-
【软考学习6】计算机存储结构——局部性原理、Cache、主存地址单元、磁盘存取、总线和可靠性
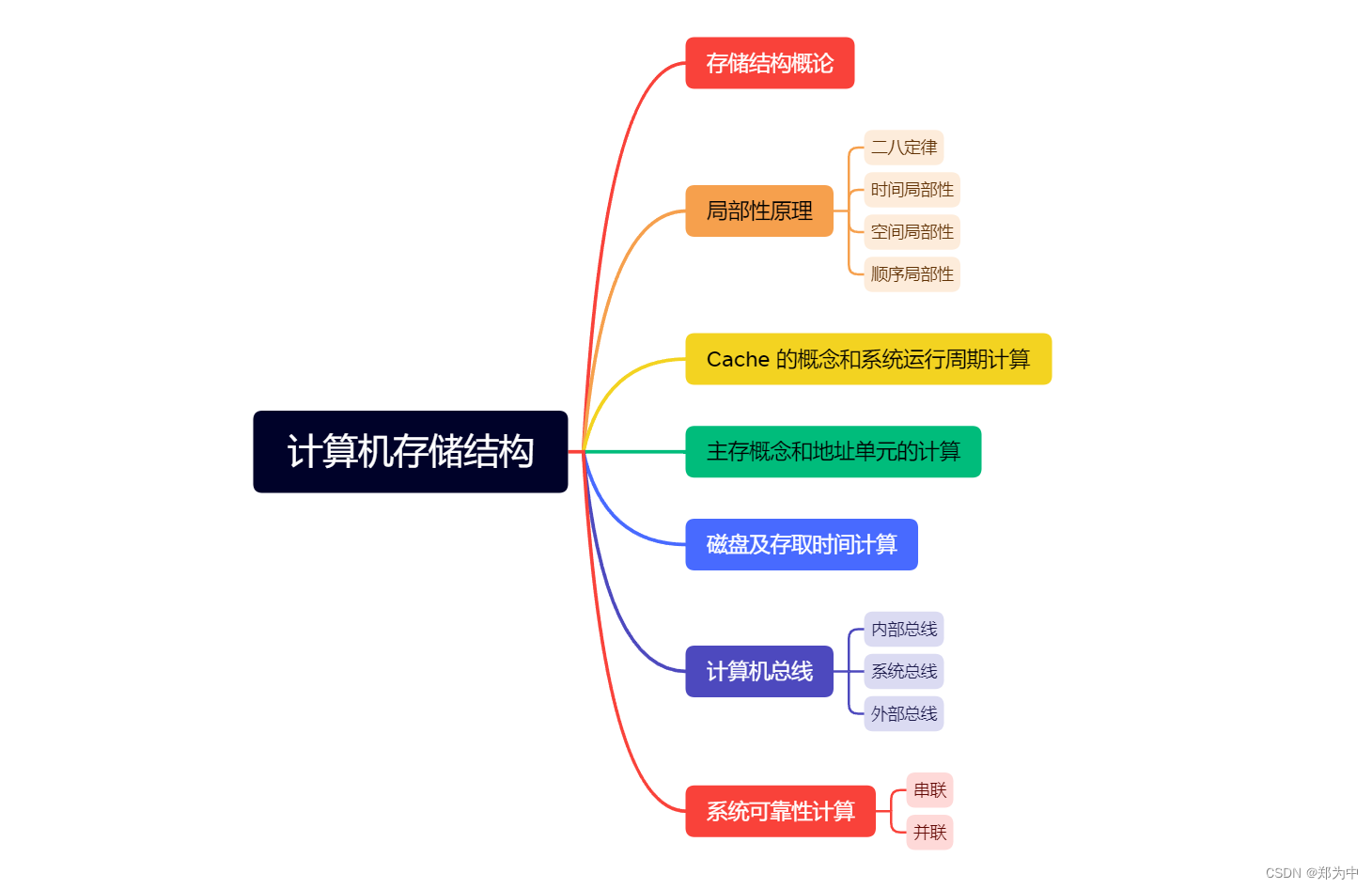
一、存储结构概论
计算机的存储机构包括了 CPU 的
寄存器,用于临时缓存指令数据,还有高速缓存 Cache、内存和外存,如下图所示。

- 寄存器:CPU 的寄存器一般在运算器和控制器中,作为一个临时缓存,一般的寄存器存储容量只有 1 - 64 KB 个大小。
- 高速缓存:又称 Cache,速度位于寄存器和内存之间,CPU 的寄存器在取指令操作时,先到 Cache 中查询,若有则直接返回,若没有才会到内存中读取,Cache 的存在可以加快 CPU 的执行效率,一般以 MB 作为计量单位。
- 内存:是计算机的运行内存,现代计算机的内存容量一般在 4G - 32G 范围内。
- 外存:是计算机系统的外部存储设备,如硬盘、U 盘等,现代外存的容量一般以 TB 作为计算单位。
二、局部性原理(Cache 的使用场景)
首先我们了解一下
二八定律,和我们即将学习的局部性原理很类似。帕累托法则又称二八定律,是一种量化的实证法,用以计量投入和产出之间可能存在的关系。
该定律的内容指出:20%的人口掌握了80%的社会财富,这个结论对大多数国家的社会财富分配情况都成立。因此,该法则又被称为80/20法则。举个例子:
假如20%购车的人买掉了80%的汽车,那么这部分人应该是汽车厂商注意的对象。
尽可能争取这20%的人来买,最好能进一步增加他们的购车消费。
汽车制造商出于实际理由,可能会忽视其余80%购车的人,因为他们的消费量只占20%。

2.1 时间局部性
对于计算机编程来说,
循环执行是再也正常不过的事情了,如下面的代码所示。public static void main(String[] args) { Integer sum = 0; for(int i = 1; i <= 100; i ++) { sum += i; } System.out.println(sum); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
要计算 1 到 100 的累加和,如果不用高斯定理,就只能这么循环去累加计算。
对于代码来讲,其实也就 7 行代码,但是对于计算机来说,
sum += i;这行程序要执行100次,而Integer sum = 0;这一初始化程序只会被执行一次,这就是时间局部性。时间局部性:如果一个信息项正在被访问,那么在近期它很可能还会被再次访问。
