-
顺序二叉树(堆)与链式二叉树的C语言实现
树的概念及结构
树的概念
树是一种非线性的数据结构,它是由n(n>=0)个有限节点组成一个具有层次关系的集合。把它叫做树是因为它看起来像一颗倒挂的树,也就是说它树根朝上,而叶朝下的。

- 有一个特殊的节点,称为根节点,根结点没有前驱结点。
- 除根结点外,其余节点被分成M(M>0)个互不相交的集合T1、T2、……、Tm,其中每一个集合Ti(1 <= i <= m)又是一颗结构与树类似的子树。每棵子树的根结点有且只有一个前驱,可以有0个或多个后继。
- 因此,树是递归定义的。
注意:树形结构中,子树之间不能有交集,否则就不是树形结构。

树的相关概念

节点的度:一个节点含有的子树的个数称为该节点的度;如上图:A的度为6
叶节点或终端节点:度为0的节点称为叶节点;如上图:B、C、H、I…等节点为叶节点
非终端节点或分支节点:度不为0的节点;如上图:D、E、F、G…等节点为分支节点
双亲节点或父节点:若一个节点含有子节点,则这个节点称为其子节点的父节点;如上图:A是B的父节点
孩子节点或子节点:若一个节点含有父节点,则这个节点称为其父节点的子节点;如上图:B是A的子节点
兄弟节点:具有相同父节点的节点互称为兄弟节点;如上图:B、C是兄弟节点
树的度:一棵树中,最大的节点的度称为树的度;如上图:树的度为6
节点的层次:从根开始定义起,根为第一层,根的子节点为第二层,以此类推
树的高度或深度:书中节点的最大层次;如上图:树的高度为4
堂兄弟节点:双亲在同一层的节点互为堂兄弟;如上图:H、I互为堂兄弟节点
节点的祖先:从根到该节点所经分支上的所有节点;如上图:A上所有节点的祖先
子孙:以某节点为根的子树中任一节点都称为该节点的子孙;如上图:所有节点都是A的子孙
森林:由m(m >0)颗互不相交的树的集合称为森林
树的表示
树结构相对线性表就比较复杂了,要存储表示起来就比较麻烦了,既要保存值域,也要保存节点和节点之间的关系,实际中树有很多种表示方法,如:双亲表示法、孩子表示法、孩子双亲表示法以及孩子兄弟表示法等。这里举例最常用的孩子兄弟表示法。
typedef int DataType; struct Node { struct Node* _firstChild1; // 第一个孩子结点 struct Node* _pNextBrother; // 指向其下一个兄弟结点 DataType _data; // 结点中的数据域 };- 1
- 2
- 3
- 4
- 5
- 6
- 7

