-
数据结构(C++)[B树(B-树)插入与中序遍历,效率分析]、B+树、B*树、B树系列应用
1. B树(B-树)
B树系列常用作查找使用(外查找)
B树使用场景:
数据量很大,无法直接讲数据放入内存中,这些数据在磁盘上。B树的结构中,树中的节点保存的是数据在磁盘中的位置。
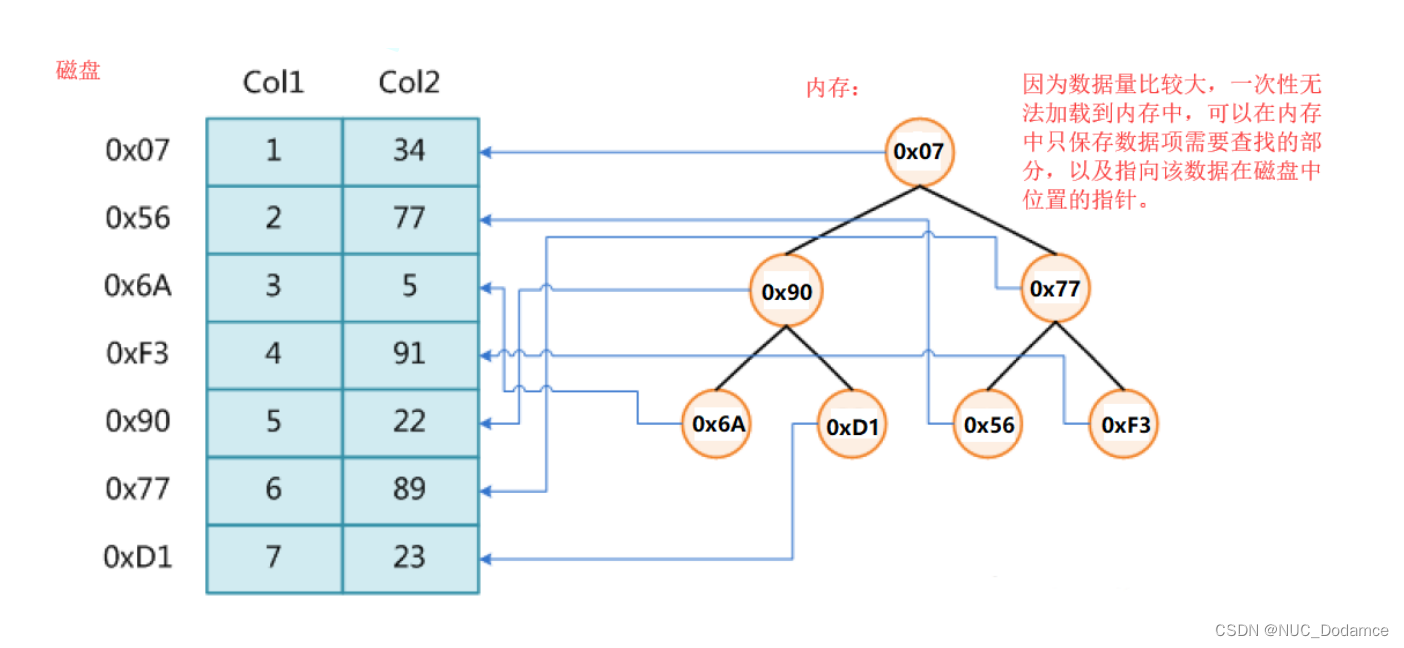
但是如果B树是类似AVL树,红黑树或哈希表的话,涉及大量的访问磁盘操作,效率太低。B树采用的是优化AVL树的方式提高效率
- 将普通的AVL树进行压缩(单层存更多),二叉树变成多叉树。
- 一个节点有多个关键字和其映射的值
B树的规则
一棵m阶(m>2)的B树,是一棵平衡的M路平衡搜索树,可以是空树或者满足一下性质:
- 根节点至少有两个孩子
- 每个分支节点都包含k-1个关键字和k个孩子,其中 ceil(m/2) ≤ k ≤ m ceil是向上取整函数(分支节点,孩子比关键字多一个,eg:10阶B树,每个分支节点最少包含5个孩子,4个关键字。最多包含10个孩子,9个关键字)
- 每个叶子节点都包含k-1个关键字,其中 ceil(m/2) ≤ k ≤ m
- 所有的叶子节点都在同一层
- 每个节点中的关键字从小到大排列,节点当中k-1个元素正好是k个孩子包含的元素的值域划分
- 每个结点的结构为:(n,A0,K1,A1,K2,A2,… ,Kn,An)其中,Ki(1≤i≤n)为关键字,且Ki
B树插入过程
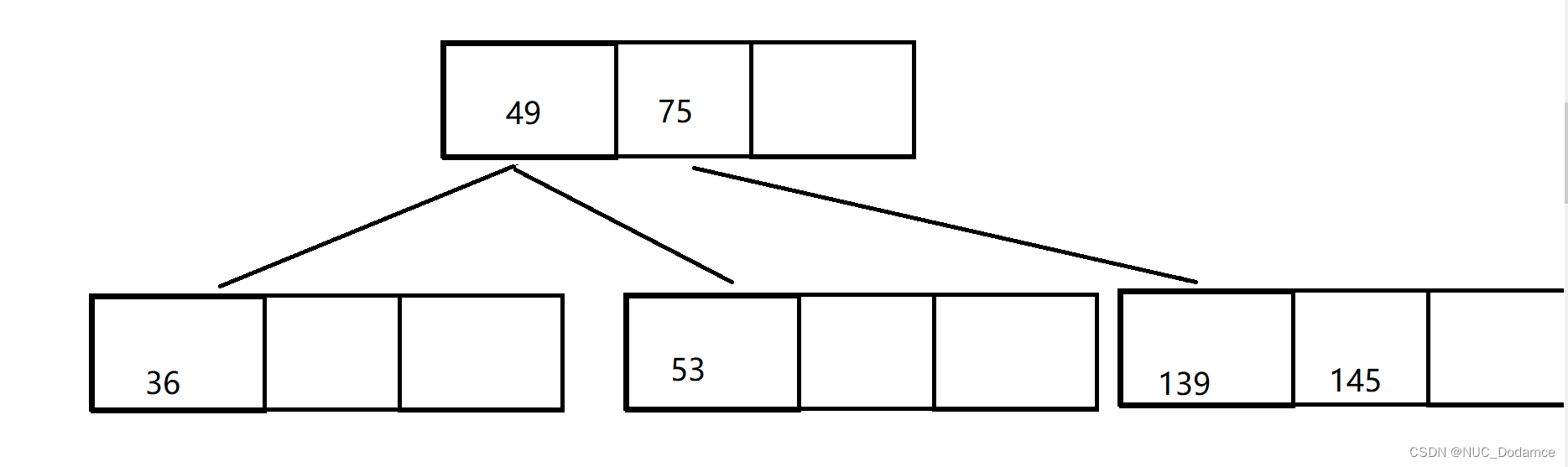
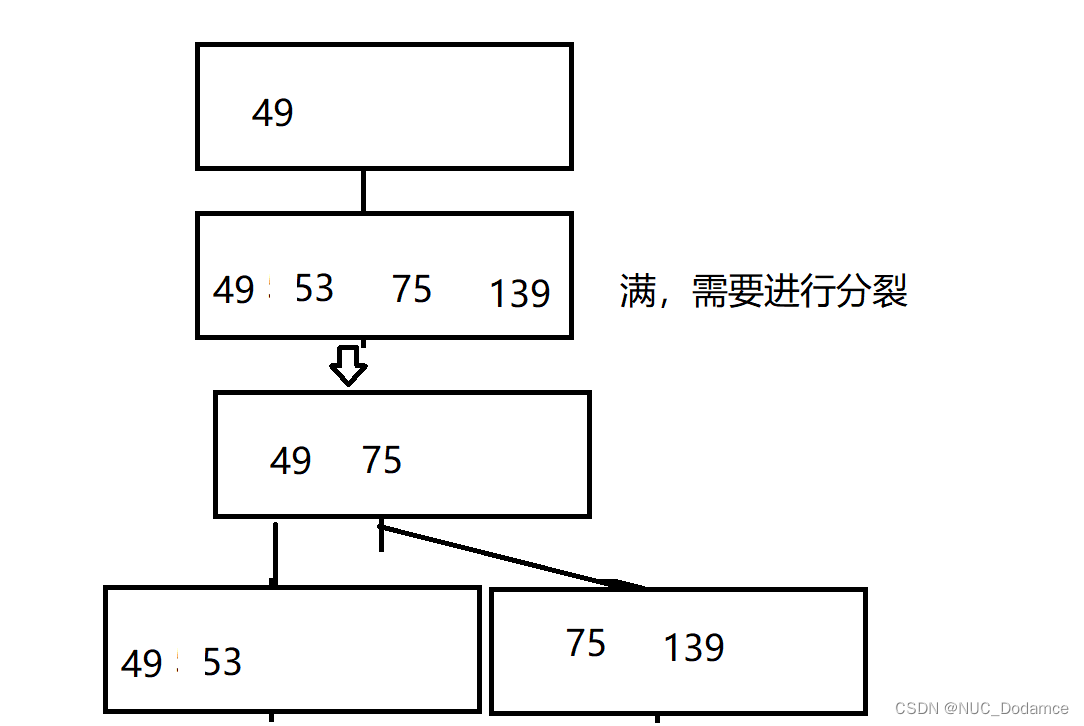
eg:三阶B树插入关键字(53, 139, 75, 49, 145, 36, 50, 47, 101)
