-
Linux学习之进程通讯(IPC)—进程之间的通信
Linux学习之进程通讯(IPC)—进程之间的通信
前言
本文记录进程之间不同通讯方式的学习过程以及程序案例,学习过程中得益于以下两篇优秀博文:
凉了!张三同学没答好「进程间通信」,被面试官挂了…(图文并茂,言简意骇,有助于概念理解)
进程间通信的六种常见方式(逻辑清晰,干净整洁,有程序源码)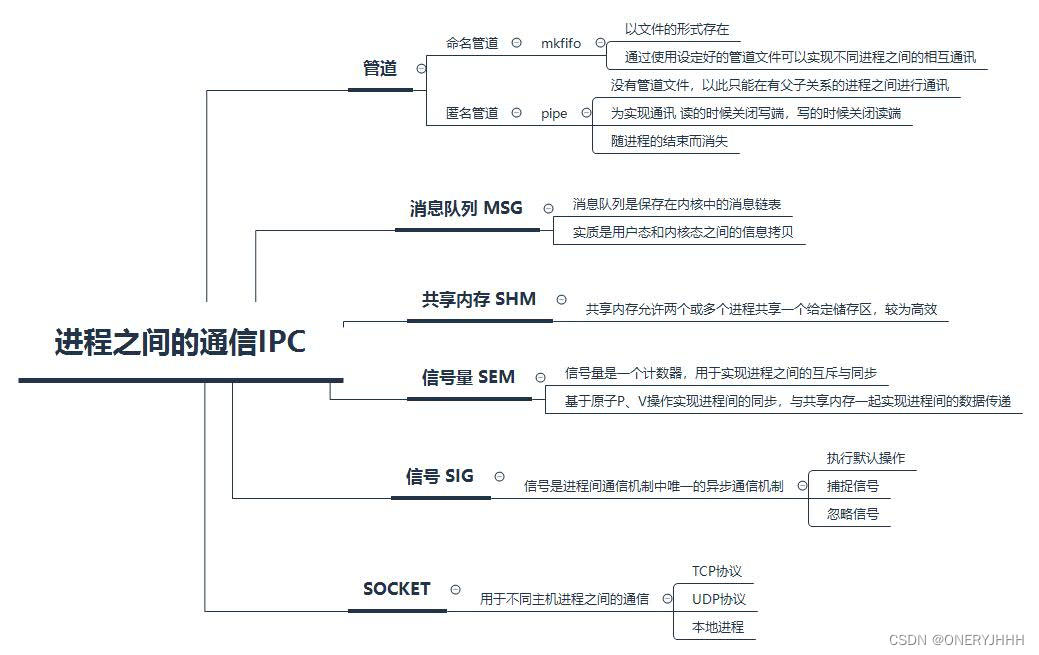
一、管道
管道使用简单,但效率较低,不适用于进程之间的频繁信息交流。
1.1匿名管道
匿名管道pipe 是一种半双工的通信方式,只能在具有亲缘关系的进程间使用.进程的亲缘关系一般指的是父子关系。使用写入端口时关闭读取端口,使用读取端口时关闭写入端口,可以使用普通的read、write等函数进行读写操作,操作时遵循先进先出原则。
1.1.1 pipe 原型
#includeint pipe(int pipefd[2]); - 1
- 2
- 3
1.1.2 pipe 实例
#include#include #include #include #include #include //匿名管道的创建与使用 int main() { int fd[2]; char buf[1024]={""}; int pid; int states; if(pipe(fd)==-1) { printf("fail!\n"); } pid=fork(); if(pid<0) { printf("creat child fail!\n"); } else if(pid>0)//父进程 { printf("This is Father\n"); sleep(3); close(fd[0]);//管道0负责读 1负责写 write(fd[1],"Hello from father",strlen("Hello from father")); wait(&states); } else//子进程 { printf("This is child\n"); close(fd[1]); read(fd[0],buf,1000); printf("read from father:%s\n",buf); exit(0); } return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
1.2 命名管道
命名管道FIFO,以一种特殊设备文件形式存在于文件系统中,有路径名与之相关联。因此,可以在无关的进程之间交换数据。
1.2.1 fifo 原型
#include#include int mkfifo(const char *pathname, mode_t mode); - 1
- 2
- 3
- 4
- 5
1.2.2 fifo 实例
进程向管道写入
#include#include #include #include #include #include #include #include //有名管道的写入 int main() { char *str="message from fife"; int cnt=0; int fd=open("flie",O_WRONLY); printf("write open success\n"); while(1) { sleep(1); write(fd,str,strlen(str)); if(cnt>5) { break; } cnt++; } close(fd); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
进程从管道读取
#include#include #include #include #include #include #include #include //有名管道的读取fifo int main() { char buf[30]={0}; int nread=0; if(mkfifo("flie",0600==-1) && errno!=EEXIST) { printf("mkfifo failed\n"); perror("why"); } int fd=open("flie",O_RDONLY); printf("open success\n"); while(1) { nread=read(fd,buf,30); printf("read %d byte from fifo,context:%s\n",nread,buf); } close(fd); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
二、消息队列
消息队列是保存在内核中的消息链表,在发送数据时,会分成一个一个独立的数据单元,也就是消息体(数据块),消息体是用户自定义的数据类型,消息的发送方和接收方要约定好消息体的数据类型,所以每个消息体都是固定大小的存储块,不像管道是无格式的字节流数据。如果进程从消息队列中读取了消息体,内核就会把这个消息体删除,不必遵循先进先出原则,可以跟据数据类型进行读取。
消息队列生命周期随内核,如果没有释放消息队列或者没有关闭操作系统,消息队列会一直存在,而前面提到的匿名管道的生命周期,是随进程的创建而建立,随进程的结束而销毁。
但是,鉴于传输上限的限制消息队列不适合应用于大型数据的传输。同时,本质是用户态与内核态之间的信息拷贝,增大了工作量。2.1 msg 原型