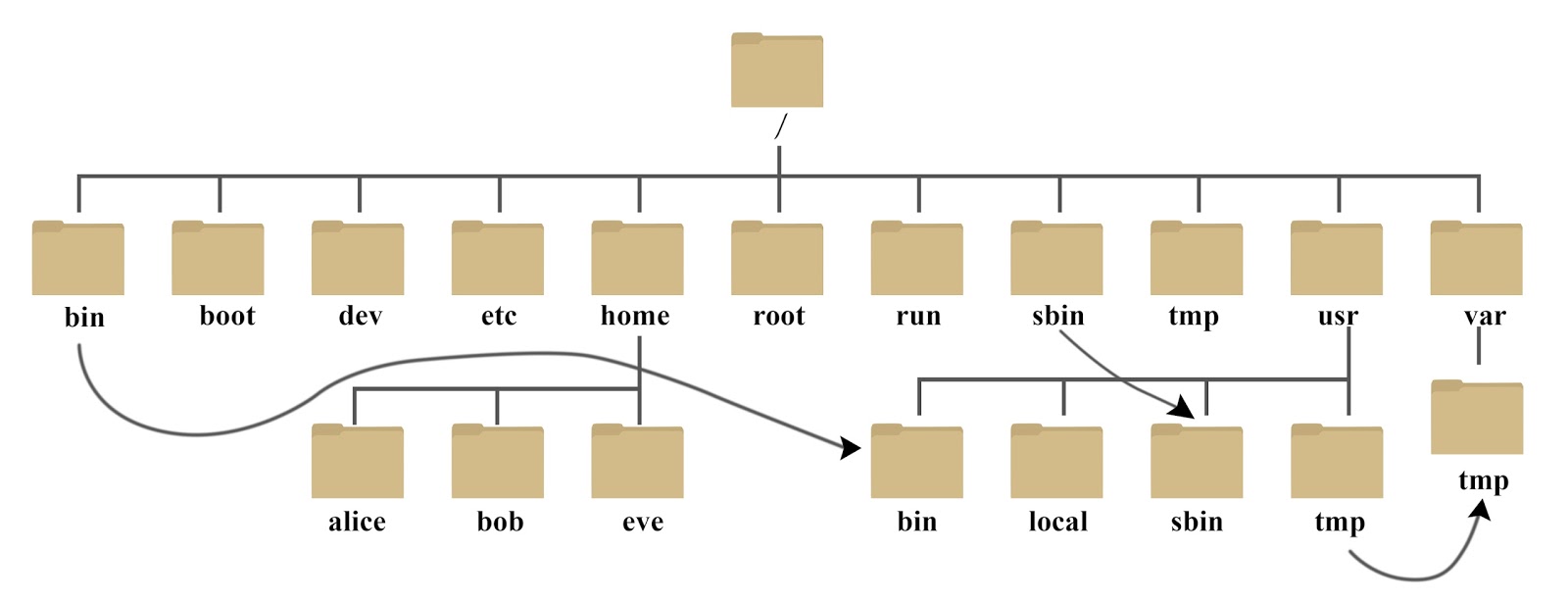
树在实际中的运用
表示文件系统的目录树结构
二叉树的概念及结构
二叉树的概念
一颗二叉树是节点的一个有限集合,该集合:
- 由一个根节点加上两颗称为左子树和右子树的二叉树组成
- 或者为空

从上图可以看出:
- 二叉树不存在度大于2的节点
- 二叉树的子树有左右之分,次序不能颠倒,因此二叉树是有序树
注意:对于任意的二叉树都是由以下几种情况复合而成的:

现实中的二叉树

特殊的二叉树
-
满二叉树:一个二叉树,如果每一层的节点数都达到最大值,则这个二叉树就是满二叉树。也就是说,如果一个二叉树的层数为K,且节点总数是 2 k − 1 2^k - 1 2k−1,则它就是满二叉树。
-
完全二叉树:完全二叉树是效率很高的数据结构,完全二叉树是由满二叉树而引出来的。对于深度为K的,有n个节点的二叉树,当且仅当其每一个节点都与深度为K的满二叉树中编号从1至n的节点一一对应时称之为完全二叉树。要注意的是满二叉树是一种特殊的完全二叉树。

二叉树的性质
- 若规定根节点的层数为1,则一颗非空二叉树的第 i i i层上最多有 2 i − 1 2^{i-1} 2i−1个节点
- 若规定根节点的层数为1,则深度为 h h h的二叉树的最大节点数是 2 k − 1 2^{k}-1 2k−1
- 对任何一颗二叉树,如果度为0,其叶节点个数为 n 0 n_0 n0,度为2的分支节点个数为 n 2 n_2 n2,则有 n 0 = n 2 + 1 n_0 = n_2 + 1 n0=n2+1
- 若规定根节点的层数为1,具有n个节点满二叉树的深度为 h = l o g 2 n + 1 h = log_2^{n+1} h=log2n+1
- 对于具有
n
n
n个节点的完全二叉树,如果按照从上至下从左至右的数组顺序对所有节点从0开始编号,则对于序号为
i
i
i的节点有:
- 若 i > 0 i>0 i>0, i i i位置节点的双亲序号: ( i − 1 ) / 2 (i-1)/2 (i−1)/2;若 i = 0 i=0 i=0, i i i为1根节点编号,无双亲节点
- 若
2
i
+
1
<
n
2i+1
2i+1<n ,左孩子序号: 2 i + 1 2i+1 2i+1;若 2 i + 1 > = n 2i+1>=n 2i+1>=n,则无左孩子 - 若
2
i
+
2
<
n
2i+2
2i+2<n ,右孩子序号: 2 i + 2 2i+2 2i+2;若 2 i + 2 > = n 2i+2>=n 2i+2>=n,则无右孩子
二叉树的存储结构
二叉树一般可以使用两种结构存储,一种顺序结构,一种链式结构。
- 顺序存储
顺序结构存储就是使用数组来存储,一般使用数组只适合表示完全二叉树,因为不是完全二叉树会有空间的浪费。而现实使用中只有堆才会使用数组来存储。二叉树顺序存储在物理上是一个数组,在逻辑上是一颗二叉树。

