-
详解xacro语法并优化封装urdf
0 专栏介绍
本专栏旨在通过对ROS的系统学习,掌握ROS底层基本分布式原理,并具有机器人建模和应用ROS进行实际项目的开发和调试的工程能力。
🚀详情:《ROS从入门到精通》
1 xacro文件是什么?
XML 宏语言(XML Macros, Xacro)是可编程的XML文件。在xacro中可以声明变量,可以通过数学运算求解,使用流程控制控制执行顺序,还可以通过类似函数的实现,封装固定的逻辑,将逻辑中需要的可变的数据以参数的方式暴露出去,从而提高代码复用率以及程序的安全性。简言之,xacro为urdf文件提供了封装性,使机器人描述更安全、更精简、更高效。
2 xacro语法详解
在使用xacro生成urdf时,根标签
robot中必须包含命名空间声明:xmlns:xacro="http://wiki.ros.org/xacro",例如:<robot name="left_drive_wheel" xmlns:xacro="http://www.ros.org/wiki/xacro">- 1
xacro主要为xml提供了封装,相较于一般的编程语言更容易上手,具体如下:
2.1 属性
xacro属性采用键值对的方式,封装urdf中的一些常量字段,比如: 小车尺寸、轮子半径等,使数据语义更清晰易懂,语法格式如下
<xacro:property name="xxxx" value="yyyy" />- 1
属性调用格式为
${property_name}- 1
数值属性也可参与数学运算
${f(property_name)}- 1
2.2 宏
xacro宏类似于函数封装,可以提高代码复用率,优化代码结构,语法格式如下
<xacro:macro name="宏名称" params="参数列表(多参数之间使用空格分隔)"> ..... 参数调用格式: ${参数名} xacro:macro>- 1
- 2
- 3
- 4
宏调用格式为
<xacro:宏名称 参数1=xxx 参数2=xxx/>- 1
2.3 模块化
xacro模块化类似于C++中头文件的含义,提供模块级别的封装。一般机器人由多个组件构成,不同组件就可以封装为单独的xacro文件,最后再将不同的文件集成为完整机器人,语法格式如下
<robot name="xxx" xmlns:xacro="http://wiki.ros.org/xacro"> <xacro:include filename="y1.xacro" /> <xacro:include filename="y2.xacro" /> <xacro:include filename="y3.xacro" /> .... robot>- 1
- 2
- 3
- 4
- 5
- 6
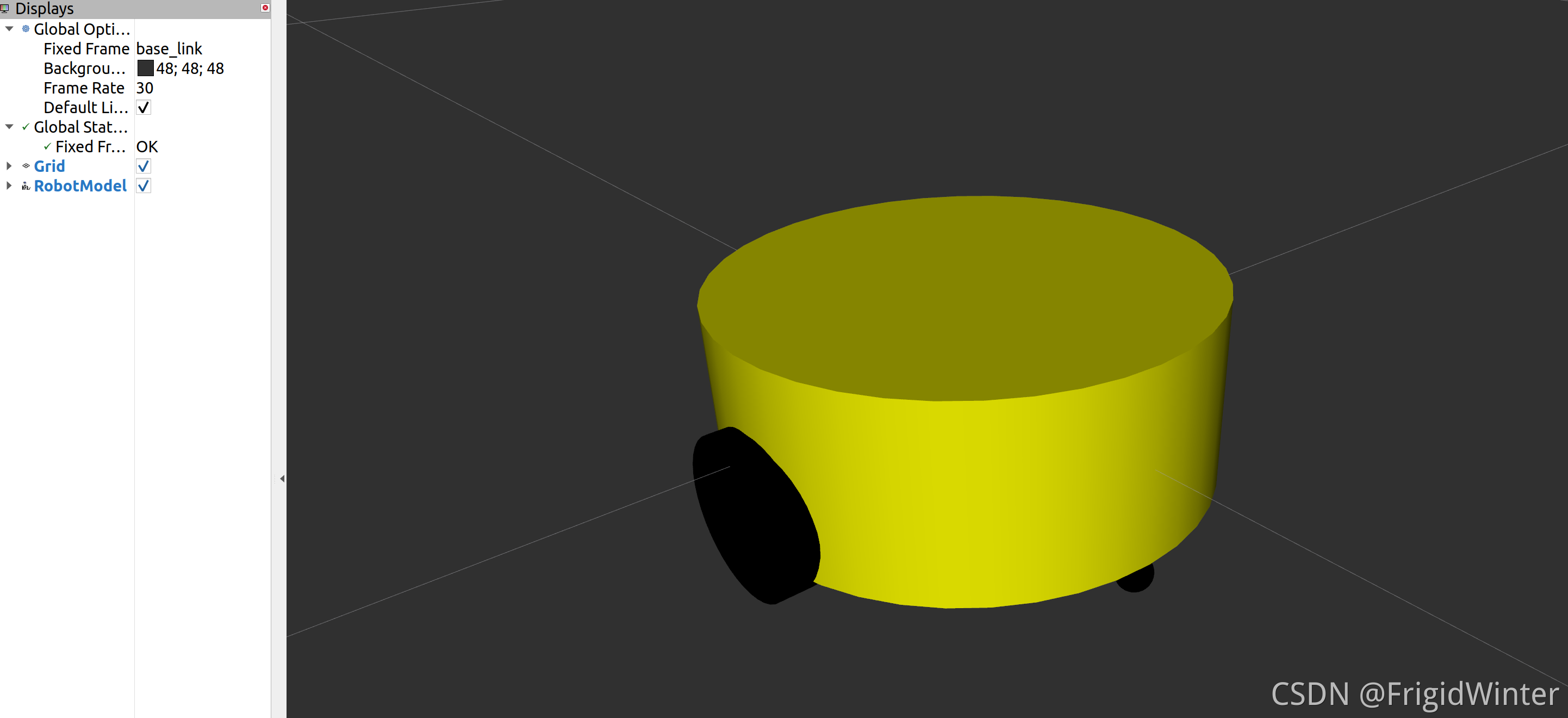
3 案例:差速轮式机器人描述
实现如下图所示的差速轮式移动机器人,它有两个驱动轮和两个主动轮。接下来用xacro文件进行封装。
最终的目录结构如图所示
3.1 属性
props文件夹中存放属性配置模块,如颜色、数学常数、几何参数等。<robot name="config" xmlns:xacro="http://www.ros.org/wiki/xacro"> <xacro:property name="PI" value="3.141"/> <xacro:property name="base_footprint_radius" value="0.001" /> <xacro:property name="base_link_radius" value="0.1" /> <xacro:property name="base_link_length" value="0.08" /> <xacro:property name="earth_space" value="0.015" /> <xacro:macro name="black"> <material name="black"> <color rgba="0 0 0 1"/> material> xacro:macro> <xacro:macro name="yellow"> <material name="yellow"> <color rgba="1.0 1.0 0.0 1.0" /> material> xacro:macro> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
3.2 底盘