不仅仅是对于循环语句,对于堆栈类的程序也一样适用,比如
DFS 深搜。
2.2 空间局部性
空间局部性一般存在于
数组之上,比如我们需要对一个数组进行初始化,代码如下所示。public static void main(String[] args) { Integer[] array = new Integer[100]; for(int i = 0; i < 100; i ++) { array[i] = i; } System.out.println("Init Finish!"); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
首先创建
array数组对象后,拿到了对象的首地址。接着对
array[0]赋值的时候,就是对array对象的首地址赋值。接着对
array[1]赋值的时候,就是对array对象后的 4 个地址(Integer的占位大小)赋值。接着对
array[2]赋值的时候,就是对array对象后的 8 个地址(Integer的占位大小 * 2)赋值。以此类推,每给
array[n]赋值。就要进行4 * n顺序遍历,才能成功赋值。如果有一个缓存去临时存储当前的地址,是不是可以解决重复遍历的问题?
2.3 顺序局部性
当然还有一个
顺序局部性的概念,在典型程序中,除转移类指令外,大部分指令是顺序进行的。顺序执行和非顺序执行的比例大致是5:1。此外,对大型数组访问也是顺序的。指令的顺序执行、数组的连续存放等是产生顺序局部性的原因。
三、Cache 的概念和系统运行周期计算
Cache 存在的意义,就是提高 CPU 输入输出的速度,突破 CPU 和内存之间的存储上限。
因为计算机
局部性原理的存在,所以 Cache 的投入使用可以大大提高计算机的运行速度。简单来说,根据
局部性原理和二八定律,将 20% 常用的指令放在 Cache 中,可以达到加速 80%的效果。软考中对于 Cache 的考察有一类计算题,就是根据 Cache 的命中率,计算系统运行周期。
假设 Cache 的命中率为 X,不用 Cache (没有命中)的周期时间为 A,用了 Cache(命中)的周期时间为 B,那么使用
Cache + 内存模式的系统平均周期为多少?计算公式: 系统平均周期 =
X * A + (1 - X)* B。如:假设 Cache 的命中率为 95%,不用 Cache (没有命中)的周期时间为 50 纳秒,用了 Cache(命中)的周期时间为 9 纳秒,那么使用