- 链式存储
二叉树的链式存储结构是指,用链表来表示一颗二叉树,即用链来指示元素的逻辑关系。通常的方法是链表中每个节点由三个域组成,数据域和左右指针域,左右指针分别用来给出该节点左孩子和右孩子所在的链节点的存储地址。链式结构又分为二叉链和三叉链,一些简单的二叉树一般都是二叉链,而在高阶数据结构如红黑树和AVL树会用到三叉链

typedef int BTDataType; // 二叉链 struct BinaryTreeNode { struct BinTreeNode* _pLeft; // 指向当前节点左孩子 struct BinTreeNode* _pRight; // 指向当前节点右孩子 BTDataType _data; // 当前节点值域 }; // 三叉链 struct BinaryTreeNode { struct BinTreeNode* _pParent; // 指向当前节点的双亲 struct BinTreeNode* _pLeft; // 指向当前节点左孩子 struct BinTreeNode* _pRight; // 指向当前节点右孩子 BTDataType _data; // 当前节点值域 };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
二叉树的顺序结构及实现
二叉树的顺序结构
普通的二叉树是不适合用数组来存储的,因为可能会存在大量的空间浪费。而完全二叉树更适合使用顺序结构存储。现实中我们通常把堆(一种二叉树)使用顺序结构的数组来存储,需要注意的是这里的堆和操作系统虚拟进程地址空间中的堆是两回事,一个是数据结构,一个是操作系统中管理内存的一块区域分段。
堆的概念及结构
如果有一个关键码的集合 k = k 0 , k 1 , k 2 , . . . , k n − 1 k={k_0,k_1,k_2,...,k_{n-1}} k=k0,k1,k2,...,kn−1,把它的所有元素按完全二叉树的顺序存储方式存储在一个一维数组中,并满足: K i < = K 2 ∗ i + 1 且 K i < = K 2 ∗ i + 2 ( K i > = K 2 ∗ i + 1 且 K i > = K 2 ∗ i + 2 ) i = 0 , 1 , 2... K_i<=K_{2*i+1}且K_i<=K_{2*i+2}(K_i>=K_{2*i+1}且K_i>=K_{2*i+2})i=0,1,2... Ki<=K2∗i+1且Ki<=K2∗i+2(Ki>=K2∗i+1且Ki>=K2∗i+2)i=0,1,2...,则称为小堆(或大堆)。将根节点最大的堆叫做最大堆或大根堆,根节点最小的堆叫做最小堆或小根堆。
堆的性质:
- 堆中某个节点的值总是不大于或不小于其父节点的值;
- 堆总是一颗完全二叉树。
堆的实现
堆的结构声明
typedef int HeapDateType; typedef struct Heap{ HeapDateType* array; int size; int capacity; }Heap;- 1
- 2
- 3
- 4
- 5
- 6
堆的初始化
void HeapInit(Heap* p){ assert(p); p->array = NULL; p->size = p->capacity = 0; }- 1
- 2
- 3
- 4
- 5
堆的销毁
void HeapDestroy(Heap* p){ assert(p); free(p->array); p->array = NULL; p->size = p->capacity = 0; }- 1
- 2
- 3
- 4
- 5
- 6
堆的向上调整算法

