-
电气比例阀外接压力传感器和PID控制器实现微正压0.1%的超高精度控制
摘要:本文针对工业和仪表行业对超高精度0.1%的微正压控制以及低成本要求,提出了有效的解决方案。整体方案基于电气比例阀,通过外接超高精度的压力传感器和PID控制器,在发挥电气比例阀优势的同时,可大幅提高压力控制精度,并将整体成本控制在较低水平。本文还介绍了此解决方案的考核试验验证结果,证明微正压控制完全可以达到0.1%的超高精度。
原文阅读:(PDF格式)
一、问题的提出
在生物医药和半导体行业,往往需要对微正压有很高的要求,要求在略高于一个标准大气压的微正压条件下压力控制达到0.1%的超高精度。目前在微正压超高精度控制技术中,存在以下两方面的问题:
(1)很多微正压控制都是直接采用电气比例阀,但受内置的压力传感器和控制器精度限制,电气比例阀根本无法满足超高精度的压力控制要求。
(2)在计量校准测试领域,为了提高压力控制精度,往往会采用超高精度的分体结构,即采用独立的压力传感器、数据采集器、数据控制器和微计算机处理器形成闭环控制回路。尽管这种方式可以达到非常高的精度(如0.01%),但总体造价很高,不适用于工业和仪器仪表行业。
为此,本文针对工业和仪表行业对超高精度0.1%的微正压控制以及低成本要求,提出更有效的解决方案。整体方案还是基于电气比例阀,通过外接超高精度的压力传感器和PID控制器,在发挥电气比例阀优势的同时,大幅提高压力控制精度,并将整体成本控制在较低水平。本文还介绍对此解决方案的考核试验验证结果,证明此方案完全可以实现微正压0.1%的超高精度控制。
二、解决方案
如图1所示,具体解决方案是基于电气比例阀,通过外接更高精度的压力传感器和PID控制器,形成闭环PID控制回路,实现达到0.1%超高精度的微正压控制。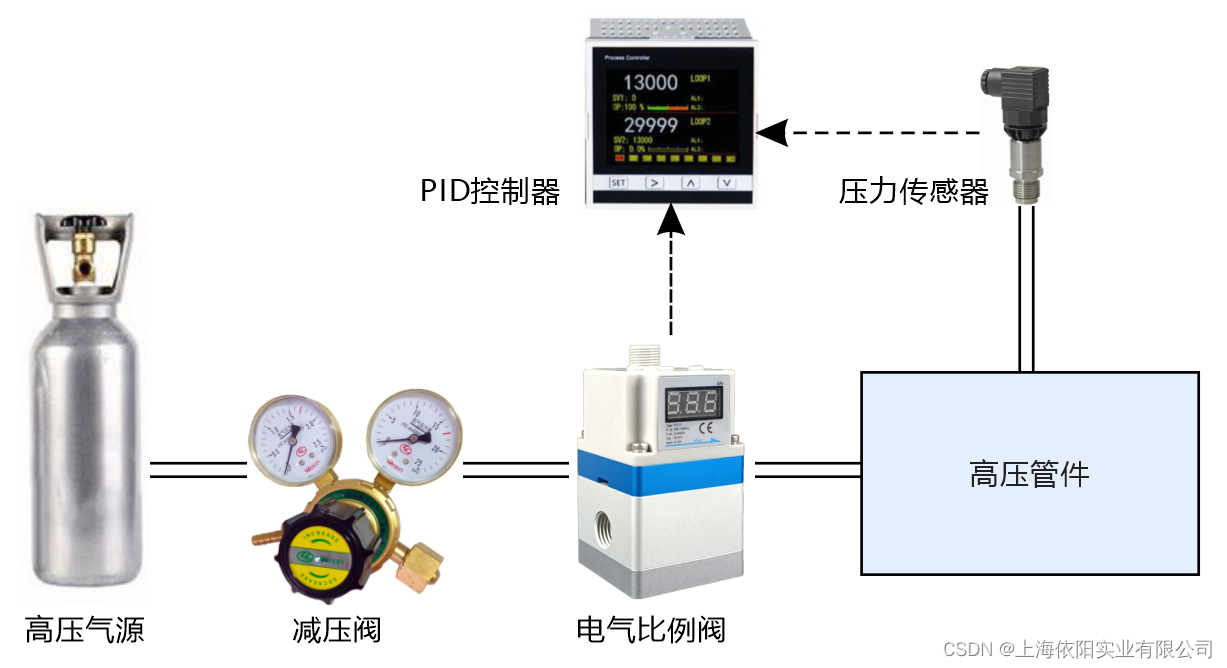
图1 微正压0.1%超高精度压力控制解决方案示意图 此解决方案的特点是将电气比例阀作为执行器,而超高精度的控制则需要外接更高精度的压力传感器和PID控制器。
根据我们前期进行的考核试验以及控制过程数据分析,我们得出的结论是将工业用集成式PID控制器仪表要实现0.1%的控制精度,需要满足以下几方面的技术指标:
(1)外置传感器要有0.1%以上的超高精度。
(2)外置执行器(电气比例阀)也需要具有较高的精度,但不一定要求达到0.1%的超高精度,总体精度能达到1%极可,主要是使用的电气比例阀的分辨率指标。
