-
Intel RealSense D435i与IMU标定用于vins-fusion
1、标定imu工具
mkdir -p imu_catkin_ws/src cd imu_catkin_ws/src git clone https://github.com/gaowenliang/code_utils.git git clone https://github.com/gaowenliang/imu_utils.git cd .. catkin_make source /devel/setup.bash- 1
- 2
- 3
- 4
- 5
- 6
- 7
-----------------------------------------------------------出现的问题--------------------------------------------------
/home/sfann/imu_catkin_ws/src/code_utils-master/include/code_utils/backward.hpp:216:12: fatal error: elfutils/libdw.h: 没有那个文件或目录
include
compilation terminated.
sudo apt-get install libdw-dev- 1
/home/sfann/imu_catkin_ws/src/code_utils-master/src/sumpixel_test.cpp:2:10: fatal error: backward.hpp: 没有那个文件或目录
#include “backward.hpp”
compilation terminated.
code_utils-master/CMakeFiles/sumpixel_test.dir/build.make:62: recipe for target ‘code_utils-master/CMakeFiles/sumpixel_test.dir/src/sumpixel_test.cpp.o’ failed
make[2]: *** [code_utils-master/CMakeFiles/sumpixel_test.dir/src/sumpixel_test.cpp.o] Error 1
CMakeFiles/Makefile2:857: recipe for target ‘code_utils-master/CMakeFiles/sumpixel_test.dir/all’ failed
make[1]: *** [code_utils-master/CMakeFiles/sumpixel_test.dir/all] Error 2
make[1]: *** 正在等待未完成的任务…
In file included from /home/sfann/imu_catkin_ws/src/code_utils-master/src/mat_io_test.cpp:2:0:
/home/sfann/imu_catkin_ws/src/code_utils-master/include/code_utils/backward.hpp:216:12: fatal error: elfutils/libdw.h: 没有那个文件或目录include
compilation terminated.
code_utils-master/CMakeFiles/matIO_test.dir/build.make:62: recipe for target ‘code_utils-master/CMakeFiles/matIO_test.dir/src/mat_io_test.cpp.o’ failed
make[2]: *** [code_utils-master/CMakeFiles/matIO_test.dir/src/mat_io_test.cpp.o] Error 1
CMakeFiles/Makefile2:719: recipe for target ‘code_utils-master/CMakeFiles/matIO_test.dir/all’ failed
make[1]: *** [code_utils-master/CMakeFiles/matIO_test.dir/all] Error 2
Makefile:140: recipe for target ‘all’ failed
make: *** [all] Error 2
Invoking “make -j4 -l4” failed将sumpixel_test.cpp中# include "backward.hpp"改为:#include "code_utils/backward.hpp"- 1
******************imu标定
打开/imu_catkin_ws/src/imu_utils/launch,打开终端运行roslaunch mavros px4.launch gedit imu_calibration.launch- 1