void AdJustUp(HeapDateType* array, int child){ int parent = (child - 1) / 2; while(child > 0){ if(array[child] < array[parent]){ Swap(&array[child], &array[parent]); child = parent; parent = (child - 1) / 2; } else{ break; } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
堆的插入
void HeapPush(Heap* p, HeapDateType data){ assert(p); if(p->size == p->capacity){ int NewCapacity = p->capacity == 0 ? 4 : p->capacity * 2; HeapDateType* NewArray = (HeapDateType*)realloc(p->array, sizeof(HeapDateType) * NewCapacity); if(NewArray == NULL){ perror("realloc fail"); exit(-1); } p->capacity = NewCapacity; p->array = NewArray; } p->array[p->size++] = data; AdJustUp(p->array, p->size - 1); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
堆的向下调整算法

void AdJustDown(HeapDateType* array, int arraySize, int parent){ int child = parent * 2 + 1; while(child < arraySize){ if(child + 1 < arraySize && array[child] > array[child + 1]){ child++; } if(array[child] < array[parent]){ Swap(&array[child], &array[parent]); parent = child; child = parent * 2 + 1; } else{ break; } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
堆的删除

将数组中的第一个和最后一个交换,然后数组尾删,再然后重新进行堆的向下排序算法。
void HeapPop(Heap* p){ assert(p); assert(!HeapEmpty(p)); Swap(&p->array[0], &p->array[--p->size]); AdJustDown(p->array, p->size, 0); }- 1
- 2
- 3
- 4
- 5
- 6
获取堆顶元素
HeapDateType HeapTop(Heap* p){ assert(p); assert(!HeapEmpty(p)); return p->array[0]; }- 1
- 2
- 3
- 4
- 5
判断堆是否为空
int HeapEmpty(Heap* p){ assert(p); return p->size == 0; }- 1
- 2
- 3
- 4
获取堆的元素数量
int HeapSize(Heap* p){ assert(p); return p->size; }- 1
- 2
- 3
- 4
堆的应用
堆排序
堆排序即利用堆的思想来进行排序,总共分为两个步骤:
1. **建堆** * 升序:建大堆 * 降序:建小堆 2. **利用堆删除思想来进行排序**- 1
- 2
- 3
- 4
建堆和堆删除中都用到了向下调整,因此掌握了向下调整,就可以完成堆排序。
排序方法一
用到了数据结构——堆,建好堆并且初始化后,将数组里面的每个元素插入堆里,然后每次取堆顶元素放入数组中,即可完成排序。
建堆时间复杂度: O ( N ∗ l o g N ) O(N*log^{N}) O(N∗logN)、空间复杂度 O ( N ) O(N) O(N)
排序时间复杂度: O ( N ∗ l o g N ) O(N*log^{N}) O(N∗logN)、空间复杂度 O ( 1 ) O(1) O(1)
void HeapSort1(int* arr, int arrSize){ Heap obj; HeapInit(&obj); //建堆 for(int i = 0; i < arrSize; i++){ HeapPush(&obj, arr[i]); } //排序 for(int i = 0; i < arrSize; i++){ arr[i] = HeapTop(&obj); HeapPop(&obj); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
排序方法二
直接对数组进行向上调整建堆,建好之后,依次将堆顶元素与数组尾元素进行交换然后向下调整(调整时不包括交换过的堆顶元素),即可完成排序。
建堆时间复杂度 O ( N ∗ l o g N ) O(N*log^{N}) O(N∗logN)、空间复杂度 O ( 1 ) O(1) O(1)
排序时间复杂度: O ( N ∗ l o g N ) O(N*log^{N}) O(N∗logN)、空间复杂度 O ( 1 ) O(1) O(1)
void HeapSort2(int* arr, int arrSize){ for(int i = 0; i < arrSize; i++){ AdJustUp(arr, i); } for(int i = arrSize - 1; i > 0; i--){ Swap(&arr[0], &arr[i]); AdJustDown(arr, i, 0); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
排序方法三
对数组进行向下调整建堆,其余操作与方法二相同
建堆时间复杂度 O ( N ) O(N) O(N)、空间复杂度 O ( 1 ) O(1) O(1)
排序时间复杂度: O ( N ∗ l o g N ) O(N*log^{N}) O(N∗logN)、空间复杂度 O ( 1 ) O(1) O(1)
void HeapSort3(int* arr, int arrSize){ for(int i = (arrSize - 1 - 1) / 2; i > 0; i--){ AdJustDown(arr, arrSize, i); } for(int i = arrSize - 1; i > 0; i--){ Swap(&arr[0], &arr[i]); AdJustDown(arr, i, 0); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
TOP-K问题
TOP-K问题:即求数据集合中前K个最大的元素或者最小的元素(不要求排序),一般情况下数据量都比较大。
比如:专业前10名、世界500强、富豪榜、游戏中前100的活跃玩家等。
对于TOP-K问题,能想到的最直接简单的方法就是排序,但是:如果数据量非常大,排序就不太可取(可能数据都不能一下子全部加载到内存中)。最佳的方式就是用堆来解决,基本思路如下:
- 用数据集合中前K个元素来建堆
- 前K个最小的元素,建大堆
- 前K个最大的元素,建小堆
- (前K个最大的元素举例)用剩余的N-K个元素依次与堆顶元素来比较,若小于则替换堆顶元素(进堆),然后向下调整
将剩余N-K个元素依次与堆顶元素比完之后,堆中剩余的K个元素就是所求的前K个最小或最大元素(该K个元素是未排序的)。
int* GetMaxTopK(int* arr, int arrSize, int k){ int* heap = (int*)malloc(sizeof(int) * k); for(int i = 0; i < k; i++){ heap[i] = arr[i]; } for(int i = (k - 1 - 1) / 2; i > 0; i--){ AdJustDown(heap, k, i); } for(int i = k; i < arrSize; i++){ if(arr[i] > heap[0]){ heap[0] = arr[i]; AdJustDown(heap, k, 0); } } return heap; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
二叉树的链式结构及实现
二叉树是:
- 空树
- 非空树:根节点、根节点的左子树、根节点的右子树组成的