Cache + 内存模式的系统平均周期为多少?系统平均周期 = 95% * 9 + (1- 95%) * 50 = 8.55 + 2.5 = 11.05(纳秒)。

四、主存概念和地址单元的计算
主存可分为两类,分别是
随机存取存储器和只读存储器。随机存取存储器还可以分为静态和动态,静态的是 SRAM,动态的是 DRAM。只读存储器包括磁盘,但不包括固态硬盘。
在主存模块中,会考察到地址单元的计算,公式如下。
地址单元 = 尾地址 - 首地址 + 1
比如内存首地址为 2,尾地址为 18,那么这块内存包含了 18 - 2 + 1 = 17个地址单元。
但题目一般都是十六进制,比如 内存地址从 BA235H 到 BC954H,求共有多少个地址单元。
首先对首位地址进行十六进制减法。
BC954H -BA235H ------- =02719H- 1
- 2
- 3
- 4
再将
02719H转为十进制。(9 x 16^0) + (1 x 16^ 1) + (7 x 16^ 2) + (2 x 16^3) = 9 + 16 + 1792 + 8192 = 10009- 1
答案就是一共有
10009个地址单元。第二问,如果该内存一共有
1000K个地址单元,按字节编址(16位),由28片存储器芯片构成,已知每片芯片有36K个,则每块芯片的每个存储单元存储几位?计算公式如下:
1000K * 16 = 28 * 36K * 存储单元位数 即 存储单元位数 = 28 * 36K / 16 / 1000K- 1
- 2
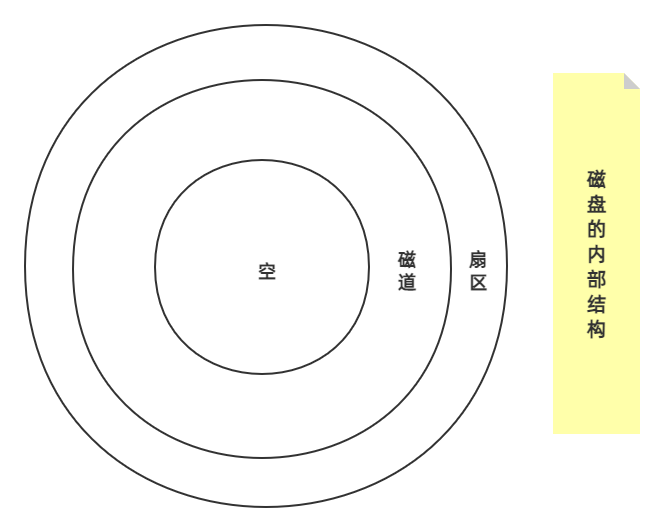
五、磁盘及存取时间计算
磁盘的物理构成如下图所示。
在对磁盘的数据进行一次存储时,需要消耗一定的时间,我们称为磁盘存取时间。这个
磁盘存取时间可分为两部分,一个是寻道时间,还有一个是等待时间。在 360° 的磁道上,必定有一个
磁头,可以理解为一个数组的首元素指针。寻道时间指的是磁头移动到磁道所需的时间,我们设为 X。等待时间指的是等待扇区转到磁道所用的时间,我们设为 Y。接下来以一个实际例题来演示。
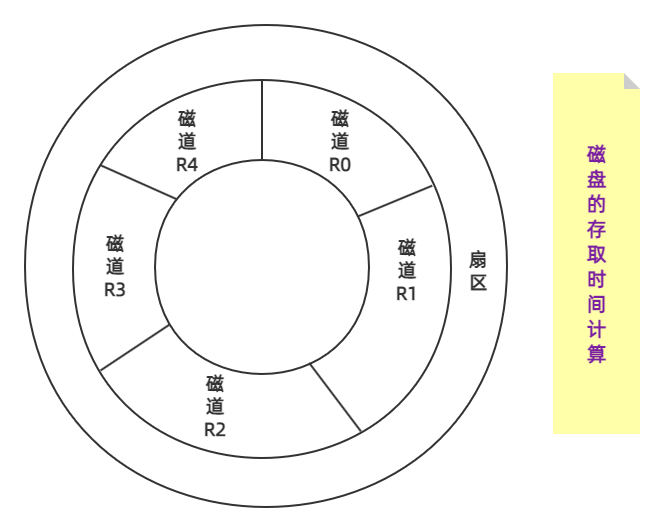
题目:
如果磁盘的旋转周期为 25 毫秒,磁头处于 R0 的开始处。若系统采用单缓冲区处理这些记录,每个记录的处理时间为 6 毫秒,则处理这
5 个记录的最长时间为多少毫秒?