- 2
launch文件中写入如下内容
<launch> <node pkg="imu_utils" type="imu_an" name="imu_an" output="screen"> <!--TOPIC名称和上面一致--> <param name="imu_topic" type="string" value= "/mavros/imu/data"/> <!--imu_name 无所谓--> <param name="imu_name" type="string" value= "px4"/> <!--标定结果存放路径--> <param name="data_save_path" type="string" value= "$(find imu_utils)/data/"/> <!--数据录制时间-min--> <param name="max_time_min" type="int" value= "120"/> <!--采样频率,即是IMU频率,采样频率可以使用rostopic hz /camera/imu查看,设置为400,为后面的rosbag play播放频率--> <param name="max_cluster" type="int" value= "200"/> </node> </launch>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
插上相机,realsense静止放置,放置时间要稍大于imu_calibration.launch中的录制时间,即大于120分钟
rosbag record -O imu_calibration /mavros/imu/data- 1
等待两小时录制完之后就按下ctrl+c,结束录制。运行校准程序
roslaunch imu_utils imu_calibration.launch rosbag play -r 400 imu_calibration.bag- 1
- 2
其中 -r 400是指400速播放bag数据
标定结束后在imu_catkin_ws/src/imu_utils/data中生成许多文件,其中imu_param.yaml就是我们想要的结果,展示如下:
2、相机标定工具kalibr
依赖环境sudo apt-get install python-setuptools python-rosinstall ipython libeigen3-dev libboost-all-dev doxygen libopencv-dev sudo apt-get install ros-melodic-vision-opencv ros-melodic-image-transport-plugins ros-melodic-cmake-modules sudo apt-get install software-properties-common software-properties-common libpoco-dev python-matplotlib python-scipy python-git python-pip ipython sudo apt-get install libtbb-dev libblas-dev liblapack-dev python-catkin-tools libv4l-dev sudo apt-get install python-igraph- 1
- 2
- 3
- 4
- 5
mkdir -p /kalibr_workspace/src cd /kalibr_workspace source /opt/ros/melodic/setup.bash catkin init catkin config --extend /opt/ros/melodic catkin config --merge-devel # Necessary for catkin_tools >= 0.4. catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release cd /kalibr_workspace/src git clone https://github.com/ethz-asl/Kalibr.git git clone https://github.com/ethz-asl/kalibr/tree/fix/18.04.git catkin build -DCMAKE_BUILD_TYPE=Release -j4 source ~/kalibr_workspace/devel/setup.bash- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
下载标定板
https://github.com/ethz-asl/kalibr/wiki/downloads- 1
