-
rtk原理简要说明
目录
一、GPS定位
1.1、简介
GPS全名叫Global Positioning System,全球定位系统,最早起源于美国的军事项目,美国的这种系统叫GPS,我们中国也有全球定位系统,叫北斗;战斗民族也有,叫格洛纳斯;欧盟也有,叫伽利略。
这4套全球定们系统的定位原理基本都是一样的。有了这套系统,我们就可以用它进行导航,引导我们到某地。在军事上那可就厉害了,可用于精准打击,东风快递一送一个准。
其实GPS除了可以定位,还可以授时,也就是告诉你准确的时间,准确的定位与时间有密不可分的联系。
1.2、原理
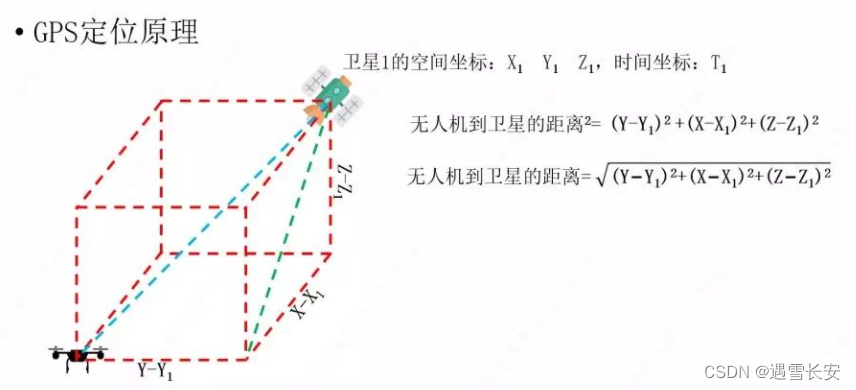
GPS定位是利用一组卫星的伪距、星历、卫星发射时间等观测值来实现的,同时还必须知道用户钟差。我们可以从卫星这里接收一些信息,也就是卫星的星历,星历里面有卫星自己准确的空间坐标X1 Y1 Z1,同时也有一个准确的时间T1,因为卫星有原子钟。卫星会把这些信息发送给GPS接收机。
坐标计算距离就是用勾股定理,用户站到卫星距离的平方=Y-Y1的平方加上这条绿线的长度的平方,绿线长度的平方又等于X-X1的平方加上Z-Z1的平方,所以无人机到卫星的距离等于右面的式子开平方。
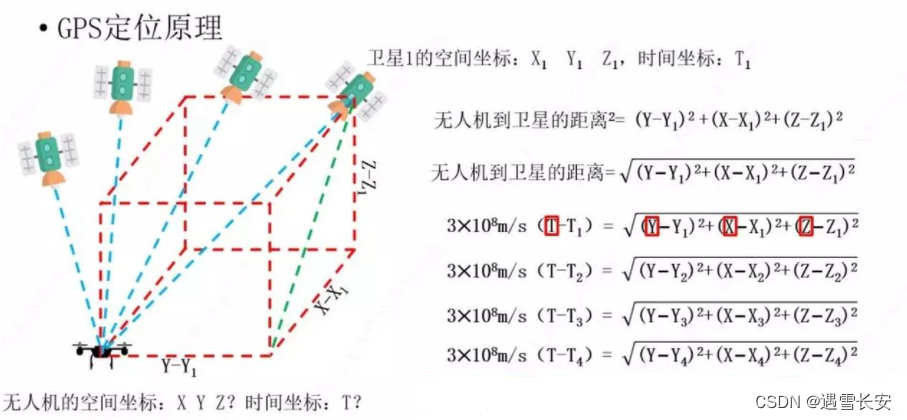
由于接收机时间与卫星原子钟时间存在同步误差,求解方程中増加时间误差的待定变量,因此利用四颗卫星数据,从而同时解出纬度、经度、高程和时间四个未知数,最终实现卫星定位。
1.3、缺陷
在这一定位过程中,卫星工作受到多因素干扰,比如卫星信号穿过电离层、对流层时会发生折射,信号射到建筑上会发生反射,这都会导致信号传播时间计算有误。而卫星信号传播速度近似于光速,极小的时间偏差都会导致定位出现很大的误差。
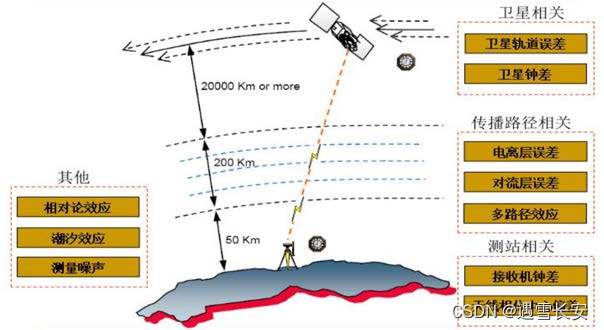
可将传统定位方式中会造成误差的原因大致分为三类。
- 第一类是对每一个用户接收机所公有的,例如,卫星钟误差、星历误差、电离层误差、对流层误差等;
- 第二类是不能由用户测量或由校正模型来计算的传播延迟误差;
- 第三类是各用户接收机所固有的误差,例如内部噪声、通道延迟、多径效应等。
二、差分定位
2.1、简介
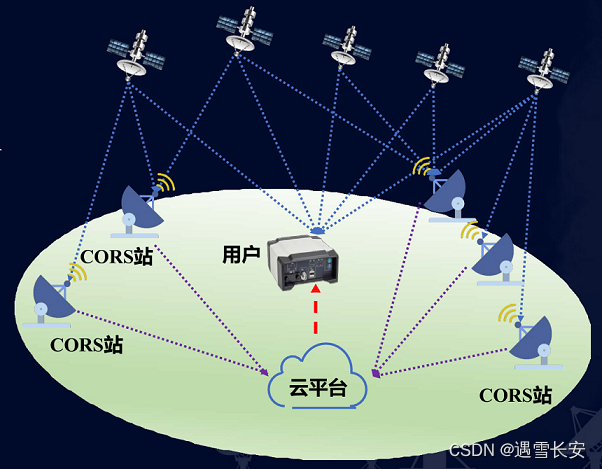
