-
ch4-1时域到频域(短时分析)
1. 良好的特征
一个良好的特征,针对不同的问题需要有以下属性:
- 具有信息量的;
- 具有区分度的;
- 独立的;
当前的使用方法:
数据 --> 特征提取 --> 特征 --> 机器学习 --> 预测 --> 预测结果
1.1 全局声学特征
全局特征的局限性在于,当信号是平稳信号才具有意义;
全局特征比如: 基频, 共振峰, 声强;并且全局特征对噪声的鲁棒性较差,
由于实践过程中,经常处理非平稳信号, 所以对信号进行分帧,将一小段信号,分成多个帧, 从而在每一帧当中,可以看做是平稳信号;
2. 分帧
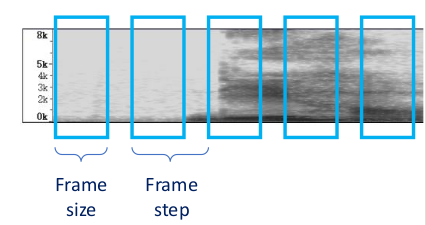
帧的大小: 决定了每一帧的持续时间;帧移: 两个相邻帧,两帧的起始点之间间隔;
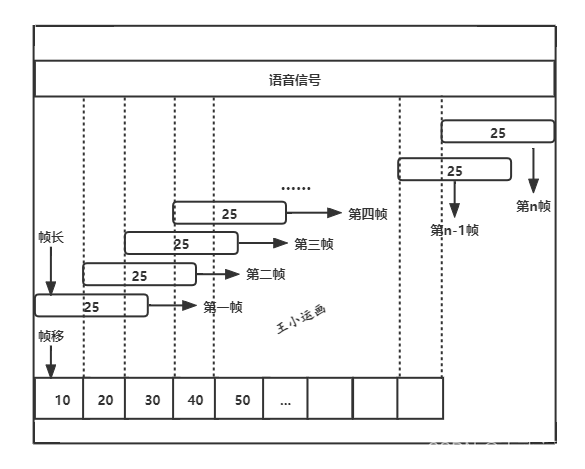
- 当帧长大于帧移时: 帧之间有重叠的采样点, 属于绝大数情况;
- 帧长 = 帧移: 各帧之间相互独立;
- 帧长 小于帧移: 各帧之间,存在采样点的丢失;
2.1 以时间为单位进行分帧
当使用时间为单位,来对帧进行划分时:
一帧信号通常取在15ms-30ms之间,经验值为25ms(业界常用)。
帧长为25ms的一帧信号指的是时长有25毫秒的语音信号。
2.2 以采样点数为单位进行分帧
用时间表示,常设为10ms;
用采样点表示,16kHz采样率的信号帧移一般为160个采样点。
3. 分帧带来的影响
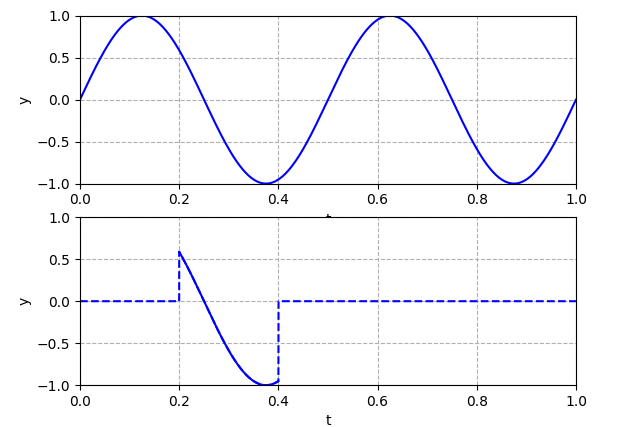
由于分帧之后的信号,
在每一帧的起始点和终点的位置,有着高度的不连续性, 而原始的信号中则不存在这样的情况。3.1 吉布斯现象
如果对分帧之后的信号,直接进行傅里叶变换, 则会产生吉布斯现象,在不连续点产生高频分量,导致傅里叶变换后的频谱出现局部峰值。
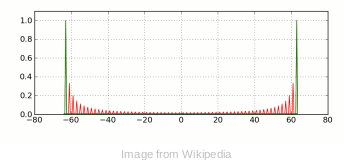
3.2 频谱泄露
周期信号在分帧中被截断,导致频谱在整个频带内发生拖尾现象,这个现象称为频谱泄露, spectral leakage;
为了去除哪些本不应该存在的高频分量, 以及频谱的拖尾现象,
