-
【Reinforcement Learning】策略学习
强化学习最主要的两种方式之一,策略学习的究竟是怎么回事?此处笔记根据B站课程,王树森老师的强化学习记录而来。3.深度强化学习(3_5):策略学习 Policy-Based Reinfor(Av374239425,P3)_哔哩哔哩_bilibili
Policy-based Reinforcement Learning 策略学习
1.回顾策略函数
策略学习的本质就是使用一种方式来近似策略函数Π(a|s), Policy Function Approximation
Policy Function Π(a|s) ,其是一个概率密度分布PDF,使用网络来近似策略函数,则输入是state s,输出是该条件下各个动作的概率,根据概率进行随机抽样,选择下一个action。在这个过程中,Π(a|s)控制agent做出反应。
想要让agent玩超级玛丽这样的游戏,并不能把所有的状态和动作记录下来,所以我们要做函数近似,学习一个函数近似策略函数,近似的方法是多种多样的。
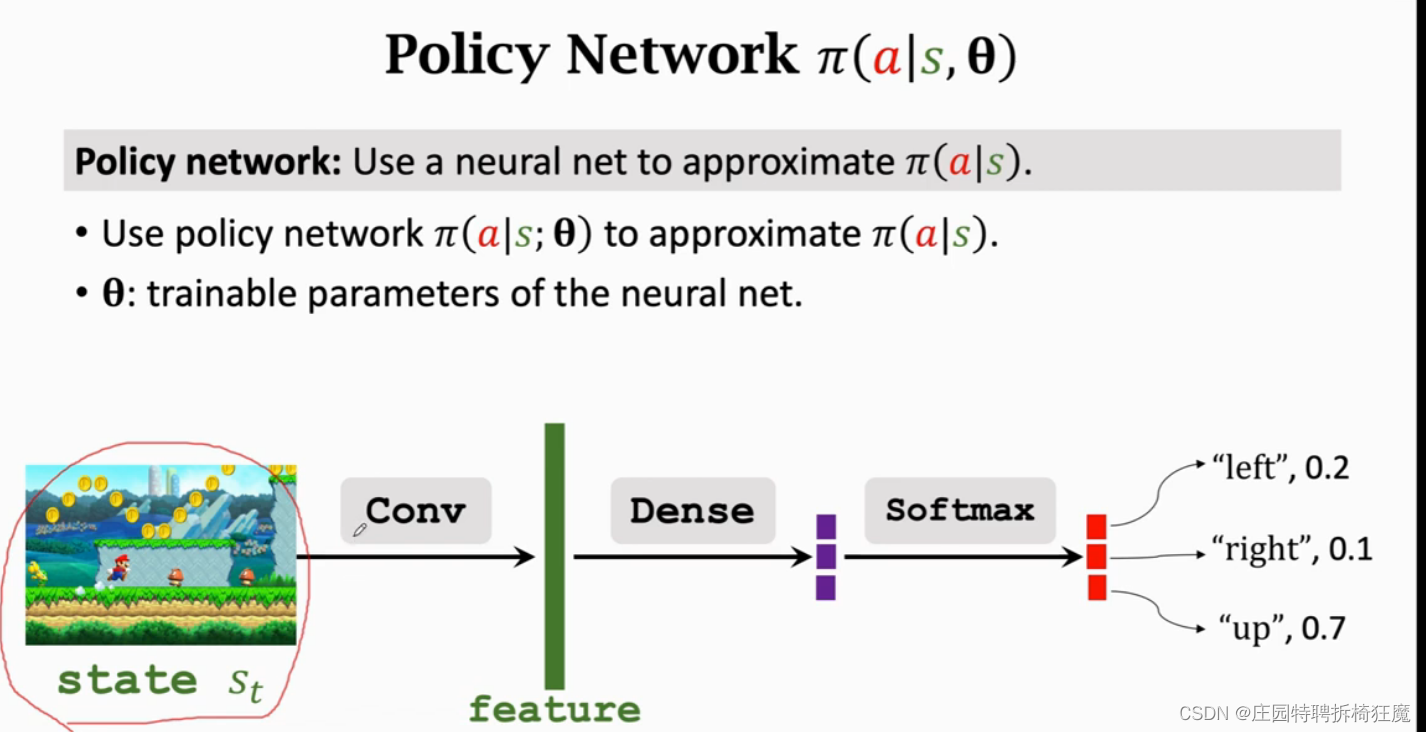
策略网络,Policy Network,使用一个神经网络近似Π(a|s)
Model Π(a|s;θ) ————近似——>Π(a|s),其中θ是要学习的参数。
由于Π是概率密度函数PDF,所以有性质:

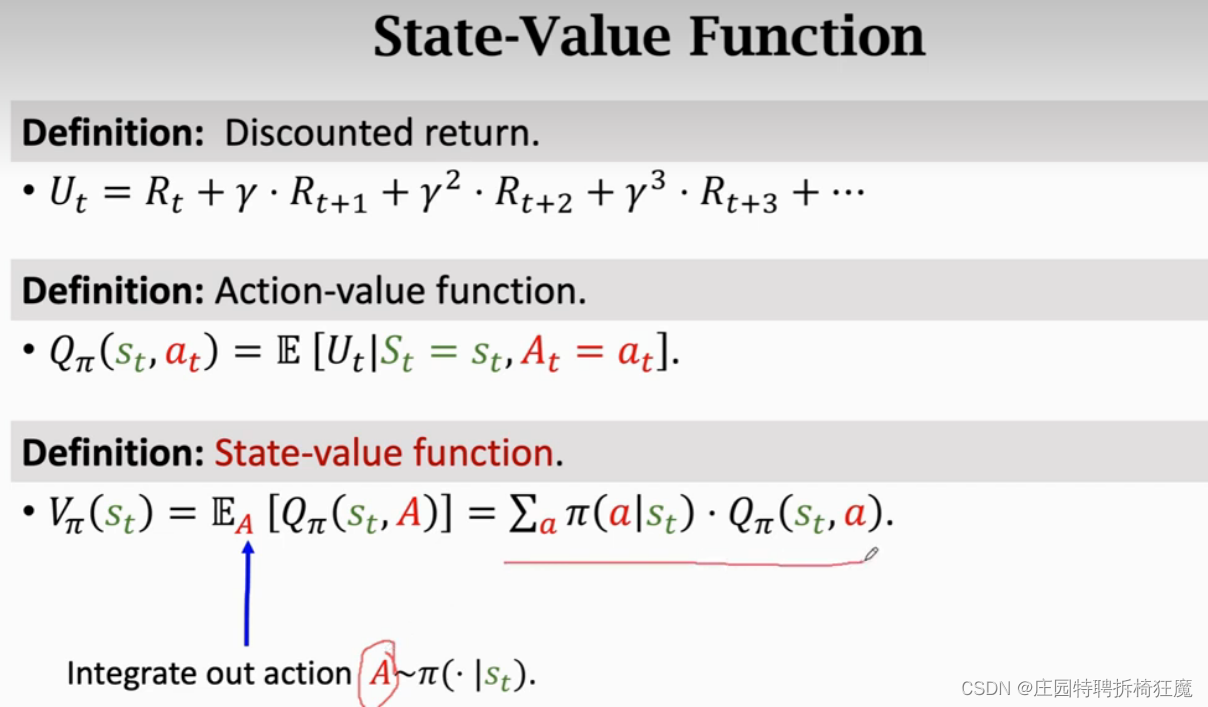
已知动作价值函数QΠ,在其基础上,去除策略Π的影响,得到状态价值函数VΠ,可以评价当前状态的好坏,也能评价策略policy Π的好坏,VΠ越大,说明policy Π越好。
2.Policy-base Reinforcement Learning策略基础的强化学习
使用神经网络来代替策略函数Π,该神经网络就叫做策略网络。

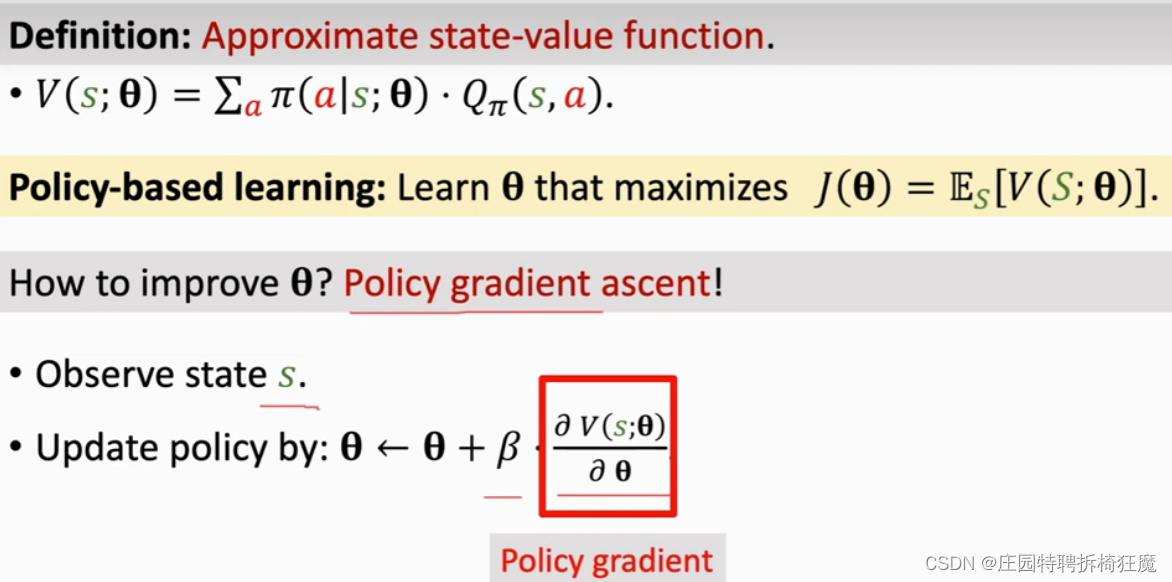