节点最多保存2个关键字,最少保存1个关键字。根节点单独看
- 根节点最多可以保存2个关键字,为了简化插入操作,开辟三个关键字大小,当插入后发现已经满了时再进行分裂。同时多开辟一个空间也有助于在插入时进行排序。
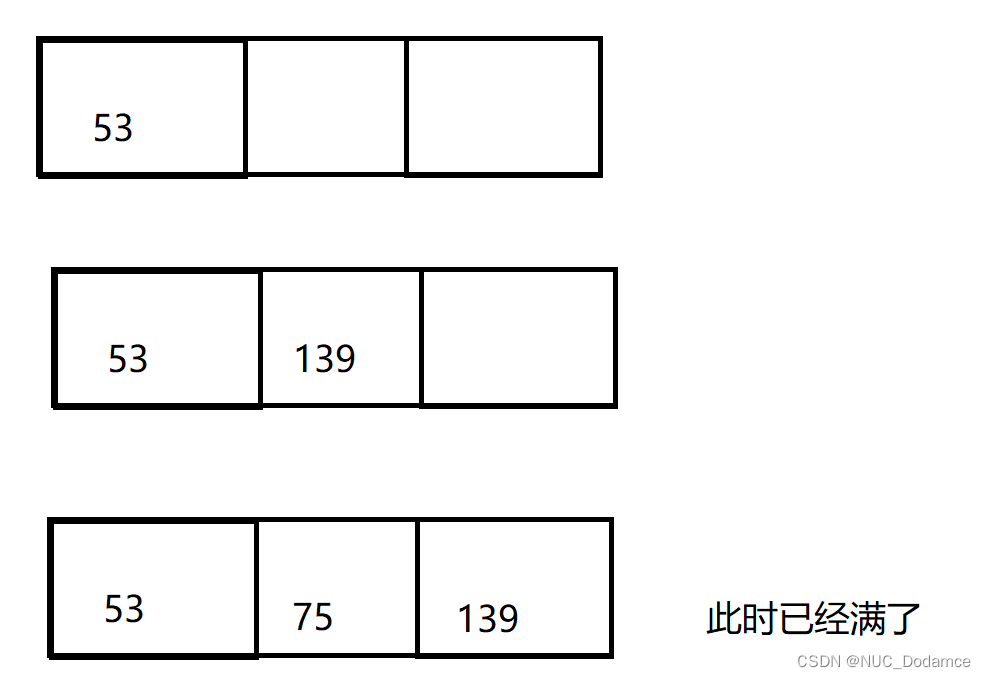
- 如果节点满了,分裂右边一半关键字个数的一般给兄弟节点。提取中位数给父亲,没有父亲就创建新的根节点
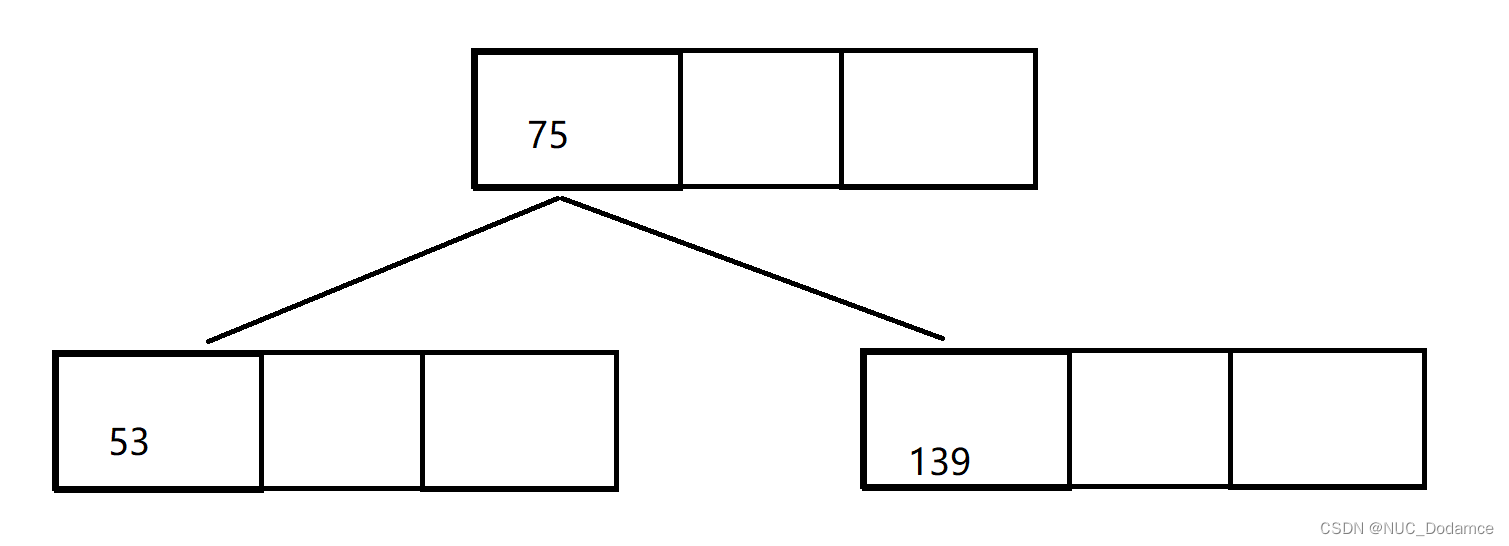
- 继续插入49等后续关键字。
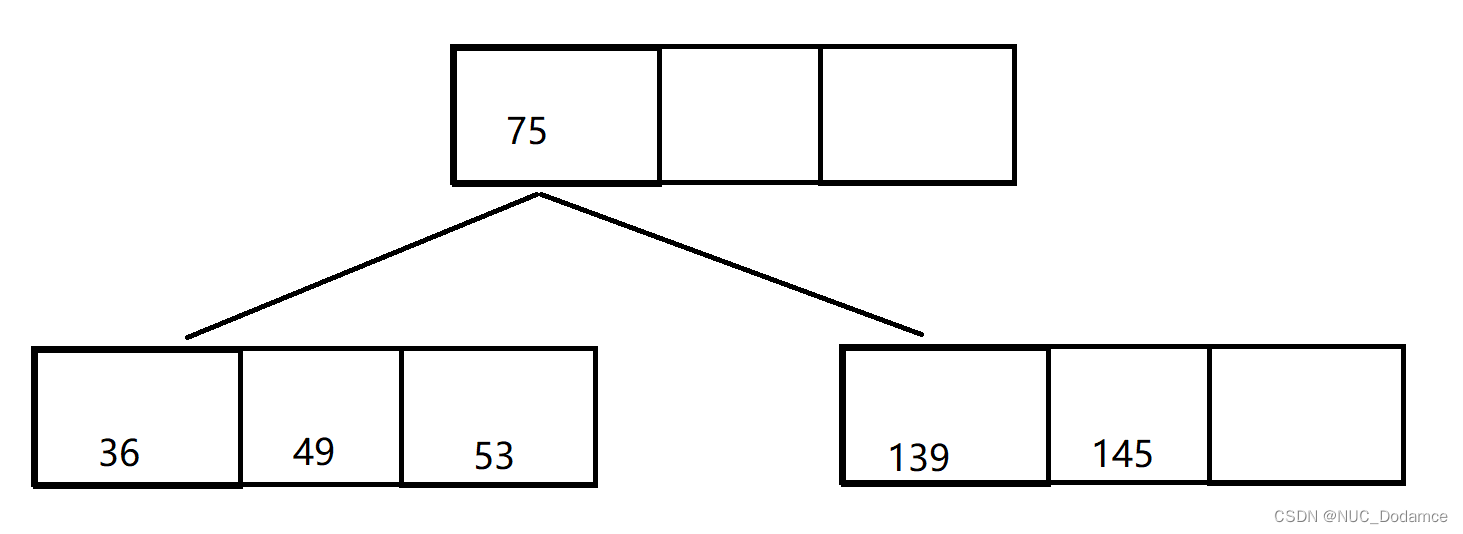
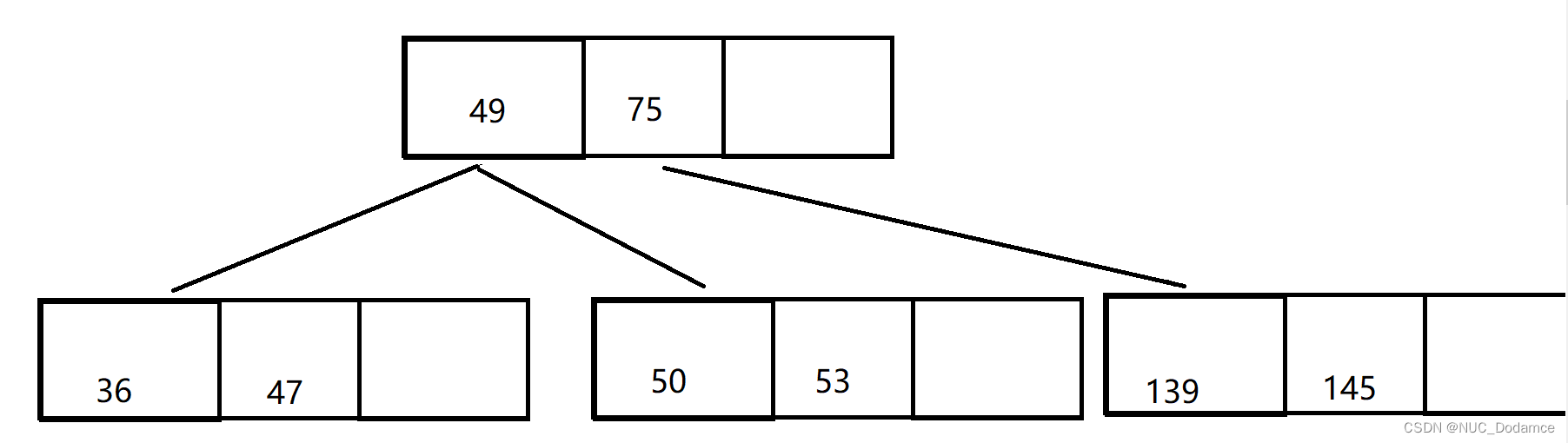
此时节点又满了,需要进行分裂。
- 继续插入50和47这两个关键字。
- 最后插入101,导致叶子节点满,需要进行分裂
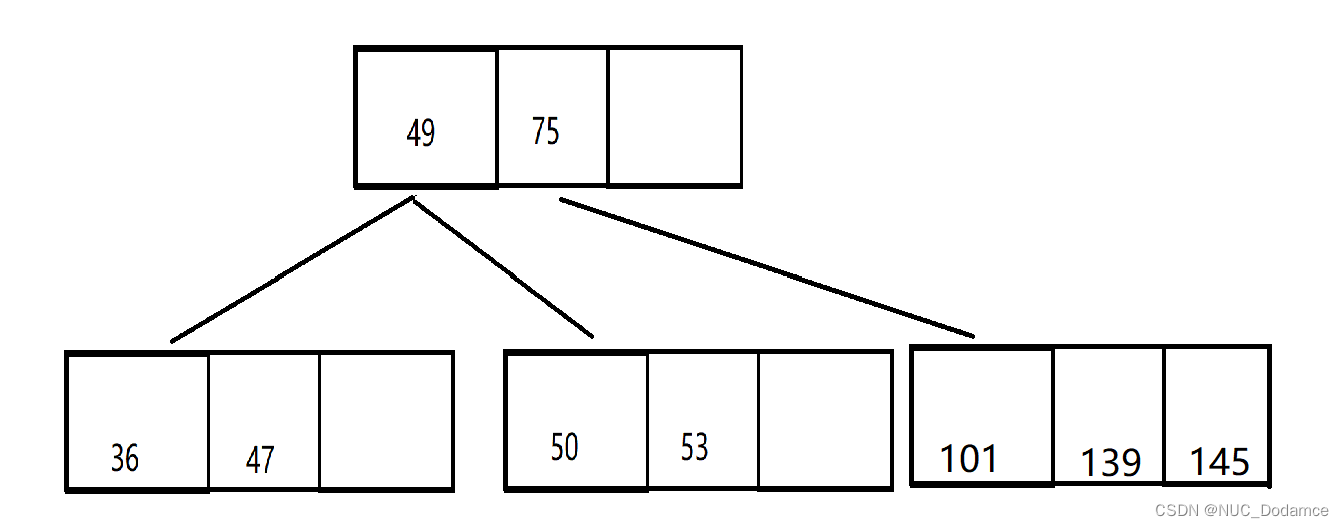
这次分裂会导致两次连续分裂
第一次分裂导致根节点满
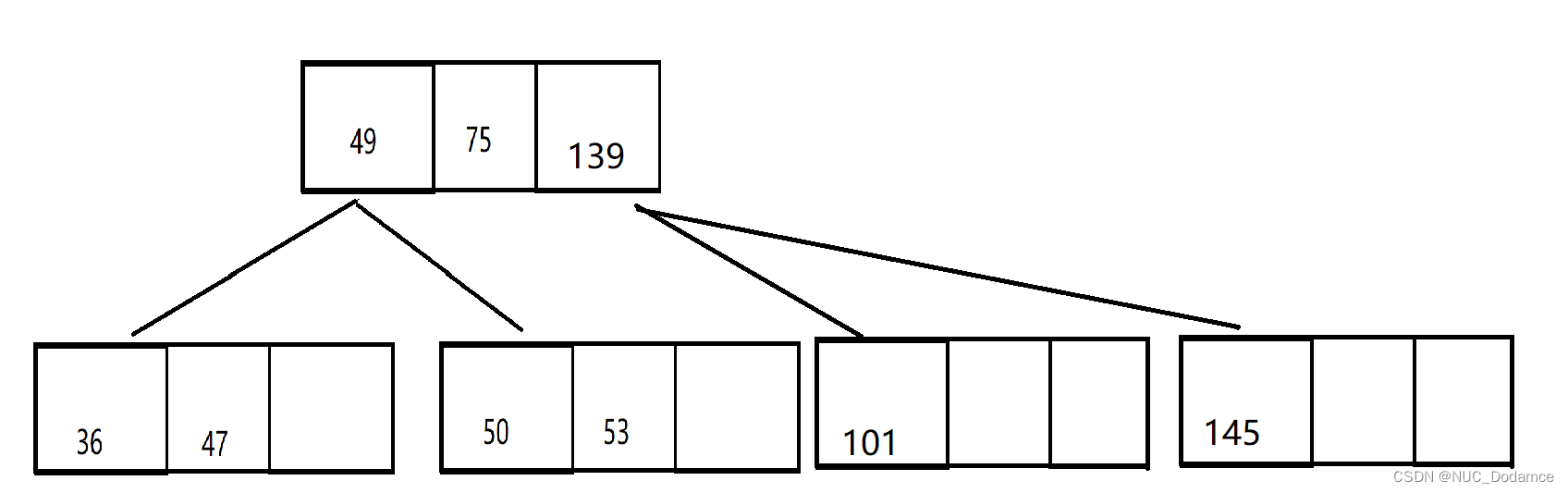
继续分裂根节点,产生新的根节点
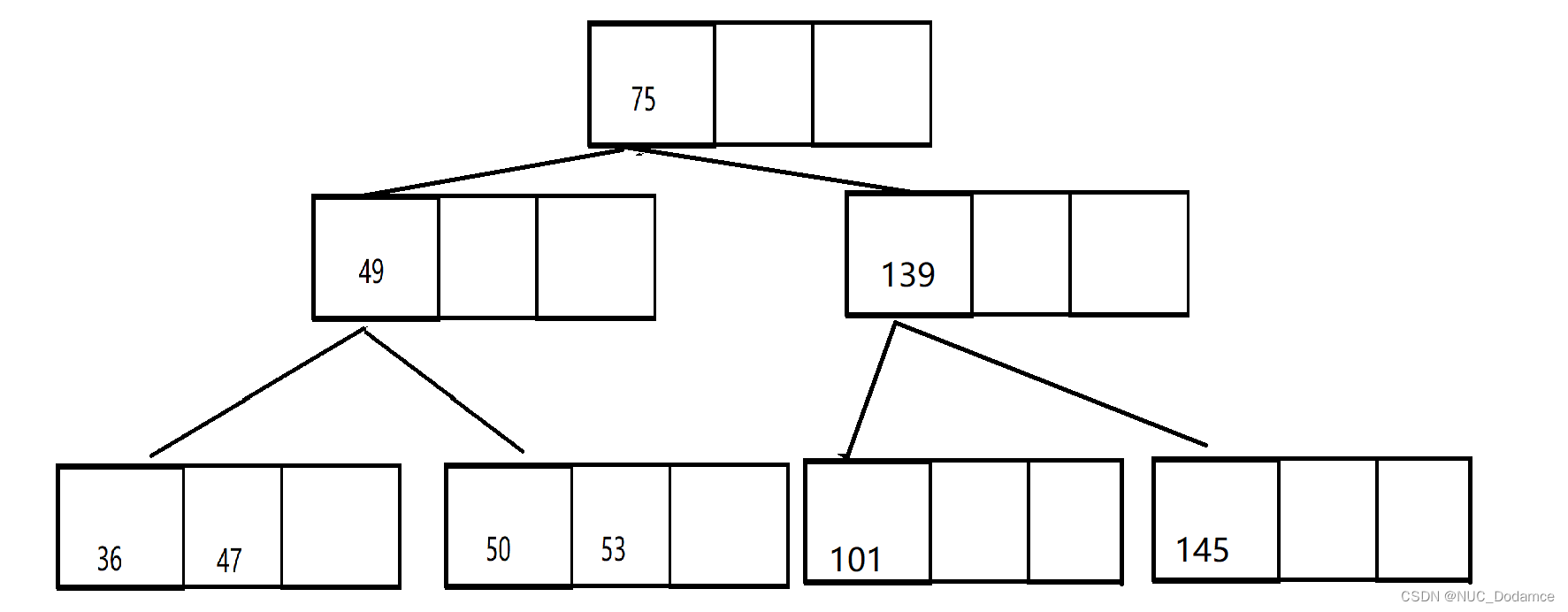
插入完毕特点
- B树天然平衡,B树是先横向扩展,再竖直生长。所以B树天然平衡
- 新插入的节点一定在叶子插入,叶子节点没有孩子,不影响关键字和孩子的关系
- 叶子节点满了,分裂出一个兄弟,提取中位数,向父亲插入一个值和孩子
- 根节点分裂会增加一层
- 对于B树的每一个节点,这个节点的孩子个数比关键字个数多一个。
C++模拟实现B树插入与中序遍历