// 创建或打开消息队列:成功返回队列ID,失败返回-1 int msgget(key_t key, int flag); // 添加消息:成功返回0,失败返回-1 int msgsnd(int msqid, const void *ptr, size_t size, int flag); // 读取消息:成功返回消息数据的长度,失败返回-1 int msgrcv(int msqid, void *ptr, size_t size, long type,int flag); // 控制消息队列:成功返回0,失败返回-1 int msgctl(int msqid, int cmd, struct msqid_ds *buf);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
2.2 msg 实例
2.2.1 单向通信实例
发送端
#include#include #include #include #include struct msgbuf { long mtype; char mtext[128]; }; int main() { struct msgbuf sendbuf={888,"This is message from quen"}; //1. int msgget(key_t key, int msgflg); int msgid=msgget(0x1234,IPC_CREAT|0777); if(msgid==-1) { printf("creat que failed!\n"); } //2. int msgsnd(int msqid, const void *msgp, size_t msgsz, int msgflg); //3. ssize_t msgrcv(int msqid, void *msgp, size_t msgsz, long msgtyp, int msgflg) msgsnd(msgid,&sendbuf,strlen(sendbuf.mtext),0); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
接收端
#include#include #include #include #include #include #include struct msgbuf { long mtype; char mtext[128]; }; int main() { struct msgbuf readbuf; //1. int msgget(key_t key, int msgflg); int msgid=msgget(0x1234,IPC_CREAT|0777); if(msgid==-1) { printf("creat que failed!\n"); } // int msgsnd(int msqid, const void *msgp, size_t msgsz, int msgflg); // ssize_t msgrcv(int msqid, void *msgp, size_t msgsz, long msgtyp, int msgflg) msgrcv(msgid,&readbuf,sizeof(readbuf.mtext),888,0); printf("read from que:%s\n",readbuf.mtext); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
2.2.2 双向通信实例
先发再读
#include#include #include #include #include // int msgget(key_t key, int msgflg); // int msgsnd(int msqid, const void *msgp, size_t msgsz, int msgflg); // ssize_t msgrcv(int msqid, void *msgp, size_t msgsz, long msgtyp,int msgflg); struct msgbuf{ long mtype; /* message type, must be > 0 */ char mtext[128]; /* message data */ }; int main() { struct msgbuf sendbuf={888,"message from send"}; struct msgbuf readbuf; key_t key; if((key = ftok(".",'z')) < 0){ printf("ftok error\n"); } int msgId = msgget(key,IPC_CREAT|0777); if(msgId == -1){ printf("get quen failed\n"); } msgsnd(msgId,&sendbuf,strlen(sendbuf.mtext),0); printf("send over\n"); msgrcv(msgId,&readbuf,sizeof(readbuf.mtext),999,0); printf("read from get is:%s\n",readbuf.mtext); msgctl(msgId,IPC_RMID,NULL); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
先读再发