<robot name="base" xmlns:xacro="http://www.ros.org/wiki/xacro"> <xacro:include filename="$(find xacro_lab)/urdf/props/config.urdf.xacro" /> <link name="base_footprint"> <visual> <geometry> <sphere radius="${base_footprint_radius}" /> geometry> visual> link> <link name="base_link"> <visual> <geometry> <cylinder radius="${base_link_radius}" length="${base_link_length}" /> geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <xacro:yellow /> visual> link> <joint name="base_link2base_footprint" type="fixed"> <parent link="base_footprint" /> <child link="base_link" /> <origin xyz="0 0 ${earth_space + base_link_length / 2 }" /> joint> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
3.3 轮子
限于篇幅只展示驱动轮
<robot name="add_drive_wheels" xmlns:xacro="http://www.ros.org/wiki/xacro"> <xacro:include filename="$(find xacro_lab)/urdf/props/config.urdf.xacro" /> <xacro:property name="wheel_radius" value="0.0325" /> <xacro:property name="wheel_length" value="0.015" /> <xacro:macro name="add_drive_wheels" params="name flag"> <link name="${name}_wheel"> <visual> <geometry> <cylinder radius="${wheel_radius}" length="${wheel_length}" /> geometry> <origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" /> <xacro:black /> visual> link> <joint name="${name}_wheel2base_link" type="continuous"> <parent link="base_link" /> <child link="${name}_wheel" /> <origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }" /> <axis xyz="0 1 0" /> joint> xacro:macro> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
3.4 集成
将所有模块集成起来,非常简洁
<robot name="main" xmlns:xacro="http://www.ros.org/wiki/xacro"> <xacro:include filename="$(find xacro_lab)/urdf/base/base.urdf.xacro" /> <xacro:include filename="$(find xacro_lab)/urdf/wheels/add_drive_wheels.urdf.xacro" /> <xacro:include filename="$(find xacro_lab)/urdf/wheels/add_support_wheels.urdf.xacro" /> <xacro:add_drive_wheels name="left" flag="1" /> <xacro:add_drive_wheels name="right" flag="-1" /> <xacro:add_support_wheel name="front" flag="1" /> <xacro:add_support_wheel name="back" flag="-1" /> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
🔥 更多精彩专栏:
👇源码获取 · 技术交流 · 抱团学习 · 咨询分享 请联系👇 -
相关阅读:
九州未来参与编制的《基于C-V2X的智能化网联化融合发展路线图》正式发布!
Python 模拟Hermite Polynomial厄米特多项式
PyQt5入门2——添加一个画布并且显示特定的图片
Ansible中的角色使用
国内低代码开发平台靠谱的都有哪些?
别低头,皇冠会掉;别流泪,贱人会笑。
代码随想录第40天|62.不同路径,63. 不同路径 II
CMake教程-第 12 步:打包调试和发布
CentOS 7离线升级OpenSSH至9.1p1操作过程及遇上的问题
Shiro和Cas的集成
- 原文地址:https://blog.csdn.net/FRIGIDWINTER/article/details/126274865