磁盘的旋转周期为
25毫秒,磁道一共分为5块,所以得出每个单位的磁道旋转读取需要消耗5毫秒时间。首先 磁头从
R0开始,读取R0的数据需要5毫秒,接着磁头移动到R1的开始处,如下图所示。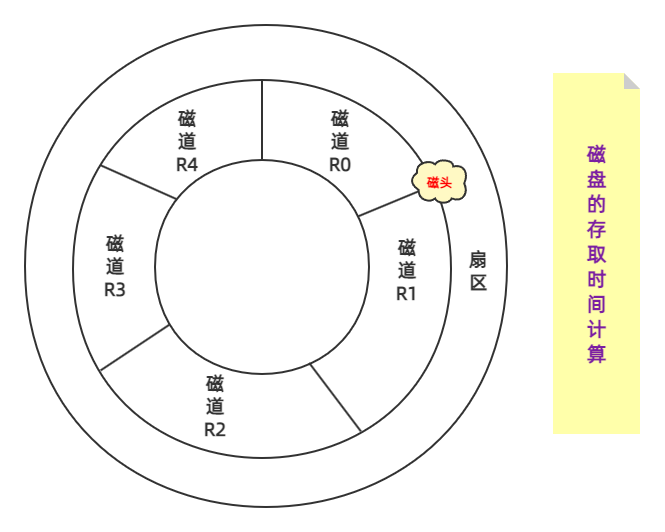
此时需要处理磁道R0的数据,处理的时间为6毫秒,磁盘开始处理R0的数据,但磁头继续移动(不会停),等磁盘处理好R0的数据后,磁头移动情况如下图所示。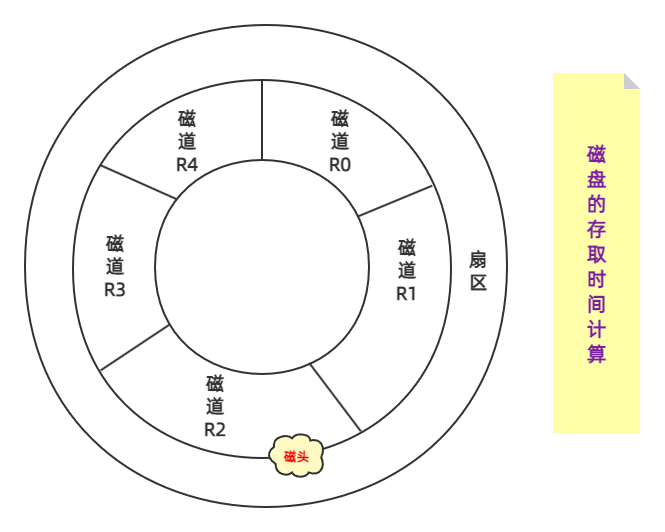
磁盘接着要处理R1的数据,但磁头已经超过了R1,无法读取,只能等磁头再转一圈,这就叫“过犹不及”!等磁头再次转到
R1起始位置时,消耗的时间为读取R0的5毫秒 + 处理R0的6毫秒 + 磁头从上图到R1起始处的时间,即5 + 6 + 19,等于30毫秒,接着磁头又到了如下图所示的位置。
接着对于R1以此类推,读取需要5毫秒(25 的旋转周期分 5 份),处理需要6毫秒,处理后磁头位置如下图所示。
同理可得完成R1处理的时间同R0,也是30纳秒,R0到R4都是这样。所以最终的存取时间等于
30 x 5 = 150毫秒。
六、计算机总线
计算机总线的分类,如下图所示。
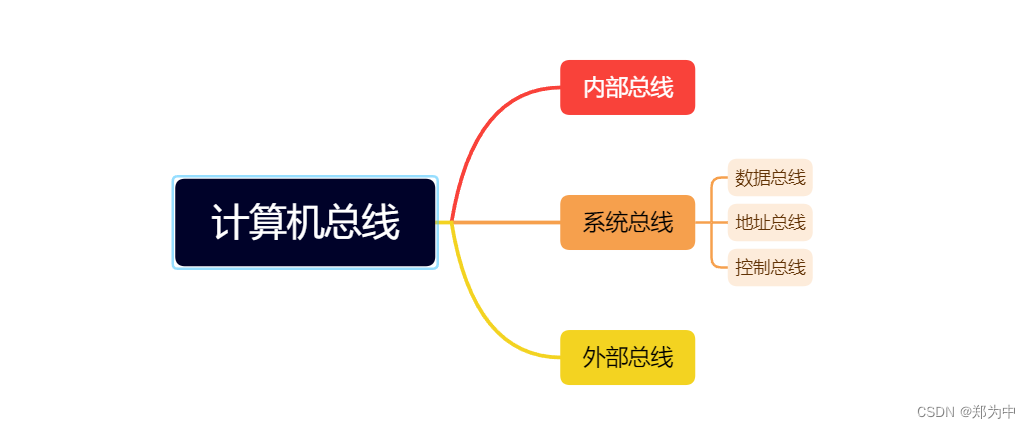
- 内部总线:寄存器和寄存器之间的连接、芯片内部的连接、寄存器和运算器 / 控制器之间的连接。
- 系统总线:CPU、内存之间的连接。
- 外部总线:主机和鼠标、键盘、麦克风等外部设备的连接。
其中系统总线中的分为
数据总线、地址总线和控制总线,它们的功能分别如下所示。数据总线:双向传输,和机器字长、存储字长有关。
地址总线:单向传输,和存储地址、I/O地址有关。
控制总线:用于发出信号(存储器读、存储器写、总线允许、中断确认等操作);接收信号(中断请求、总线请求等操作)
七、系统可靠性计算
系统可靠性需要区分
串联和并联,对于两者有不同的计算公式。串联