从概念中可以看出,二叉树定义是递归的,因此后序内容中的操作基本都是按照该概念实现的。
二叉树的链式结构
链式二叉树的实现
树的结构声明
typedef char BinaryTreeDateType; typedef struct BinaryTreeNode{ struct BinaryTreeNode* left; struct BinaryTreeNode* right; BinaryTreeDateType data; }BinaryTreeNode;- 1
- 2
- 3
- 4
- 5
- 6
树的创建
由于二叉树不能进行增加和删除操作,所以一般都是给定一个字符串,该字符串中含有需要我们构建的二叉树的所有节点,我们通过读取字符串中的内容来构建二叉树。
//通过前序遍历的数组"ABD##E#H##CF##G##"构建二叉树(#表示空树) BinaryTreeNode* BinaryTreeCreate(BinaryTreeDateType* array, int* pi){ if(array[*pi] == '#'){ (*pi)++; return NULL; } BinaryTreeNode* root = (BinaryTreeNode*)malloc(sizeof(BinaryTreeNode)); if(root == NULL){ perror("malloc fail"); exit(-1); } root->data = array[(*pi)++]; root->left = BinaryTreeCreate(array, pi); root->right = BinaryTreeCreate(array, pi); return root; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
树的销毁
void BinaryTreeDestroy(BinaryTreeNode* root){ if(root == NULL){ return; } BinaryTreeDestroy(root->left); BinaryTreeDestroy(root->right); free(root); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
树的节点个数
int BinaryTreeSize(BinaryTreeNode* root){ if(root == NULL){ return 0; } return BinaryTreeSize(root->left) + BinaryTreeSize(root->right) + 1; }- 1
- 2
- 3
- 4
- 5
- 6
树的叶子节点个数
int BinaryTreeLeafSize(BinaryTreeNode* root){ if(root == NULL){ return 0; } if(root->left == NULL && root->right == NULL){ return 1; } return BinaryTreeLeafSize(root->left) + BinaryTreeLeafSize(root->right); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
树的第K层的节点个数
int BinaryTreeLevelKSize(BinaryTreeNode* root, int k){ if(root == NULL){ return 0; } if(k == 1){ return 1; } return BinaryTreeLevelKSize(root->left, k - 1) + BinaryTreeLevelKSize(root->right, k - 1); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
树的高度
int BinaryTreeHeight(BinaryTreeNode* root){ if(root == NULL){ return 0; } int HeightLeft = BinaryTreeHeight(root->left); int HeightRight = BinaryTreeHeight(root->right); return (HeightLeft > HeightRight ? HeightLeft : HeightRight) + 1; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
寻找树的节点
BinaryTreeNode* BinaryTreeFind(BinaryTreeNode* root, BinaryTreeDateType x){ if(root == NULL){ return NULL; } if(root->data == x){ return root; } BinaryTreeNode* RetLeft = BinaryTreeFind(root->left, x); if(RetLeft){ return RetLeft; } BinaryTreeNode* RetRight = BinaryTreeFind(root->right, x); if(RetRight){ return RetRight; } return NULL; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
树的遍历