差分定位又指相对定位(我觉得用相对定位来解释更好一点),具体是利用两台/多台GPS接收机,分别安置在基线的两端,同步观测相同的GPS卫星,以确定基线在协议地球坐标系中的相对位置和基线向量。差分定位方法一般可推广到多台接收机安置在若干条基线的端点,通过同步观测GPS卫星,以确定多条基线向量。
差分定位可以消除或减弱一些具有系统性误差的影响,如卫星轨道误差、钟差和大气折射误差等,而绝对定位受卫星轨道误差,钟同步误差及信号传播误差等因素的影响,精度只能达到米级。因此相对定位方法是当前GPS测量定位中精度最高的一种方法,在大地测量、精密工程测量、地球动力学研究和精密导航等精度要求较高的测量工作中被普遍采用。
针对传统GPS定位存在的三类误差利用差分技术,第一部分误差完全可以消除,第二部分误差大部分可以消除,其主要取决于基准接收机和用户接收机的距离,第三部分误差则无法消除。
2.2、原理
根据差分GPS基准站发送的信息方式可将差分GPS定位分为四类,即:精密单点定位、位置差分、伪距差分和载波相位差分。这四类差分方式的工作原理是相同的,即都是由基准站发送修正数据,由用户站接收并对其测量结果进行修正,以获得精确的定位结果。所不同的是,发送修正数据的具体内容不一样,其差分定位精度也不同。
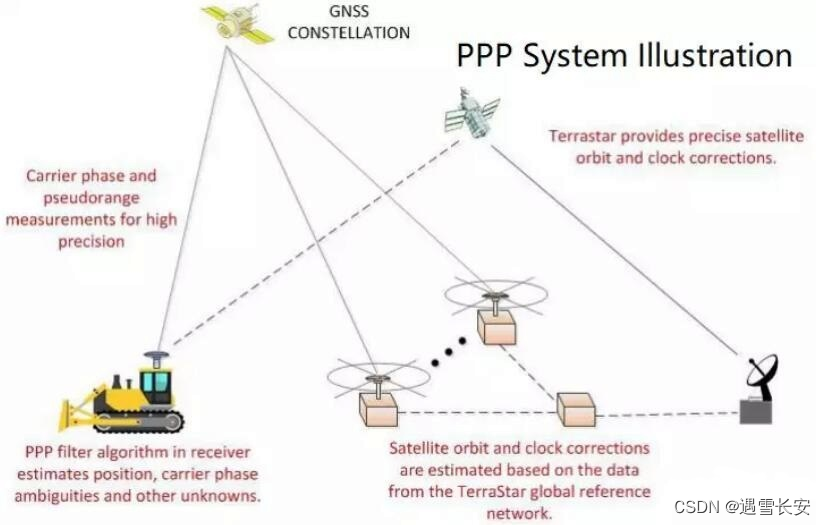
2.2.1、精密单点定位(PPP)
利用全球若干地面跟踪站的观测数据计算出的精密卫星轨道和卫星钟差, 对单台接收机/移动站所采集的相位和伪距观测值进行定位解算,能为世界上任何位置的用户提供可靠的,分米级甚至厘米级定位精度。
修正通过地球同步通信卫星作为差分通信链路,所以用户不用搭建本地参考站或数据后处理,可以在地球表面从北纬75°到南纬75°都可获得厘米到分米级精度。
2.2.2、位置差分原理
这是一种最简单的差分方法,任何一种GPS接收机均可改装和组成这种差分系统。
安装在基准站上的GPS接收机观测4颗卫星后便可进行三维定位,解算出基准站的坐标。由于存在着轨道误差、时钟误差、SA影响、大气影响、多径效应以及其他误差,解算出的坐标与基准站的已知坐标是不一样的, 存在误差。基准站利用数据链将此改正数发送出去,由用户站接收,并且对其解算的用户站坐标进行改正。
最后得到的改正后的用户坐标已消去了基准站和用户站的共同误差,例如卫星轨道误差、 SA影响、大气影响等,提高了定位精度。以上先决条件是基准站和用户站观测同一组卫星的情况。 位置差分法适用于用户与基准站间距离在100km以内的情况。
