-
【计算机视觉】尺度不变特征变换(SIFT)
1. SIFT简介
-
Sift(尺度不变特征变换Scale Invariant Feature Transform):Sift提取图像的局部特征,在尺度空间寻找极值点,并提取出其位置、尺度、方向信息。
-
Sfit的应用范围:物体辨别、机器人地图感知与导航、影像拼接、3D模型建立、手势识别、影像追踪等
分别提取待拼接图片的特征点、拟合透视矩阵得到不同场景下的同一物体
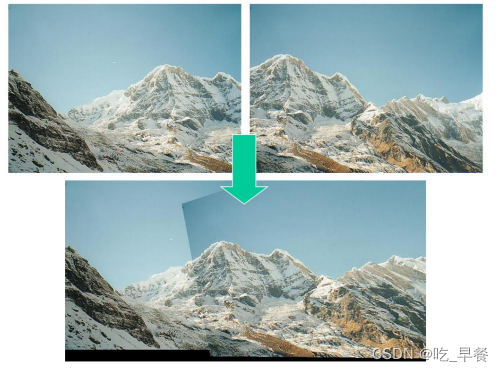
将两个图片中的相似点进行连接

-
Sift特征的特点
- 对视角变化、噪声等也存在一定程度的稳定性;
- 独特性,信息量丰富,适用于在海量特征数据中进行快速,准确的匹配;
- 多量性,即使少数几个物体也可以产生大量的Sfit特征向量;
-
Sfit算法实质:在不同的尺度空间上查找关键点(特征点),计算关键点的大小、方向、尺度信息,利用这些信息组成关键点对特征点进行描述的问题。Sift所查找的关键点都是一些十分突出,不会因光照,仿射变换和噪声等因素而变换的“稳定”特征点,如角点、边缘点、暗区的亮点以及亮区的暗点等。
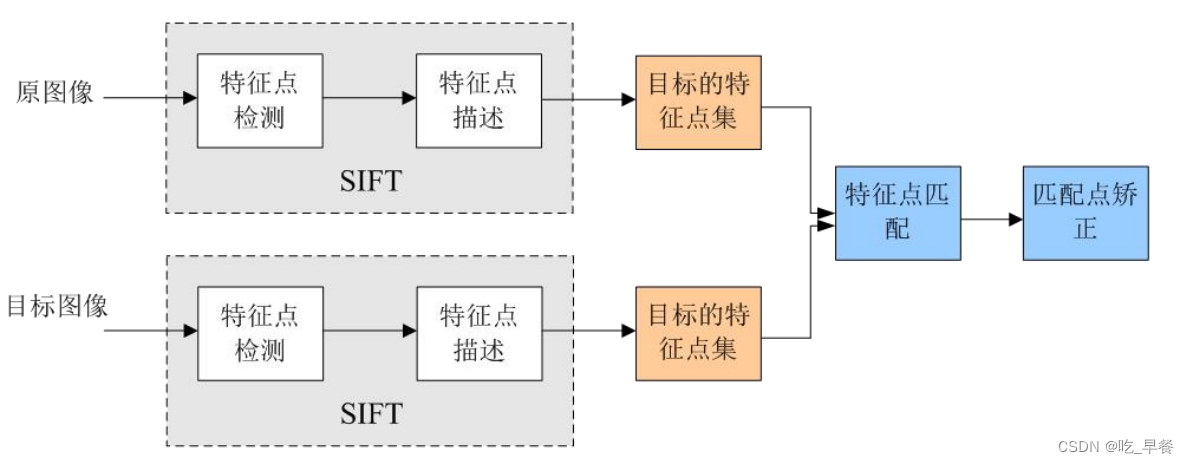
2. SIFT特征提取和匹配具体步骤
匹配的过程就是对比这些特征点的过程:
SIFT函数注册了专利,在商业用途上是收费的。将在opencv > 3.4.3中,不再提供。
解决办法: (先下载python3.6才能支持低版本的opencv)
conda create --name py3.6 python=3.6 #创建python3.6环境 conda activate py3.6 #进入该环境 pip install opencv-python==3.4.1.15 #安装opencv pip install opencv-contrib-python==3.4.1.15 #安装opencv的其他包- 1
- 2
- 3
- 4
SIFT特征提取和匹配具体步骤 如下6步
-
生成高斯差分金字塔(DOG金字塔),尺度空间构建
-
空间极值点检测(关键点的初步查探)
-
稳定关键点的精确定位
-
稳定关键点方向信息分配
-
关键点描述
-
特征点匹配
2.1 生成高斯差分金字塔 尺度空间构建
尺度空间与图像金字塔关系
- 尺度空间解释:试图在图像领域中模拟人眼观察物体的概念与方法。例如:观察一颗树,关键在于我们想要观察是树叶子还是整棵树:如果是一整棵树(相当于大尺度情况下观察),那么就应该去除图像的细节部分。如果是树叶(小尺度情况下观察),那么就该观察局部细节特征。
- 尺度空间:相当于一个图片需要获得多少分辨率的量级。
- 图像金字塔:如果把一个图片从原始分辨率不停的对其分辨率进行减少,然后将这些图片摞在一起,可以看成一个四棱锥的样式,这个东西就叫做图像金字塔。
- 图像金字塔解释:图像金字塔是一种以多分辨率来解释图像的结构,通过对原始图像进行多尺度像素采样的方式,生成N个不同分辨率的图像。把具有最高级别分辨率的图像放在底部,以金字塔形状排列,往上是一系列像素(尺寸)逐渐降低的图像,一直到金字塔的顶部只包含一个像素点的图像,这就构成了传统意义上的图像金字塔。