#include#include #include #include #include // int msgget(key_t key, int msgflg); // int msgsnd(int msqid, const void *msgp, size_t msgsz, int msgflg); // ssize_t msgrcv(int msqid, void *msgp, size_t msgsz, long msgtyp,int msgflg); struct msgbuf{ long mtype; /* message type, must be > 0 */ char mtext[128]; /* message data */ }; int main() { struct msgbuf readbuf; memset(readbuf.mtext, '\0', sizeof(readbuf.mtext)); struct msgbuf sendbuf={999,"thank for your reach"}; key_t key; //获取key值 if((key = ftok(".",'z')) < 0){ printf("ftok error\n"); } int msgId = msgget(key,IPC_CREAT|0777); if(msgId == -1){ printf("get quen failed\n"); perror("why"); } msgrcv(msgId,&readbuf,sizeof(readbuf.mtext),888,0); printf("read from send is:%s\n",readbuf.mtext); msgsnd(msgId,&sendbuf,strlen(sendbuf.mtext),0); msgctl(msgId,IPC_RMID,NULL); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
三、共享内存
消息队列的读取和写入的过程,都会有发生用户态与内核态之间的消息拷贝过程。那共享内存的方式,就很好的解决了这一问题。共享内存的机制,就是拿出一块虚拟地址空间来,映射到相同的物理内存中。这样这个进程写入的东西,另外一个进程马上就能看到了,不需要拷贝来拷贝去,传来传去,大大提高了进程间通信的速度。
3.1 共享内存的原型
// 创建或获取一个共享内存:成功返回共享内存ID,失败返回-1 int shmget(key_t key, size_t size, int flag); // 连接共享内存到当前进程的地址空间:成功返回指向共享内存的指针,失败返回-1 void *shmat(int shm_id, const void *addr, int flag); // 断开与共享内存的连接:成功返回0,失败返回-1 int shmdt(void *addr); // 控制共享内存的相关信息:成功返回0,失败返回-1 int shmctl(int shm_id, int cmd, struct shmid_ds *buf);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
3.2 shm 实例
发送数据
#include#include #include //共享内存的创建 //int shmget(key_t key, size_t size, int shmflg); //void *shmat(int shmid, const void *shmaddr, int shmflg); //int shmdt(const void *shmaddr); //void *shmat(int shmid, const void *shmaddr, int shmflg); //int shmdt(const void *shmaddr); int main() { key_t key; key=ftok(".",1); int shmid=shmget(key,1024*4,IPC_CREAT|0777);//创建,内存大小必须得是MB的整数倍 if(shmid==-1) { printf("failed!\n"); exit(-1); } char *shmadder=shmat(shmid,0,0);//映射挂载 printf("shmat ok\n"); strcpy(shmadder,"message frome send"); sleep(5);//等待五秒 shmdt(shmadder);//卸载 shmctl(shmid,IPC_RMID,0);//删除空间 printf("quit!!!\n"); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
读取数据
#include#include #include #include //共享内存的创建 //int shmget(key_t key, size_t size, int shmflg); //void *shmat(int shmid, const void *shmaddr, int shmflg); //int shmdt(const void *shmaddr); //void *shmat(int shmid, const void *shmaddr, int shmflg); //int shmdt(const void *shmaddr); int main() { key_t key; key=ftok(".",1); int shmid=shmget(key,1024*4,0);//获取 if(shmid==-1) { printf("failed!\n"); exit(-1); } char *shmadder=shmat(shmid,0,0);//映射挂载 printf("shmat ok\n"); printf("data:%s\n",shmadder); shmdt(shmadder);//卸载 shmctl(shmid,IPC_RMID,0);//删除空间 printf("quit!!!\n"); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