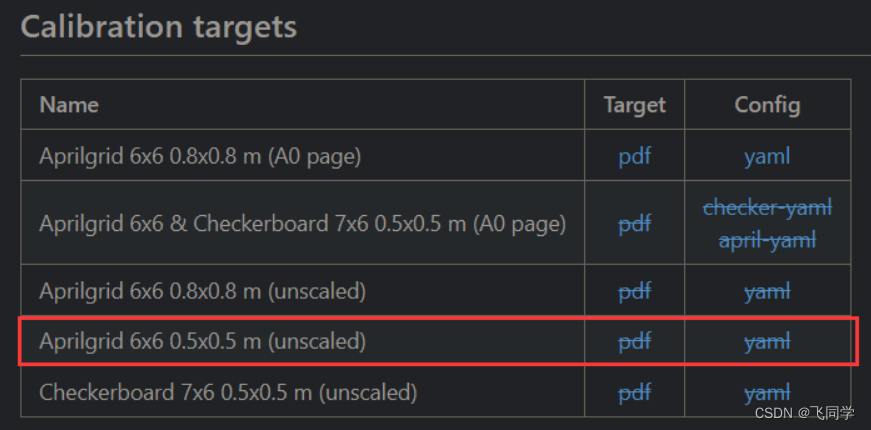
原始pdf的格子参数是:6*6的格子
大格子边长:5.5cm
小格子边长:1.65cm
小格子与大格子边长比例:0.3
打印A4纸的格子参数是:
大格子边长:2.4cm
小格子边长:0.7cm
小格子与大格子边长比例:0.3
生产标定板文件cd kalibr_workspace gedit april_6x6_A4.yaml kalibr_create_target_pdf --type apriltag --nx 6 --ny 6 --tsize 0.024 --tspace 0.3- 1
- 2
- 3
填写内容
target_type: 'aprilgrid' #gridtype tagCols: 6 #number of apriltags tagRows: 6 #number of apriltags tagSize: 0.024 #size of apriltag, edge to edge [m] tagSpacing: 0.3 #ratio of space between tags to tagSize- 1
- 2
- 3
- 4
- 5
标定板参数定义
–type apriltag 标定板类型
–nx [NUM_COLS] 列个数
–ny [NUM_ROWS] 行个数
–tsize [TAG_WIDTH_M] 二维码方格长度,单位m
–tspace [TAG_SPACING_PERCENT] 小方格与二维码方格长度比例
关闭结构光
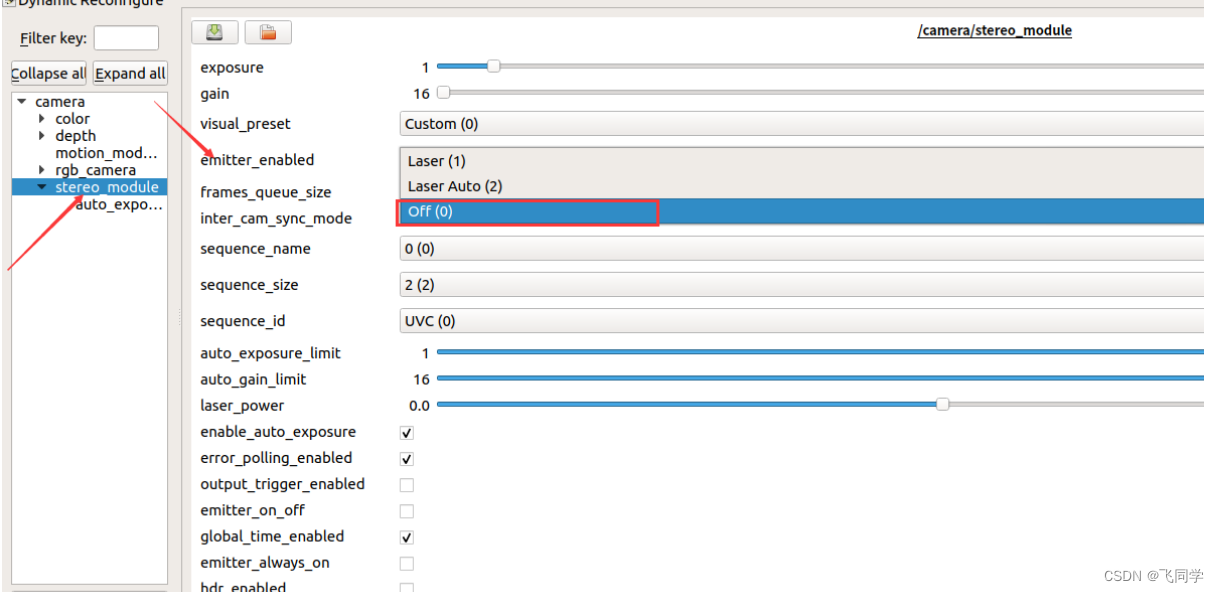
roslaunch realsense2_camera rs_camera.launch rviz rosrun topic_tools throttle messages /camera/color/image_raw 4.0 /color & rosrun topic_tools throttle messages /camera/infra1/image_rect_raw 4.0 /infra_left & rosrun topic_tools throttle messages /camera/infra2/image_rect_raw 4.0 /infra_right rosbag record -O multicameras_calibration /infra_left /infra_right /color rosrun kalibr kalibr_calibrate_cameras --target april_6x6_A4.yaml --bag multicameras_calibration.bag --models pinhole-equi pinhole-equi pinhole-equi --topics /infra_left /infra_right /color --bag-from-to 10 100 --show-extraction- 1
- 2
- 3
- 4
- 5
打开rviz观察合理的距离,要求摄像头能看到标定棋盘格。
kalibr在处理标定数据的时候要求频率不能太高,一般为4Hz,我们可以使用如下命令来更改topic的频率,实际上是将原来的topic以新的频率转成新的topic,实际测试infra1才是对应左目相机3、IMU+双目标定
- 编辑yaml文件
新建 camchain.yaml,imu.yaml
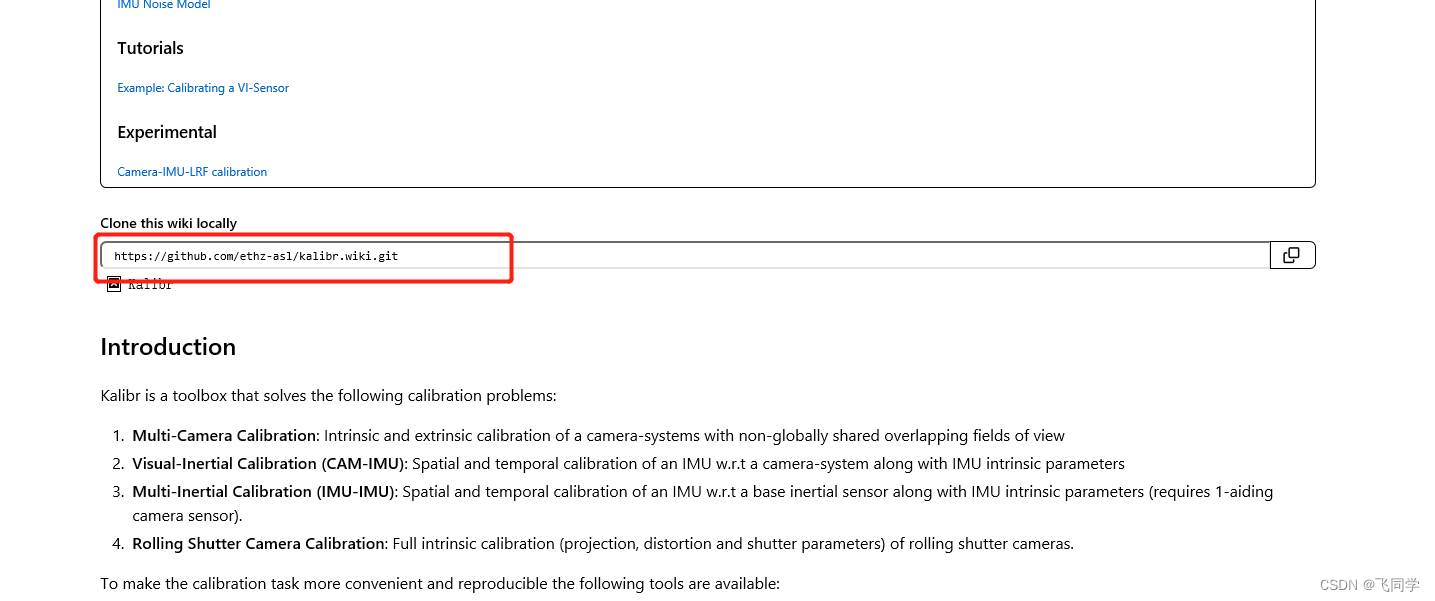
官方教程https://github.com/ethz-asl/kalibr/wiki/yaml-formats
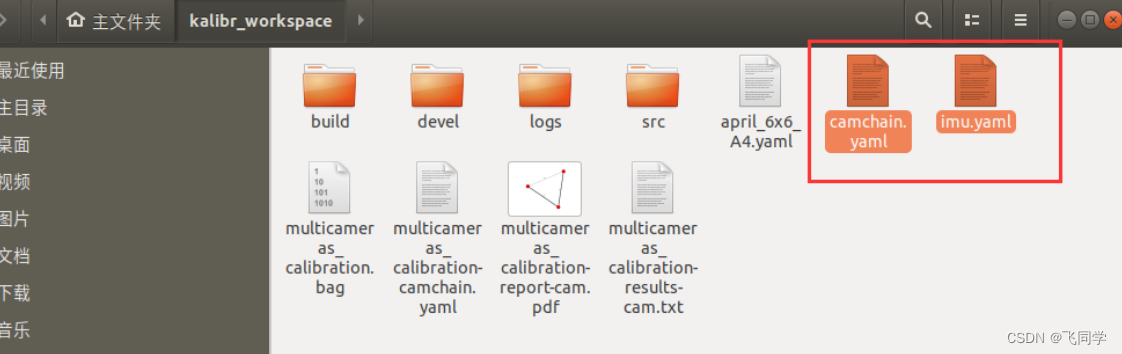
gedit camchain.yaml- 1
参数参考上面得到的yaml文件,没有的参数可以删除,最终结果示例如下:
cam0: camera_model: pinhole intrinsics: [422.64066392524313, 424.02986182898763, 433.8337283244407, 239.28229368758497] distortion_model: equidistant distortion_coeffs: [0.3504343204199696, 0.09942954345832032, 0.06984316113464994, 0.06546342606600335] rostopic: /infra_left resolution: [848, 480] cam1: camera_model: pinhole intrinsics: [422.6846630997528, 424.22648250200166, 432.1283922008165, 239.61231361314714] distortion_model: equidistant