(3)PID控制器的ADC位数至少需要达到16位,最佳是24位。
(4)PID控制器的浮点运算要保证输出百分比具有0.01%~0.05%的调节能力。
(5)PID控制器的DAC位数至少需要达到14位,最佳是16位。
从上述对技术指标的要求以及试验结果可以看出,为了实现超高精度压力控制,在外置压力传感器、电气比例阀和PID控制器ADC满足精度要求的前提下,PID控制器的DAC控制输出和浮点运算必须也要具有足够的精度,即PID控制器输出的最小百分比必须有0.01%的能力。
基于上述分析,解决方案中的硬件配备主要包括以下几部分内容:
(1)压力传感器:精度0.05%,量程为绝压0.1~1MPa,对应电压输出为0~10V。
(2)电气比例阀:最大输入气体压力300kPa,设定压力控制范围0~100kPa,外部模拟量输入信号0~10DVC,直线性小于±0.7FS,重复精度小于±0.4%FS,迟滞小于0.3%FS。
(3)PID控制器:ADC为24位,DAC为16位,ADC量程为0~10V,DAC量程为0~10V,模拟量控制最小输出百分比为0.01%。
三、考核试验装置
为考核上述解决方案的有效性,按照上述配置搭建了考核试验装置,如图2所示。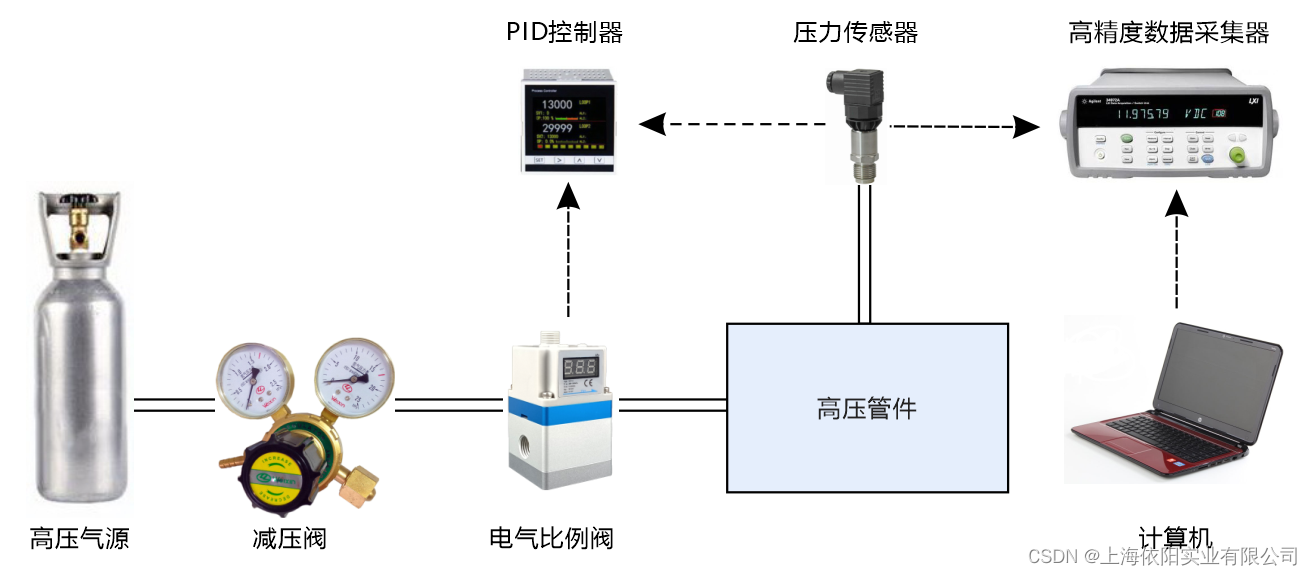
图2 微正压超高精度控制考核试验装置结构示意图 为有效采集、监视和存储考核试验数据,在图2的考核试验装置中增加了以下内容:
(1)多通道数据采集器:安捷伦34972A,五位半/六位半采集。
(2)高压管件:用作压力容器,并连接压力传感器和电器比例阀。
(3)计算机:用于与PID控制器和数据采集器进行通讯,并安装和运行相应的软件程序对PID控制器和数据采集器进行控制、数据采集、曲线显示和数据存储。
按照上述解决方案搭建的考核试验装置如图3所示。
图3 微正压超高精度压力控制考核试验装置 四、考核试验结果
通过上述搭建完成的试验装置,在表压0~100kPa范围内进行了压力恒定控制试验。压力设定点分别为间隔10kPa的十个设定值,整个试验过程的测试曲线如图4所示。
为便于观察PID控制器的输出百分比和控制电压对压力恒定控制的影响以及对应关系,图4中还显示了所采集到的PID控制器的控制电压信号。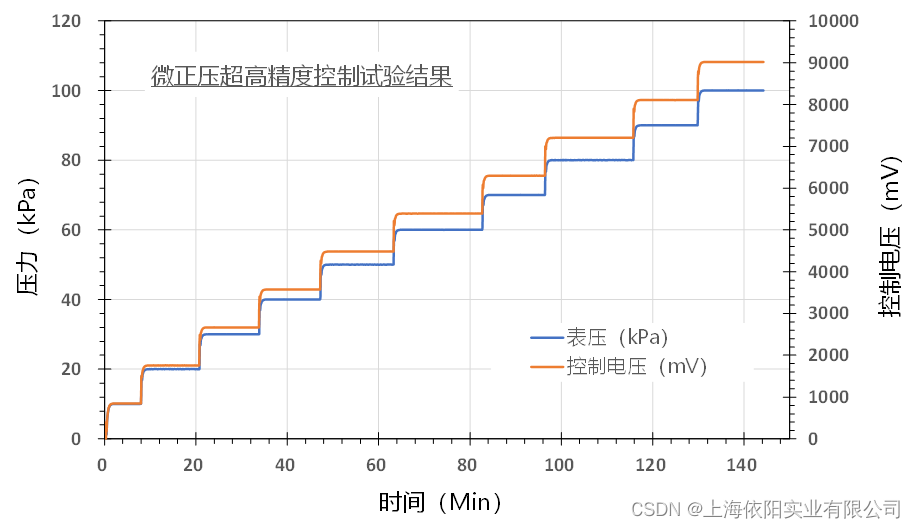
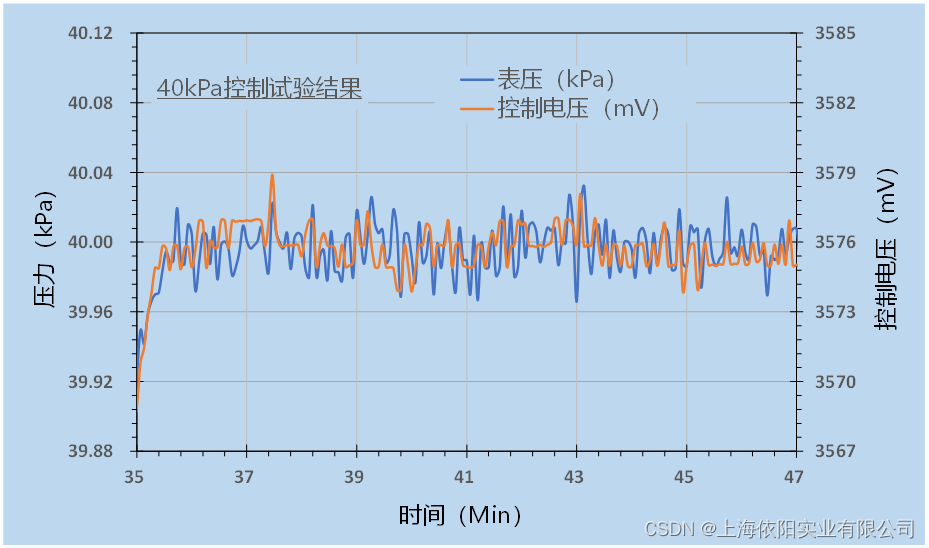