二叉树有四种遍历方式:前序遍历、中序遍历、后序遍历、层序遍历。
前序遍历:先访问根节点,再访问左子树,再访问右子树。
中序遍历:先访问左子树,再访问根节点,再访问右子树。
后序遍历:先访问左子树,再访问右子树,再访问根节点,
层序遍历:按照二叉树的逻辑结构,每一层每一层的访问,而每一层遵循从左到右的方向访问。
树的前序遍历
void BinaryTreePrevOrder(BinaryTreeNode* root){ if(root == NULL){ return; } printf("%d ", root->data); BinaryTreePrevOrder(root->left); BinaryTreePrevOrder(root->right); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
树的中序遍历
void BinaryTreeInOrder(BinaryTreeNode* root){ if(root == NULL){ return; } BinaryTreeInOrder(root->left); printf("%d ", root->data); BinaryTreeInOrder(root->right); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
树的后序遍历
void BinaryTreePostOrder(BinaryTreeNode* root){ if(root == NULL){ return; } BinaryTreePostOrder(root->left); BinaryTreePostOrder(root->right); printf("%d ", root->data); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
树的层序遍历
区别于上面三种遍历(递归),层序遍历采用的是非递归(用到了队列),基本思路如下:
先将二叉树的根节点入队列,当根节点出队列时,将该根节点的左右节点入队列。
就会导致一个效果:每当该层的节点全部出队列时(访问完毕),该层的下一层的节点已经全部入了队列。
void BinaryTreeLevelOrder(BinaryTreeNode* root){ Queue con; QueueInit(&con); if(root){ QueuePush(&con, root); } while(!QueueEmpty(&con)){ BinaryTreeNode* front = QueueFront(&con); QueuePop(&con); printf("%c ", front->data); if(front->left){ QueuePush(&con, front->left); } if(front->right){ QueuePush(&con, front->right); } } printf("\n"); QueueDestroy(&con); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
判断树是否是完全二叉树
对于深度为K的,有n个节点的二叉树,当且仅当其每一个节点都与深度为K的满二叉树中编号从1至n的节点一一对应时称之为完全二叉树。
完全二叉树严格遵守以上定义。
所以当遍历完全二叉树出现第一次空树时,后面的遍历中绝不可能再出现非空树,如果出现非空树,则该树不是完全二叉树。
bool BinaryTreeComplete(BinaryTreeNode* root){ Queue con; QueueInit(&con); if(root){ QueuePush(&con, root); } while(!QueueEmpty(&con)){ BinaryTreeNode* front = QueueFront(&con); QueuePop(&con); if(front == NULL){ break; } QueuePush(&con, front->left); QueuePush(&con, front->right); } while(!QueueEmpty(&con)){ BinaryTreeNode* front = QueueFront(&con); QueuePop(&con); if(front != NULL){ QueueDestroy(&con); return false; } } QueueDestroy(&con); return true; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
完整代码
由于代码完全由C实现,并且有些接口需要用到队列,所以工程中将引入由C实现的队列。
-
相关阅读:
esxi网卡直通后虚拟机无网
非对称密码体制、单钥密码体制、私钥密码体制是一个概念对吗?
S7协议规范常量
### Cause: java.sql.SQLRecoverableException: 无法从套接字读取更多的数据
双位置继电器JDP-1440/DC110V
Adams 插件Plugin二次开发教程
个人秋招记录——欢迎交流
算法篇------动态规划1
【图像处理 】001 Android 中 Bitmap 压缩的几种方法浅析
卷积神经网络<二>keras实现多分支输入VGG
- 原文地址:https://blog.csdn.net/qq_67569905/article/details/126558670