distortion_coeffs: [0.34116697848102345, 0.14997256247725585, -0.035613030583661255, 0.12752761977350466] T_cn_cnm1: - [0.9999944120461245, -5.1892669972653565e-05, 0.0033426312493865813, -0.04991163289867289] - [5.4683759833798546e-05, 0.999999649965876, -0.0008349118544065274, 1.250629277077362e-05] - [-0.0033425867535462755, 0.0008350899766020524, 0.9999940648516464, -0.00011162780864553323] - [0.0,0.0,0.0,1.0] rostopic: /infra_right resolution: [848, 480]- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
gedit imu.yaml- 1
参数使用之前imu标定得到的参数,示例如下:
#Accelerometers accelerometer_noise_density: 2.0546933436785896e-02 #Noise density (continuous-time) accelerometer_random_walk: 1.0213093603518382e-03 #Bias random walk #Gyroscopes gyroscope_noise_density: 1.9035698029406516e-03 #Noise density (continuous-time) gyroscope_random_walk: 1.9530927686562762e-05 #Bias random walk rostopic: /imu #the IMU ROS topic update_rate: 200.0 #Hz (for discretization of the values above)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
参考链接:https://blog.csdn.net/qq_38364548/article/details/124917067
roslaunch mavros px4.launch roslaunch realsense2_camera rs_camera.launch- 1
- 2
关闭IR结构光
rosrun topic_tools throttle messages /camera/infra1/image_rect_raw 20.0 /infra_left & rosrun topic_tools throttle messages /camera/infra2/image_rect_raw 20.0 /infra_right & rosrun topic_tools throttle messages /camera/imu 200.0 /imu rostopic hz topic名可以查看实际频率。 rosbag record -O imu_stereo.bag /infra_left /infra_right /imu source /kalibr_workspace/devel/setup.bash rosrun kalibr kalibr_calibrate_imu_cameras --target april_6x6_A4.yaml --bag multicameras_calibration.bag --models pinhole-equi pinhole-equi pinhole-equi --topics /infra_left /infra_right /color --bag-from-to 10 100 --show-extraction --approx-sync 0.04- 1
- 2
- 3
- 4
- 5
- 6
- 7
-
相关阅读:
骑行运动耳机哪个好,五款最适合在骑行中佩戴的耳机分享
设计模式——单例模式(非常实用)
人工智能人工神经网络,神经元网络 人工智能
CI/CD docker compose 部署 humpback - single mode
云链商城连锁门店新零售O20系统以零售商城
java计算机毕业设计某高校学生成绩信息管理系统源码+程序+lw文档+mysql数据库
离职交接,心态要好
Java笔记(12)------JDBC
[PyTorch][chapter 58][强化学习-1]
C#调用Dapper
- 原文地址:https://blog.csdn.net/z1872385/article/details/126621326
