-
8月22日计算机视觉理论学习笔记——常见 CNN
前言
本文为8月22日计算机视觉理论学习笔记,分为两个章节:
- 常见 CNN;
- CNN 设计准则。
一、常见 CNN
1、AlexNet
- 5个卷积层 + 3个全连接层;
- 60M 个参数 + 650K 个神经元;
- 新技术:
- ReLu;
- Max pooling;
- Dropout。
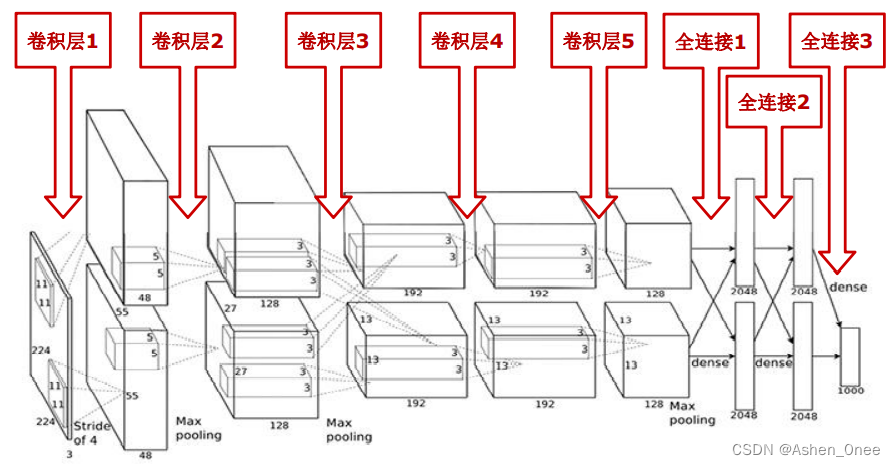
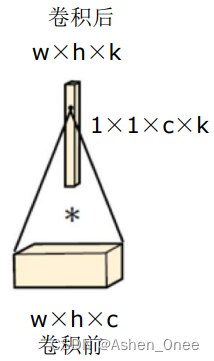
输入层 224×224×3 卷积层1 96×11×11×3 ⇒ LRN ⇒ MP ⇒ ReLu 卷积层2 256×5×5×48 ⇒ LRN ⇒ MP ⇒ ReLu 卷积层3 384×3×3×256 ⇒ ReLu 卷积层4 384×3×3×192 ⇒ MP ⇒ ReLu 卷积层5 256×3×3×192 ⇒ ReLu 全连接层1 4096 ⇒ ReLu 全连接层2 4096 ⇒ ReLu 全连接层3 1000 ⇒ ReLu Softmax层 1000 Loss 4096 ⇒ ReLu - 1×1 卷积: 实现同一个像素点上的各个通道的值的线性组合。作用有:
- 跨通道的交互和信息整合;
- 卷积核通道数的降维和升维。
2、VGG
- 核分解:7×7核 ⇒ 3个 3×3核(ReLu 连接),参数数量: 49 c 2 49c^2 49c2 ⇒ 27 c 2 27c^2 27c2;
- 减少参数,降低计算,增加深度。

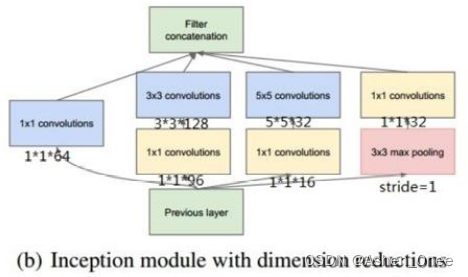