#pragma once #includetemplate<class K, size_t M> struct BTreeNode { //多开辟一个空间方便插入 K _keys[M]; BTreeNode<K, M>* _subs[M + 1]; BTreeNode<K, M>* _parent;//这个节点的父节点 size_t _n;//记录实际存储关键字个数 BTreeNode() { for (size_t i = 0; i < M; i++) { _keys[i] = K(); _subs[i] = nullptr; } _subs[M] = nullptr; _n = 0; _parent = nullptr; } }; //数据如果存在磁盘上,K是磁盘地址 template<class K, size_t M> class BTree { typedef BTreeNode<K, M> Node; public: //查找要插入的叶子节点对应的下标 std::pair<Node*, int>Find(const K& key) { Node* par = nullptr; Node* cur = _root; while (cur) { //在一个节点中查找 size_t i = 0; while (i < cur->_n) { if (key < cur->_keys[i]) { //_key[size]的左孩子 break; } else if (key > cur->_keys[i]) { i++; } else { return std::make_pair(cur, i); } } par = cur;//记录cur的父节点 cur = cur->_subs[i]; } return std::make_pair(par, -1); } bool Insert(const K& key) { if (_root == nullptr) { _root = new Node; _root->_keys[0] = key; _root->_n++; return true; } std::pair<Node*,int> ret = Find(key); if (ret.second >= 0) { //不允许冗余 return false; } //如果没有找到,Find函数返回要插入的叶子节点 Node* cur = ret.first; K newKey = key; Node* child = nullptr; while (true) { InsertKey(cur, newKey, child); if (cur->_n == M) { //这个节点满了,需要分裂 size_t mid = M / 2; //node中有[mid+1,M-1]的数据 Node* node = new Node; size_t pos = 0; //同时还要拷贝孩子节点 for (int i = mid + 1; i < M; i++) { node->_keys[pos] = cur->_keys[i]; node->_subs[pos] = cur->_subs[i]; if (cur->_subs[i] != nullptr) { //更新父节点 cur->_subs[i]->_parent = node; } pos++; cur->_keys[i] = K();//方便观察 cur->_subs[i] = nullptr; } //最后一个子节点拷贝 node->_subs[pos] = cur->_subs[M]; if (cur->_subs[M] != nullptr) { //更新父节点 cur->_subs[M]->_parent = node; } cur->_subs[M] = nullptr; node->_n = pos; cur->_n -= pos + 1;//还要提取一个节点作为这两个节点的父节点 K midKey = cur->_keys[mid]; cur->_keys[mid] = K();//方便调试观察 //向cur->parent插入cur->_keys[mid]和node节点 if (cur->_parent == nullptr) { //分裂根节点 _root = new Node; _root->_keys[0] = midKey; _root->_subs[0] = cur; _root->_subs[1] = node; _root->_n = 1; cur->_parent = _root; node->_parent = _root; break; } newKey = midKey; child = node; cur = cur->_parent;//while循环插入 } else { //节点没有满,插入结束 return true; } } return true; } //中序遍历 void Inorder() { _Inorder(_root); } private: void _Inorder(Node* root) { if (root == nullptr) { return; } for (size_t i = 0; i < root->_n; i++) { _Inorder(root->_subs[i]); std::cout << root->_keys[i] << " "; } //最后还剩余一个右子树 _Inorder(root->_subs[root->_n]); } void InsertKey(Node* cur, const K& key, Node* child) { int endPos = cur->_n - 1; while (endPos >= 0) { if (key < cur->_keys[endPos]) { //挪动key和右孩子 cur->_keys[endPos + 1] = cur->_keys[endPos]; cur->_subs[endPos + 2] = cur->_subs[endPos + 1]; endPos -= 1; } else { break; } } cur->_keys[endPos + 1] = key; cur->_subs[endPos + 2] = child; if (child != nullptr) { child->_parent = cur; } cur->_n += 1; } Node* _root = nullptr; }; - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
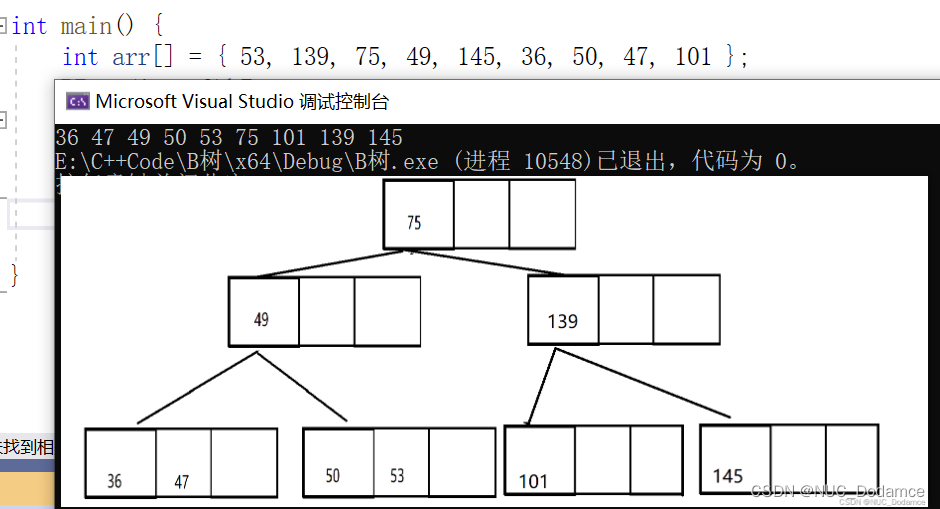
测试代码:
#include"BTree.h" int main() { int arr[] = { 53, 139, 75, 49, 145, 36, 50, 47, 101 }; BTree<int, 3>bTree; for (auto& e : arr) { bTree.Insert(e); } bTree.Inorder(); return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