四、信号量
信号量与已经介绍过的 IPC 结构不同,它是一个计数器。信号量用于实现进程间的互斥与同步,而不是用于存储进程间通信数据。信号量基于操作系统的 P、V原子操作,用于进程间同步,若要在进程间传递数据需要结合共享内存。每次对信号量的 PV 操作不仅限于对信号量值加 1 或减 1,而且可以加减任意正整数。
4.1 信号量原型
// 创建或获取一个信号量组:若成功返回信号量集ID,失败返回-1 int semget(key_t key, int num_sems, int sem_flags); // 对信号量组进行操作,改变信号量的值:成功返回0,失败返回-1 int semop(int semid, struct sembuf semoparray[], size_t numops); // 控制信号量的相关信息 int semctl(int semid, int sem_num, int cmd, ...);- 1
- 2
- 3
- 4
- 5
- 6
4.2 信号量实例
#include#include #include #include #include // int semget(key_t key, int nsems, int semflg); // int semctl(int semid, int semnum, int cmd, ...); // int semop(int semid, struct sembuf *sops, size_t nsops); union semun{ int val; /* Value for SETVAL */ struct semid_ds *buf; /* Buffer for IPC_STAT, IPC_SET */ unsigned short *array; /* Array for GETALL, SETALL */ struct seminfo *__buf; /* Buffer for IPC_INFO (Linux-specific) */ }; //P操作,拿钥匙 void PGetKey(int semid) { struct sembuf sops; sops.sem_num = 0;// 信号量组中对应的序号,0~sem_nums-1 sops.sem_op = -1;// 信号量值在一次操作中的改变量 sops.sem_flg = SEM_UNDO;// IPC_NOWAIT, SEM_UNDO semop(semid, &sops, 1); } //V操作,放回钥匙 void VPutBackKey(int semid) { struct sembuf sops; sops.sem_num = 0; sops.sem_op = 1; sops.sem_flg = SEM_UNDO; semop(semid, &sops, 1); } int main() { key_t key; int semid; if((key == ftok(".",6)) < 0) { printf("ftok error\n"); } semid = semget(key , 1, IPC_CREAT|0666);//创造信号量集合 钥匙,数量为1 union semun sem; sem.val = 0;//初始状态为没有钥匙 semctl(semid, 0, SETVAL, sem);//SETVAL初始化信号量为一个已知的值,这时就需要第四个参数 //0表示操作第一把钥匙 int pid = fork(); if(pid < 0) { printf("fork failed\n"); }else if(pid == 0)//子进程 { printf("this is child\n"); VPutBackKey(semid);//子进程运行结束后把钥匙放回 }else//父进程 { PGetKey(semid);//等子进程将钥匙放回后才会进行操作,保证子进程先执行(最开始无锁状态,父进程拿不到锁,进程堵塞) printf("this is father\n"); VPutBackKey(semid); semctl(semid, 0, IPC_RMID);//销毁钥匙 } return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
五、信号
信号signal属于软中断,属于异步通讯。终端用户输入了 ctrl+c 来中断程序,会通过信号机制(SIGINT)停止一个程序。
信号处理的三种方法分别是:忽略、捕捉和默认动作。5.1 signal
5.1.1信号signal原型
//接收函数,第二个参数指向信号处理函数 sighandler_t signal(int signum, sighandler_t handler); //发送函数 int kill(pid_t pid, int sig);- 1
- 2
- 3
- 4
- 5
5.1.2信号sig实例
接收
#include#include // typedef void (*sighandler_t)(int); // sighandler_t signal(int signum, sighandler_t handler); /*接受到信号后,让信号处理该函数*/ void handler(int signum) { printf("signum = %d\n",signum); switch(signum){ case 2: printf("SIGINT\n"); break; case 9: printf("SIGKILL\n"); break; case 10: printf("SIGUSR1\n"); break; } } int main() { signal(SIGINT,handler); signal(SIGKILL,handler); signal(SIGUSR1,handler); while(1); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