为了使V(s;θ) 足够大,我们调整θ的值,其中V(S;θ)对S求期望,则J(θ)就只与θ的值相关。当观测到状态s时,使用策略梯度更新θ的值。这里使用的是梯度上升,实际就是随机梯度,随机性来自s,目标是让J(θ)越来越大。
这里的梯度并不是真正的梯度,真正的梯度是目标函数(价值)关于θ的导数,这里只是VΠ(状态转移函数)关于θ的导数。
3.策略梯度如何计算?Policy Gradient
V(s,θ)是对state-value function的近似,梯度是V对θ的导数,推到过程大致如下:

这里做一个假设,QΠ不依赖于θ,这个假设是为了简单理解,并不严谨,因为QΠ是依赖于θ的。

在此处得到了策略梯度计算的第一个公式,但实际应用中并不这么用,都是使用蒙特卡洛近似。因为Π在这里是复杂的神经网路,并不能简单的计算积分。
 接下来做蒙特卡洛近似:从上往下推不太好推,但是可以从下往上验证:使用链式法则
接下来做蒙特卡洛近似:从上往下推不太好推,但是可以从下往上验证:使用链式法则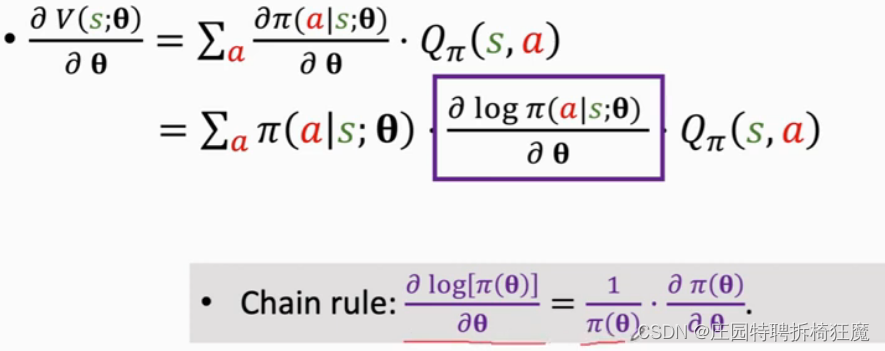

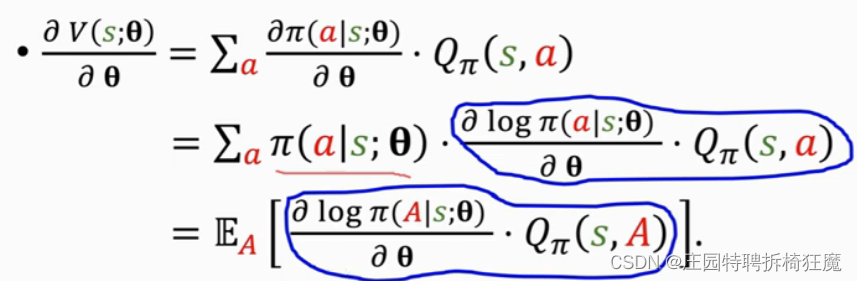
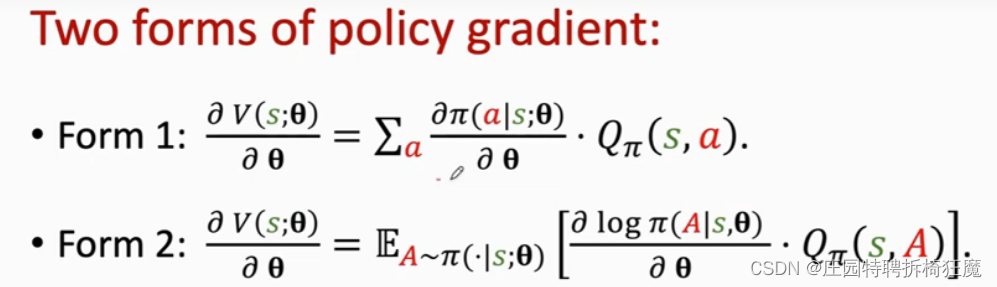
因此得到策略梯度的两种等价形式:
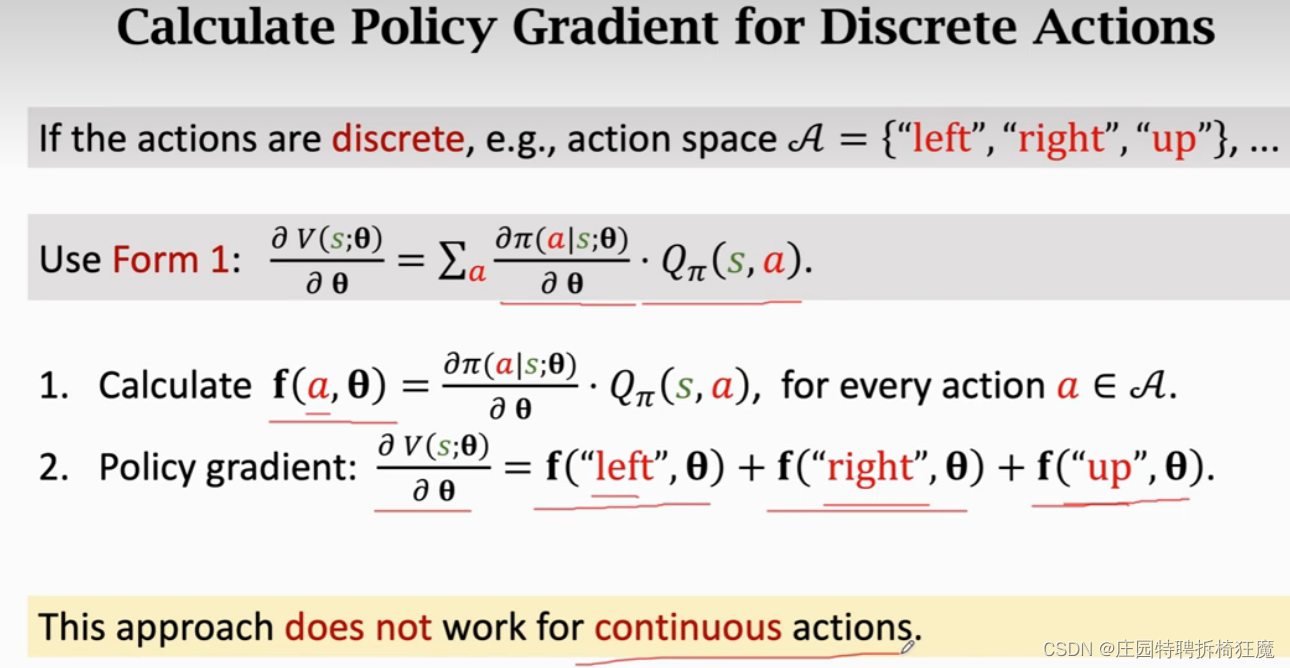
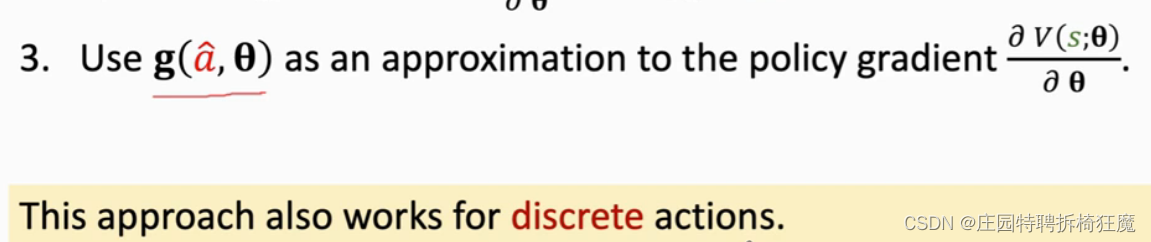
3.计算策略梯度函数:离散、连续

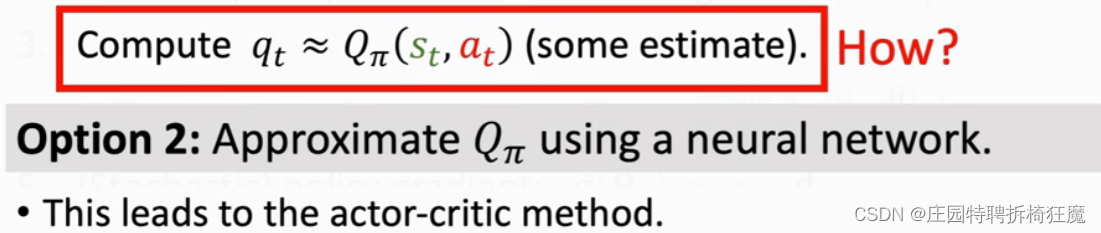
4.算法:
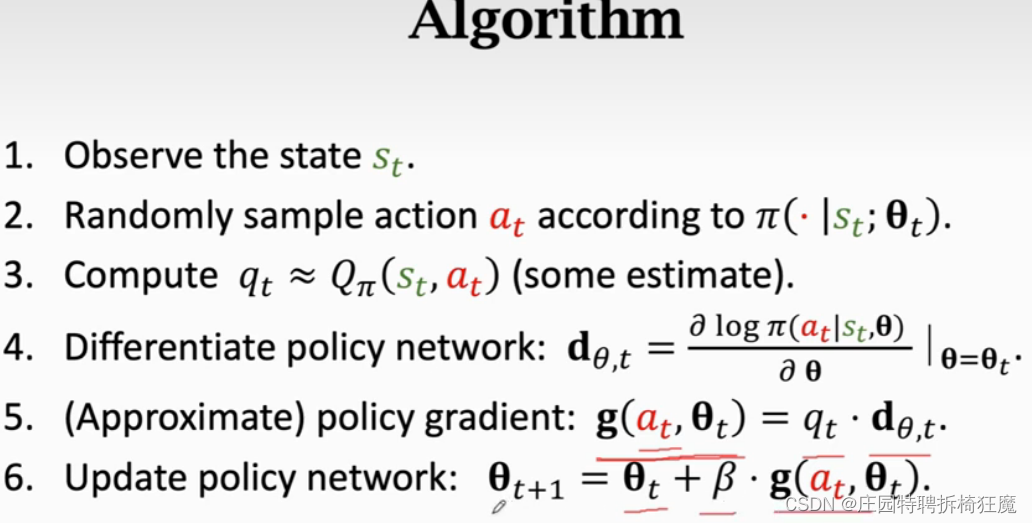
如何计算qt,有两种方式:第一种方式用u(t)替代QΠ函数,需要玩完一局游戏,观测到所有奖励,才能更新网络。另一种方式是使用神经网络近似QΠ,这样就有两个神经网络,一个近似Π,一个近似QΠ,叫做actor-critic模型。

Summary

-
相关阅读:
腾讯:《智能科技 跨界相变——2024数字科技前沿应用趋势》
【TypeScript】常见的设计模式
vue3中如何实现通过点击不同的按钮切换不同的页面
极光笔记 | 极光服务的信创改造实践
【嵌入式】嵌入式系统稳定性建设:最后的防线
HTML+CSS+JavaScript仿京东购物网站制作 html静态网页设计制作 dw静态网页成品模板素材网页 web前端网页设计与制作 div静态网页设计
基于MATLAB的Kmeans聚类算法的仿真与分析
托盘四向车货架|海格里斯如何保证托盘四向穿梭车货架系统可以高效运转?
【最优化方法】实验三 无约束最优化方法的MATLAB实现
一、2023.9.27.C++基础.1
- 原文地址:https://blog.csdn.net/lt_BeiMo/article/details/126590593