B树效率分析
时间复杂度:
设B树高度为h
第一层B树保存关键字个数大致为m个
第二层B树保存关键字个数大致为m^2
设B树总关键字个数为N
N=m + m ^ 2 + m ^ 3 +……+m ^ h计算得到
-m+m^(h+1)=N*m-N最终得到
h+1=logm[(N*m)-N+m]其中N远大于m所以最终B树的时间复杂度为
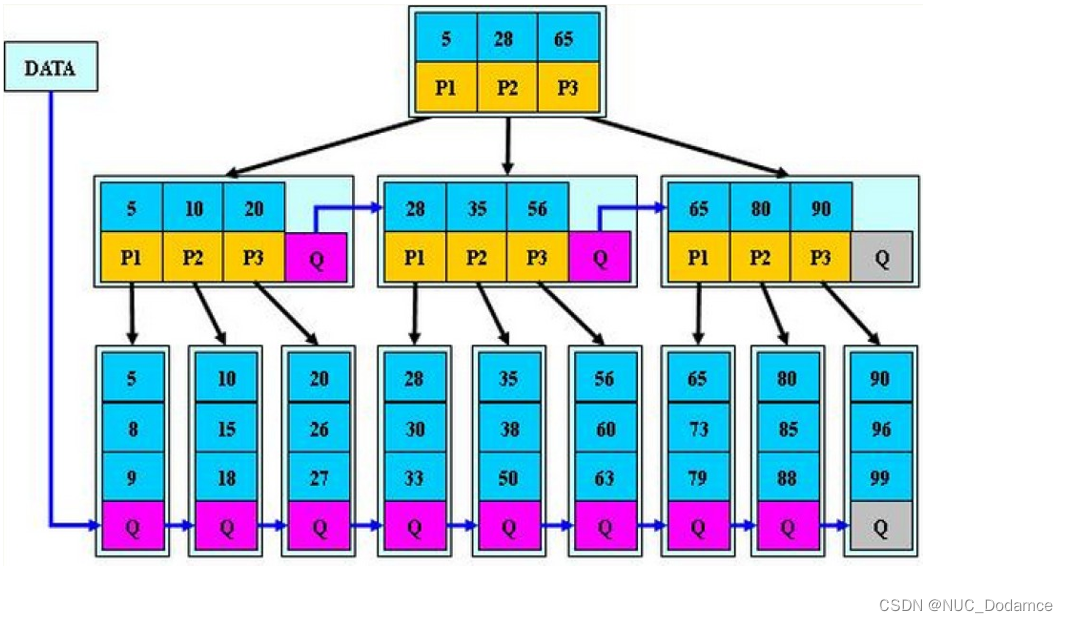
O(logm(N))2. B+树
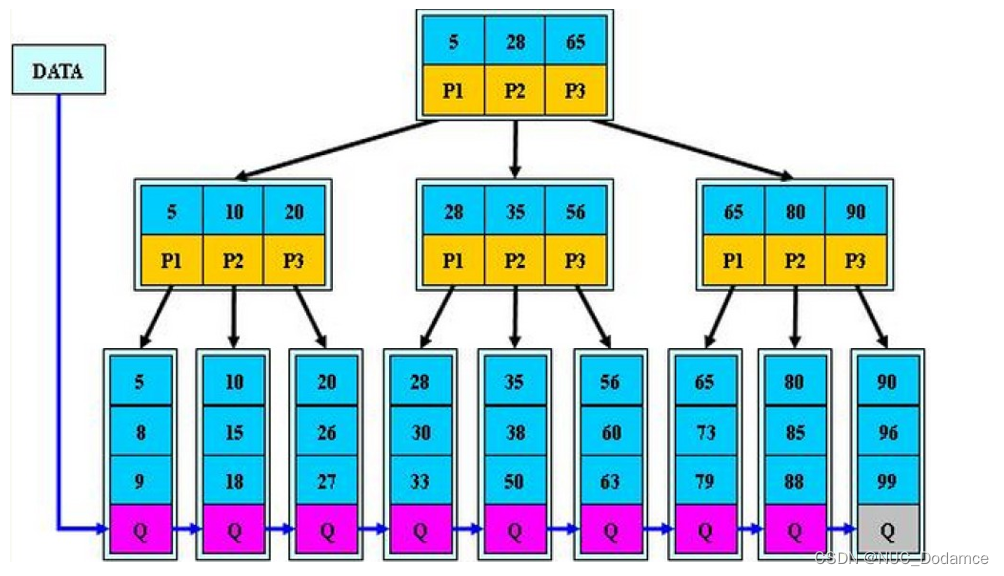
B+树是B树的变形,是在B树的基础上优化的多路平衡搜索树,B+树的规则与B树基本类似。
B+树优化的规则如下
- 分支节点的子树指针与关键字个数相同
- 分支节点的子树指针p[i]指向关键字大小在[ k[i],k[i+1] ]区间之间(相比于B树取消了最左边的子树)
- 所有叶节点增加一个链接指针链接在一起
- 所有关键字及其映射数据都在叶子节点出现。
分支节点和叶子节点又重复的值,分支节点保存叶子节点的索引
父节点保存子节点最小值作为索引
对于Key-Value形,子节点保存key值,叶子节点保存value值
B+树插入过程
三阶B树插入关键字(53, 139, 75, 49, 145, 36, 101)
- 开始时建立最基本的B+树结构,m=3每个节点可以保存3个关键字
插入53,139,75的过程
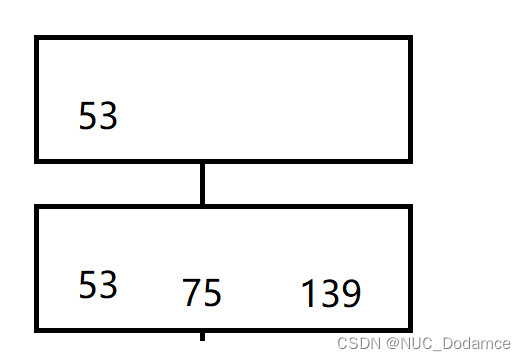
- 之后插入49,需要进行分裂
3. B*树
B*树是B+树的变形,在B+树的非根和非叶子节点再增加指向兄弟节点的指针