产生了窗函数的方式;
4. 窗函数
窗函数的设计思想:
对帧内的每一个采样点,乘上不同的权重,
具体是, 使用较大的权重 乘以靠近窗中心的信号,
接近0的权重乘以 窗边缘的信号,从而使得靠近帧中心的信号趋于原始数值, 分帧边界的信号趋于0;
4.1 两种窗函数
一帧内的采样点信号, 使用:
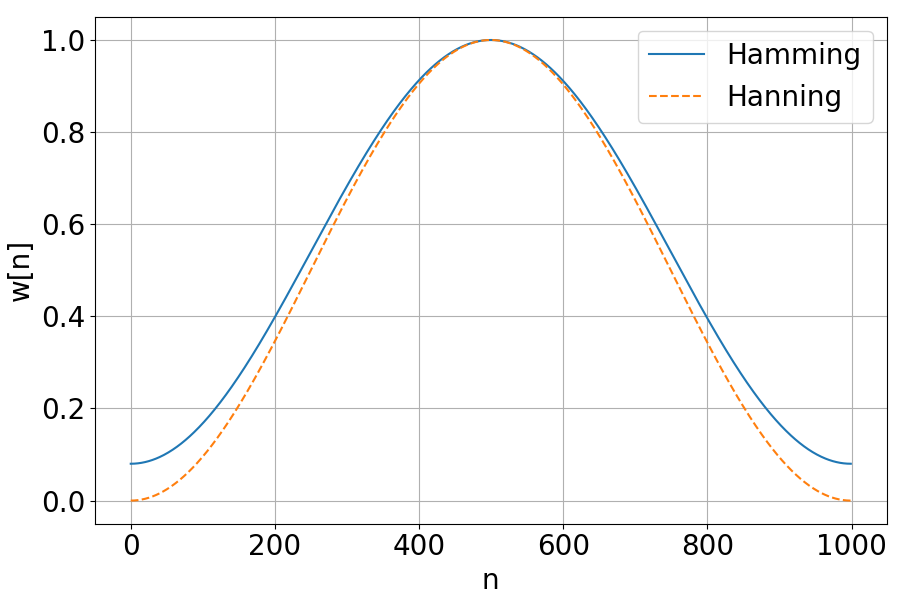
x [ n ] x[n] x[n] , 0 ≤ n ≤ N − 1 表示;窗函数的权重分布:
w [ n ] = ( 1 − α ) − α c o s 2 π n N − 1 w[n] = (1 − α ) − α cos \frac{2πn}{N−1} w[n]=(1−α)−αcosN−12πnhanning 与 hamming,两种窗函数之间的区别就是, α \alpha α 的取值系数不同;
• Hanning: α = 0.5
• Hamming: α = 0.465. 分帧特征的后处理
5.1 帧叠加
相邻两帧进行叠加,用于捕获更多的上下文信息;
5.2 帧的下采样
对相邻的两个叠加帧, 进行间隔采样; 从而减少计算量;
5.3 帧的归一化
对一帧内的数据进行归一化,
从而有利于模型进行收敛;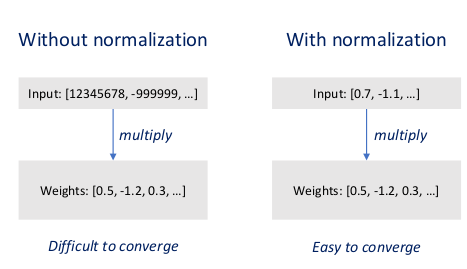
-
相关阅读:
云洲智能IPO被终止:年营收2.5亿亏1.3亿 曾拟募资15.5亿
【0115】libpq连接PostgreSQL数据库
Python_01_如何在CentOS7上安装Python3
Docker 笔记(一)--安装
数据库-第四/五章 数据库安全性和完整性【期末复习|考研复习】
Mysql 事务和存储引擎的概念
计算机视觉中的可解释性分析
什么是数据管理,数据治理,数据中心,数据中台,数据湖?
Linux 网络操作命令Telnet
widows2019服务器重新安装故障转移集群功能后无法重新穿件集群 ,Cluster Service 无法启动也不能使用Cluster命令 怎么清除之前的所有数据
- 原文地址:https://blog.csdn.net/chumingqian/article/details/126476932