发送
#include#include #include #include // int kill(pid_t pid, int sig); int main(int argc,char **argv) { int signum; int pid; char cmd[128]={0}; signum = atoi(argv[1]);//将字符型转为整型 //消息号 pid = atoi(argv[2]);//进程号 kill(pid,signum);//进程号,信号编号 // sprintf(cmd,"kill -%d%d",signum,pid); // system(cmd); printf("signum = %d,pid = %d\n",signum,pid); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
5.2 sigaction
5.2.1 sigaction 原型
#includeint sigaction(int signum, const struct sigaction *act, struct sigaction *oldact); struct sigaction { void (*sa_handler)(int); //信号处理程序,不接受额外数据,SIG_IGN 为忽略,SIG_DFL 为默认动作 void (*sa_sigaction)(int, siginfo_t *, void *); //信号处理程序,能够接受额外数据和sigqueue配合使用 sigset_t sa_mask;//阻塞关键字的信号集,可以再调用捕捉函数之前,把信号添加到信号阻塞字,信号捕捉函数返回之前恢复为原先的值。 int sa_flags;//影响信号的行为SA_SIGINFO表示能够接受数据 }; //回调函数句柄sa_handler、sa_sigaction只能任选其一 - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
5.2.2 sigaction 实例
接收端
#include#include #include #include #include // int sigaction(int signum, const struct sigaction *act, // struct sigaction *oldact); void handler(int signum ,siginfo_t *info,void *context) { printf("get signum%d\n",signum); if(context!=NULL) { printf("get data=%d\n",info->si_int); printf("from:%d\n",info->si_pid); } } int main() { struct sigaction act; printf("pid:%d\n",getpid()); act.sa_sigaction = handler; act.sa_flags = SA_SIGINFO;//be able to get message sigaction(SIGUSR1,&act,NULL);//注册信号 while(1); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
发送端
#include#include #include #include #include #include // int sigqueue(pid_t pid, int sig, const union sigval value); int main(int argc,char **argv) { int signum; int pid; union sigval value; value.sival_int=100; signum = atoi(argv[1]); pid = atoi(argv[2]); sigqueue(pid,signum,value); printf("send successful\n"); printf("pid=%d,done\n",getpid()); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
六、Socket
-
相关阅读:
【微客云】提供话费快充 慢充,话费批量充值提供api对接
封装了一个简单的C++ HDF5工具库,实现常用数据类型的读写
[go学习笔记.第九章.map] 1.map的介绍,声明,使用方式,crud操作以及遍历
利用AlarmManager完成精准的轮询
什么是Jmeter ?Jmeter使用的原理步骤是什么?
vue3 父组件与子组件v-model双向绑定
面试再也不怕问ThreadLocal了
使用acme.sh配置https证书
[5]http1、2、3的区别
gRPC之.Net6中的初步使用介绍
- 原文地址:https://blog.csdn.net/ONERYJHHH/article/details/126534712