B*树想提高空间利用率B*树分裂规则
- 当一个结点满时,如果它的下一个兄弟结点未满,那么将一部分数据移到兄弟结点中,再在原结点插入关键字,最后修改父结点中兄弟结点的关键字(因为兄弟结点的关键字范围改变了)
- 如果兄弟也满了,则在原结点与兄弟结点之间增加新结点,并各复制1/3的数据到新结点,最后在父结点增加新结点的指针。
所以,分裂后原节点,兄弟节点,新节点各个都有2/3的数据,B*树分配新结点的概率比B+树要低,且新节点与原来节点的数据均分,空间使用率更高
4. B树应用
B树系列可以在内存中做内查找。但是相比于哈希和平衡搜索树
- 从空间利用率来讲消耗高。
- 插入删除数据,分裂合并节点,需要挪动数据
- B树的高度低,但是在内存中来讲,跟哈希和平衡搜索树是一个量级。
B树系列通常在内存中体现不出优势
B树系列通常在磁盘中可以体现出优势
B树系列通常的应用作为索引使用,MySQL数据库索引底层原理是B+树
B+树索引磁盘数据
-
相关阅读:
Golang slice 通过growslice调用nextslicecap计算扩容
趣谈网络协议_1
Excel宏标记在所有工作表中标记关键字(以域名为例)并将结果输出到另一张Sheet
【Linux成长史】Linux权限的详细讲解
小程序-uniapp:URL Link / 适用于在移动端 从短信、邮件、微信外网页 等场景打开小程序任意页面
图观引擎V3.3.4 功能更强、操作更便捷!最新升级一睹为快
网络基础-2
统计力学中的概率论基础(一)
ZZULIOJ:1158: 又是排序(指针专题)
使用树莓派搭建文件共享服务器-samba服务器
- 原文地址:https://blog.csdn.net/dodamce/article/details/126370819