- 关系:尺度空间构建的基础是DOG金字塔,DOG金字塔构建的基础是高斯金字塔。
获得图像金字塔一般包括二个步骤:
-
利用滤波器平滑图像 (高斯滤波) ——这一步主要是进行降噪
-
对平滑图像进行抽样(采样)
有两种采样方式——上采样(分辨率逐级升高)和下采样(分辨率逐级降低)
2.1.1 高斯金字塔
-
主要思想:通过对原始图像进行尺度变换,获得图像多尺度下的尺度空间表示序列,对这些序列进行尺度空间主轮廓的提取,并以该主轮廓作为一种特征向量,实现边缘、角点检测不同分辨率上的关键点提取等。 各尺度下图像的模糊度逐渐变大,能够模拟人在距离目标由近到远时目标物体在视网膜上的形成过程。
-
注意:高斯金字塔是在SIFT中提出来的概念,首先高斯金字塔并不是一个金字塔,而是有很多组(Octave)金字塔构成,并且每组金字塔都包含若干层(Interval)。
-
高斯金字塔构建过程:
-
先将原图像扩大一倍之后作为高斯金字塔的第1组第1层,将第1组第1层图像经高斯卷积(其实就是高斯平滑或称高斯滤波)之后作为第1组金字塔的第2层。
-
将σ乘以一个比例系数k,得到一个新的平滑因子
σ=k*σ,用它来平滑第1组第2层图像,结果图像作为第3层。 -
如此这般重复,最后得到L层图像,在同一组中,每一层图像的尺寸都是一样的,只是平滑系数不一样。它们对应的平滑系数分别为:0,σ,kσ,k2σ,k3σ……k^(L-2)σ。
-
将第1组倒数第三层图像作比例因子为2的降采样(比例因子为2也就是图片的尺寸减半),得到的图像作为第2组的第1层,然后对第2组的第1层图像做平滑因子为σ的高斯平滑,得到第2组的第2层,就像步骤2中一样,如此得到第2组的L层图像,同组内它们的尺寸是一样的,对应的平滑系数分别为:0,σ,kσ,k2σ,k3σ……k^(L-2)σ。但是在尺寸方面第2组是第1组图像的一半。
高斯卷积的公式如下:(其中σ一般取1.6为最佳)
G ( x , y ) = 1 2 π σ 2 e − ( x − x 0 ) 2 + ( y − y 0 ) 2 2 σ 2 G(x,y)=\frac{1}{2πσ^2}e^{-\frac{(x-x_0)^2+(y-y_0)^2}{2σ^2}} G(x,y)=2πσ21e−2σ2(x−x0)2+(y−y0 -
-
-
相关阅读:
C++ 注释
支持中文!秒建 wiki 知识库的开源项目,构建私人知识网络
Day35 贪心算法part04
记一次 .NET某汽车零件采集系统 卡死分析
【解决】openeuler22部署k8s提示/opt/cni/bin缺少资源问题
计算机Android毕业设计论文基于Uniapp+SSM实现的Android安全网购平台
信贷风控也要学|智能推荐系统的应用
docker搭建私有仓库并推送本地镜像
Whois查询结果中不同域名状态的含义
NX二次开发后处理中保存tcl变量值到文本
- 原文地址:https://blog.csdn.net/m0_52923241/article/details/126609403