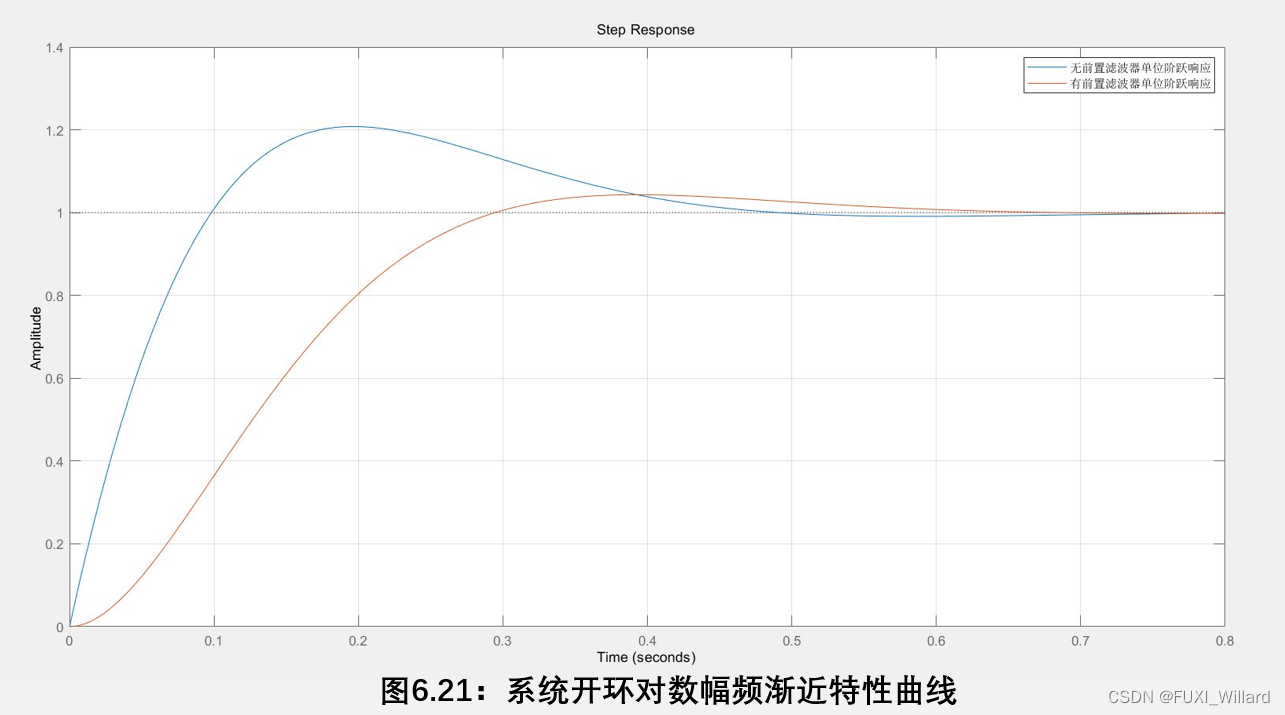
t r = 0.75 ω n = 0.07 s ( z ζ d ω n = 1 , ω n t r = 0.75 ) t p = β d − ψ ω n 1 − ζ d 2 = 0.2 s σ % = r 1 − ζ d 2 e − ζ d ω n t p × 100 % = 20.0 % t s = 4 + ln r ζ d ω n = 0.54 s ( Δ = 2 % ) tr=0.75ωn=0.07s (zζdωn=1,ωntr=0.75)tp=βd−ψωn√1−ζ2d=0.2sσ%=r√1−ζ2de−ζdωntp×100%=20.0%ts=4+lnrζdωn=0.54s (Δ=2%) tr=ωn0.75=0.07s (ζdωnz=1,ωntr=0.75)tp=ωn1−ζd2βd−ψ=0.2sσ%=r1−ζd2e−ζdωntp×100%=20.0%ts=ζdωn4+lnr=0.54s (Δ=2%)
由于新增零点的影响,超调量无法满足设计指标要求;考虑采用前置滤波器 G p ( s ) G_p(s) Gp(s)来对消闭环传递函数 Φ ( s ) \Phi(s) Φ(s)中的零点,同时保持系统原有的直流增益 Φ ( 0 ) \Phi(0) Φ(0)不变,取:
G p ( s ) = 8 s + 8 G_p(s)=\frac{8}{s+8} Gp(s)=s+88
闭环传递函数变为:
Φ ( s ) = 128 s 2 + 16 s + 128 \Phi(s)=\frac{128}{s^2+16s+128} Φ(s)=s2+16s+128128
此时,系统属于无零点的二阶系统;
β = arccos ζ = π 4 , ω d = ω n 1 − ζ 2 = 8 \beta=\arccos\zeta=\frac{\pi}{4},\omega_d=\omega_n\sqrt{1-\zeta^2}=8 β=arccosζ=4π,ωd=ωn1−ζ2=8
此时系统的动态性能指标:
t r = π − β ω d = 0.29 s , t p = π ω d = 0.39 s σ % = e − π ζ / 1 − ζ 2 × 100 % = 4.3 % , t s = 4.4 ζ ω n = 0.55 s ( Δ = 2 % ) tr=π−βωd=0.29s,tp=πωd=0.39sσ%=e−πζ/√1−ζ2×100%=4.3%,ts=4.4ζωn=0.55s(Δ=2%) tr=ωdπ−β=0.29s,tp=ωdπ=0.39sσ%=e−πζ/1−ζ2×100%=4.3%,ts=ζωn4.4=0.55s(Δ=2%)可知,系统设计指标要求全部满足;
4.2 最小节拍组合校正(简单了解)
最小节拍响应:指以最小的超调量快速达到并保持在稳态响应允许波动范围内的时间响应;

当系统输入为阶跃信号时,允许波动范围取为稳态响应的 ± 2 % ±2\% ±2%误差带,系统的调节时间就是响应首次进入波动带的时间;
最小节拍响应的特征:
- 在阶跃输入作用下,稳态误差为零;
- 阶跃响应具有最小的上升时间和调节时间;
- 阶跃响应超调量 < 2 % <2\% <2%;
-
相关阅读:
C++的向上转型
展会邀请|虹科诚邀您9月14-16日参加第四届自动驾驶地图与定位大会和第五届自动驾驶与人机共驾论坛
java计算机毕业设计web家庭财务管理系统MyBatis+系统+LW文档+源码+调试部署
C++设计模式 - 创建型模式之工厂模式
css第二课:外部样式link和import的运用及行内样式的介绍
linux系统iptables的操作
Linux安装Matlab运行时
【Pygame 学习笔记】8.精灵
Unity(三) Shader着色器初探
码蹄集 - MT3149 · AND - 数据不是很强,暴力剪枝就能骗AC
- 原文地址:https://blog.csdn.net/qq_39032096/article/details/126649336