-
【开源教程17】疯壳·开源编队无人机-PID 基础原理
COCOFLY教程
——疯壳·无人机·系列
PID 基础原理

图1
一、PID 简介
PID 控制是自动控制系统中最常用的一种控制手段,它的诞生主要是为了解决自动控制系统的快、稳、准的问题。
PID 控制中的 P 指的是 Proportion(比例),即对输入的偏差乘以一个系数; I 指的是 Integral(积分),即对输入偏差进行积分运算;而 D 指的是 Derivative(微分),即对输入偏差进行微分运算。通过比例、积分、微分结合适当的反馈就可以形成一套稳定的闭环调节系统。如下图所示为 COCOFLY 的 PID 控制器的结构图。
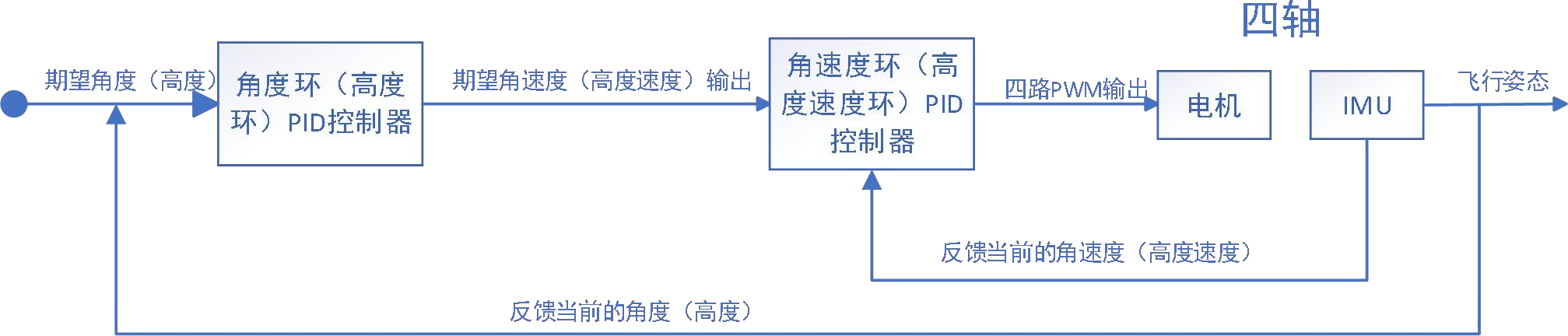
图2
其中期望角度(高度)由遥控器提供,角度环(高度环)以及角速度环(高速度环)由 PID 代码处理,STM32 输出四路 PWM 到无人机的电机控制端口, IMU(惯性测量单元)以及飞行姿态提供反馈值。
二、PID 控制原理
PID 控制的过程,其实是不断纠正偏差的过程,其中的偏差=当前被控对象的反馈值-设定的期望值。 -
相关阅读:
vuInhub靶场实战系列--Kioptrix Level #4
如何提升固态硬盘SSD的寿命?
Visual Studio配置Qt并通过NSIS实现项目打包
11月3日 OpenCV 实战基础学习笔记——图像基本处理
信钰证券:华为汽车概念股持续活跃 圣龙股份斩获12连板
机器学习案例(七):产品需求预测
Linux常用命令 - 简单命令
如何用Stable Diffusion模型生成个人专属创意名片?
xCode14.3.1运行MonkeyDev出现“Executable Not Found“的解决办法
用DIV+CSS技术设计的水果介绍网站(web前端网页制作课作业)
- 原文地址:https://blog.csdn.net/efans_Mike/article/details/126528190