-
PMSM中常用的两种坐标变换——两种参数的由来
Xiaoxiaodawei
摘要:
前两期介绍了Clarke的Park变化的基本原理,但是经过这两种变换后会存在两种系数,相信大家都很迷惑,这是什么原因?主要原因是存在两种遵循的方式:1、变换前后电流所产生的旋转磁场等效且电机输出功率不变;2、变换前后电流所合成的空间矢量等效且电机输出功率不变。这两种最后方式是造成系数不同的根本原因,实际应用中可以根据需要选择相应的变换等效原则。
关键词:旋转磁场等效;空间矢量等效;
这一期设计的理论计算能力比较强,强烈建议观看的小伙伴找个安静的角落,哪张纸和笔进行计算!
一、依据旋转磁场等效变换
遵循的两个原则:
- 变换前后电流所产生的旋转磁场等效;
- 变换前后两系统的电机输出功率不变;
1.1、Clarke变换
图1-1是ABC和αβ两个坐标系,取α轴与A轴重合,并假定三相绕组每相有效线圈匝数为N3,两相绕组每相有效线圈匝数为N2,两种坐标系中每相的磁动势均为有效线圈匝数与该相电流的乘积。
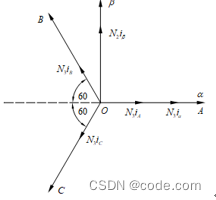
图1-1 Clarke坐标变换矢量示意图1
由图1-1得出磁势守恒式子为:

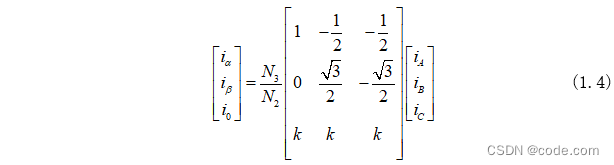
由式(1.1)变形化为矩阵形式为:

为了方便分析,引入零轴变量为:

将式(1.3)合并到式(1.2)可以得到αβ0轴坐标系方程为:
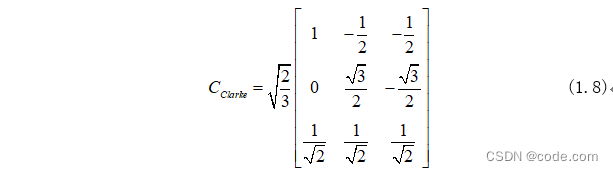
这里定义Clarke矩阵为:

坐标变换中需要确保电机输出功率不能发生变化,故功率计算表达式为:

为了确保变换前后输出功率不变化,可以其中参数求得:

因此Clarke变换式为:
1.2、Park变换
图1-2是两相旋转坐标系转速w随着电机转子转动,αβ是两相静止坐标系,dq是两相旋转坐标系。

图1-2 Park坐标变换示意图1
由第二期内容可知,Park变换式为:

1.3、功率计算
电机功率可以计算为:

二、依据空间矢量等效变换
遵循的两个原则:
a、变换前后电流所合成的空间矢量等效;
b、变换前后两系统的电机输出功率不变;
2.1、Clarke变换
图2-1中空间矢量Is在αβ轴上的投影分别为ia、iβ,且与A轴夹角为φ。

图2-1 Clarke坐标变换矢量示意图2
根据图2-1所示可以得到三相电流与空间矢量Is关系式为:

同理可以得到两相静止坐标系中电流ia、iβ与空间矢量Is关系式为:

根据三角恒等式:

根据三角恒等式(1.13)将式(1.12)变化为:

写成矩阵形式为:
同样,引入零轴变量:

将式(1.16)代入式(1.15)中可以得到新的矩阵形式为:

那么Clarke变换矩阵为:

2.2、Park变换
同样,图2-2是两相旋转坐标系转速w随着电机转子转动,αβ是两相静止坐标系,dq是两相旋转坐标系。

图2-2 Park坐标变换示意图2
由第二期内容可知,Park变换式为:

2.3、功率计算
电机功率可以计算为:

三、总结
由磁动势守恒计算出的电机功率为:

由空间矢量守恒计算出的电机功率为:

两种变换存在一个3/2的系数区别,主要是各自采用了不同的变换形式,最后得出的功率都是对的!
更多精彩内容请关注:
-
相关阅读:
笔记本电脑数据怎么恢复?笔记本电脑数据恢复用什么工具?
ContOS 7 修改IP地址
OSError: Can‘t load tokenizer for ‘bert-base-chinese‘
基于Python实现的语音特征提取声音信号处理
十八、Linux任务调度crond和at
一文搞懂什么是 PostCSS
SQLite 3.4.60 版本发布,带来优化器和函数增强!
中国电影票房排行数据爬取及分析可视化
学神经网络需要什么基础,神经网络从入门到精通
对计算思维的培养
- 原文地址:https://blog.csdn.net/xiaoxiaodawei/article/details/126492445