串联的情况如下图所示,分系统 R1、R2、R3 和 R4 用串联的方式连接。

假设系统 R1 的可靠性为 A1,设系统 R2 的可靠性为 A2,设系统 R3 的可靠性为 A3,设系统 R4 的可靠性为 A4。这个串联系统的可靠性为 R1 x R2 x R3 x R4。
计算公式为: R1 x R2 x … x Rn。
误差率计算公式为:(1 - R1)x(1 - R2)x … x(1 - Rn),仅供参考,误差率较大。
并联
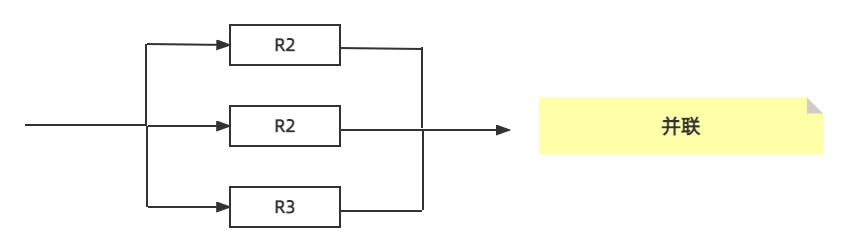
假设系统 R1 的可靠性为 A1,设系统 R2 的可靠性为 A2,设系统 R3 的可靠性为 A3。那么这个并联系统的可靠性 R = 1 - (1 - R1)x (1 - R2)x (1 - R3)x … x (1 - Rn)。
八、总结
本文对软考计算机存储结构进行了复习,包括存储结构概论、局部性原理、Cache 高速缓存、主存地址单元、磁盘存取、计算机总线和串并联的系统可靠性。
-
相关阅读:
软件工程毕业设计课题(7)基于python的毕业设计python外卖点餐系统毕设作品源码
【Python零基础入门篇 · 6】:Python中的注释、字符串的常见操作、对象的布尔值
Linux -- 使用多张gpu卡进行深度学习任务(以tensorflow为例)
最新的Cesium和Three的整合方法(附完整代码)
单链表的创建定义
阿里P8大牛带你深入理解SpringCloud微服务构建文档
计算机视觉系列-轻松掌握 MMDetection 中 全景分割算法 MaskFormer(二)
算法入门——归并排序、希尔排序
计算机毕业设计ssm软件项目Bug管理系统612ed系统+程序+源码+lw+远程部署
B端系统:导航机制设计,用户体验提升的法宝
- 原文地址:https://blog.csdn.net/qq_41464123/article/details/126596446