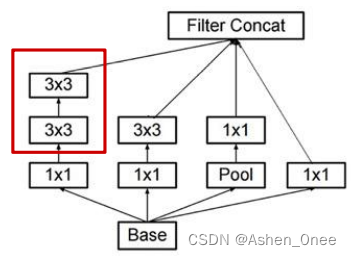
3、GoogLeNet
(1)、Inception V1
- 核心组件:Inception Achitecture
- Split-Merge ⇒ 1×1 卷积、3×3 卷积、5×5 卷积、3×3 池化:增加网络对多尺度的适应性、增加网络宽度;
- Bottleneck Layer ⇒ 使用 NiN 的1×1 卷积进行特征降维。
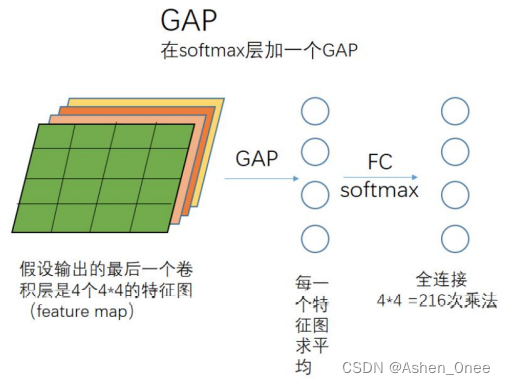
- 取消全连接层;
- 全局平均池化 GAP: 针对整张 feature map:
(2)、Inception V2
- 核心组件:Batch Normalization:
- 使每一层的输出都规范化到 N ( 0 , 1 ) N~(0, 1) N (0,1);
- 允许较高学习率;
- 5×5 卷积核 ⇒ 2个 3×3 卷积核;
- Batch Normalization 的位置: 卷积 ⇒ BN ⇒ ReLu。
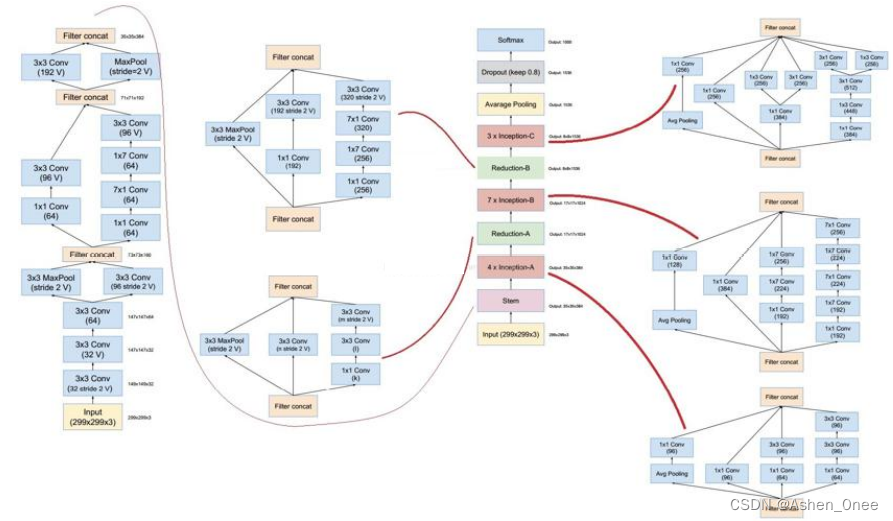
(3)、Inception V3
- 核心组件:非对称卷积:
- N×N 分解成 1×N & N×1;
- 降低参数数量和计算量。
(4)、Inception V4
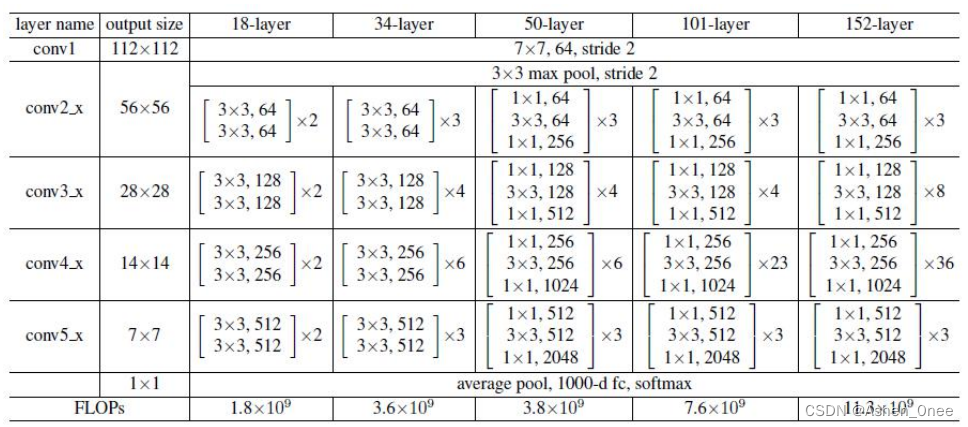
4、ResNet
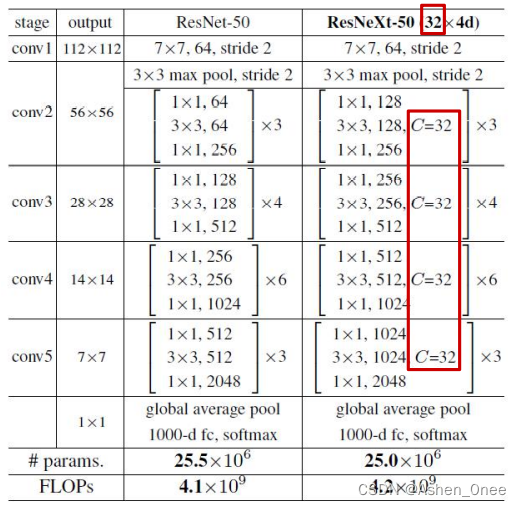
5、ResNeXt
- 提出“深”和“宽”之外的第三个维度:
- 基数 cardinality:
- 采用 Split-Transform-Aggregate 策略:
- 将卷积核按通道分组,形成 32个并行分支;
- 低维度卷积进行特征变换;
- 加法合并。
- 采用 Split-Transform-Aggregate 策略:
- 基数 cardinality:
- 100层 ResNeXt = 200层 ResNet
二、CNN 设计准则
- 避免信息瓶颈:
- 卷积过程中:
- 空间尺寸 H×W 逐渐变小;
- 输出通道数 C 逐渐变多。
- H × W × C 要缓慢变小。
- 卷积过程中:
-
卷积核的通道数量保持在可控范围内:
- 参数数量 = H × W × C × K。
-
感受野要足够大:
- 多个小尺寸卷积核好于一个大尺寸卷积核:
- 参数少,计算快;
- 多个非线性激活。
- 多个小尺寸卷积核好于一个大尺寸卷积核:
-
分组策略 ⇒ 降低计算量
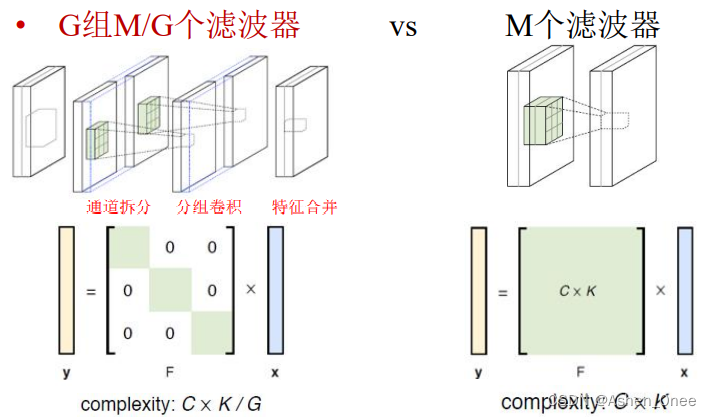
-
相关阅读:
蔚来汽车智能座舱Java面经(23 秋招提前批)
SpringCloud复习:(5) feign的底层原理
编译原理—计算三地址码、布尔语句翻译
Docker的运用场景 103.53.124.2
矩阵分析与应用-14-行列式
Java多线程篇(12)——ForkJoinPool
15 DOM 扩展
k8s搭建pinpoint链路追踪
智慧家庭中的人体动作识别研究综述
【计组】指令系统
- 原文地址:https://blog.csdn.net/Ashen_0nee/article/details/126458742