图4 不同压力设定点恒定控制时的压力和控制电压试验曲线 为直观和准确评价上述多个压力设定点的控制精度,将图4所示的试验结果在各个压力控制点上进行单独的局部放大显示,所对应的十个压力控制点下的控制曲线如图5所示。

图5 不同压力设定点恒定控制时的压力和控制电压曲线 图5所示的考核试验曲线是仅通过控制器PID参数自整定后进行控制得到结果,从这些考核结果可以得出以下结论:
(1)在10kPa和20kPa两个设定点时,压力控制的波动率分别为±0.3%和±0.2%范围内。
(2)从30kPa之后的较高压力范围内,波动率可以稳定控制在±0.1%以内。特别是在50kPa之后,波动率甚至可以稳定控制在±0.05%以内。
(3)观察整个压力范围的控制过程,可以发现在压力控制稳定后,控制器输出百分比的变化幅度基本都是±0.01%。由此说明采用16位DAC和增加浮点运算精度对提高控制精度的效果非常明显。
(4)在低量程20kPa压力范围内,采用自整定PID参数进行控制可以达到0.2~0.3%的波动率,而如果进行控制参数的简单优化,可以将波动率控制在±0.1%以内,但前提是环境温度稳定和压力传感器在此低压范围内需要具有足够高的测量精度。
五、结论
通过上述解决方案和考核试验结果,证明了此解决方案完全能够对微正压实现0.1%超高精度的压力控制,具体结论如下:
(1)外置超高精度的压力传感器和PID控制器,完全可以有效提高电气比例阀的压力控制精度,可实现0.1%超高精度的压力控制。
(2)超高精度0.1%的压力控制过程中,PID控制器的测量精度、控制精度和浮点运算是决定整体控制精度的关键技术指标,本文所述解决方案中采用了24位ADC、16位DAC和高精度浮点运算0.01%的输出百分比,证明完全可以满足超高精度的控制需要。
(3)通过本文的解决方案和试验验证,证明了工业用0.1%超高精度PID控制器完全可以在较低造价的同时,同样能实现超高精度控制。
(4)本文的解决方案具有很大的灵活性,可选择不同量程的压力传感器和电气比例阀,通过通用型的超高精度PID控制器,可实现不同压力范围内的超高精度控制。
Ultra High Precision PID Control with Micro-Positive Pressure Below 0.1MPa and Its Demonstration and Verification Results
Abstract:Aiming at the requirements of micro-positive pressure control with ultra-high precision of 0.1% and low cost in industry and instrument industry, this paper puts forward an effective solution. The whole scheme is based on the electric proportional valve. By connecting the ultra-high precision pressure sensor and PID controller, the advantages of the electric proportional valve can be brought into play, the pressure control accuracy can be greatly improved, and the overall cost can be controlled at a low level. This paper also introduces the verification results of this solution, which proves that the micro-positive pressure control can achieve the ultra-high accuracy of 0.1%.

-
相关阅读:
【lesson14】进程控制之进程终止
JavaScript-DOM
LeetCode HOT 100 —— 23.合并K个升序链表
程序猿的中秋原来可以这样过
点云从入门到精通技术详解100篇-基于路侧激光雷达的交通目标感知方法与实现(下)
URLConnection程序报java.net.ConnectException: Connection refused: connect
python开发之个微机器人的二次开发
成员变量为动态数据时不可轻易使用
2022年SQL大厂高频实战面试题(详细解析)
307 周赛t4/85 双周赛t4复盘 6155/6159
- 原文地址:https://blog.csdn.net/Shanghai_Eyoung/article/details/126579794