2.2.3、伪距差分原理(DGPS)
伪距差分是目前用途最广的一种技术。几乎所有的商用差分GPS接收机均采用这种技术。国际海事无线电委员会推荐的RTCM SC-104也采用了这种技术。
在基准站上的接收机需要计算得到它至可见卫星的距离,并将此计算出的距离与含有误差的测量值加以比较。利用一个α-β滤波器将此差值滤波并求出其偏差。然后将所有卫星的测距误差传输给用户(用户站),用户利用此测距误差来改正测量的伪距。最后,用户利用改正后的伪距来解出本身的位置, 就可消去公共误差,提高定位精度。
与位置差分相似,伪距差分能将两站公共误差抵消,但随着用户到基准站距离的增加又出现了系统误差,这种误差用任何差分法都是不能消除的。用户和基准站之间的距离对精度有决定性影响。利用伪距差分方法,定位精度可达到亚米级。
2.2.4、载波相位差分原理(RTK)
载波相位差分技术又称之为RTK技术(real time kinematic),是建立在及时处理两个测站的载波相位基础上的。载波相位差分技术能实时提供观测点的三维坐标,并达到厘米级的高精度。
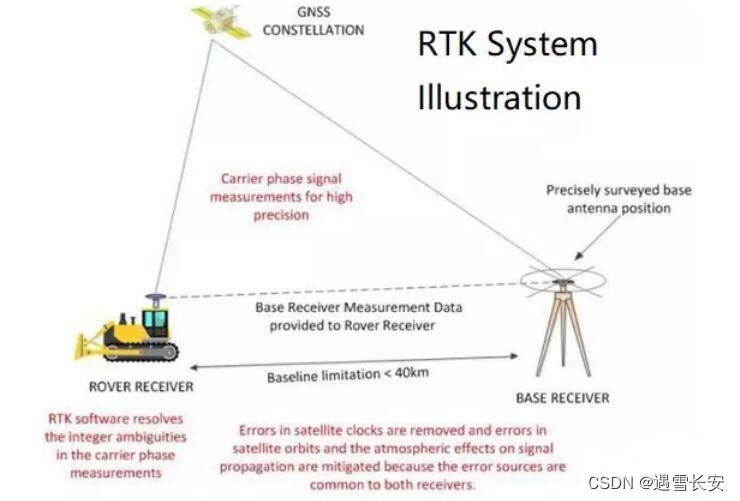
RTK 则是以载波相位观测量为根据的实时差分GPS测量,它是GPS测量技术发展中的一个新突破。它的工作思路与DGPS相似,由基准站通过数据链及时将其载波观测值及基准站坐标信息一同传送给用户站。用户站接收GPS卫星的载波相位与来自基准站的载波相位,并组成相位差分观测值进行及时处理,从而得到精度比DGPS高得多的实时测量结果。这种方法的精度一般为2cm左右。相对于常规测量技术,GPS技术具有测量精度高、测站间无需通视、观测时间短、仪间目标的三维坐标可以以文本的形式存储,也可根据数据库和土地信息系统软件的要求,使用一些很简单的程序,方便快捷地将其转换成有拓扑关系的图形。
它是测量技术发展里程中的一个突破,它由基准站接收机、数据链、 流动站接收机三部分组成。 在基准站上安置1台接收机为参考站, 对卫星进行连续观测,并将其观测数据和测站信息,通过无线电传输设备,实时地发送给流动站,流动站GPS接收机在接收GPS卫星信号的同时,通过无线接收设备,接收基准站传输的数据,然后根据相对定位的原理,实时解算出流动站的三维坐标及其精度(即基准站和流动站坐标差△X、△Y、△H,加上基准坐标得到的每个点的WGS-84坐标,通过坐标转换参数得出流动站每个点的平面坐标X、Y和海拔高H)。分电台模式和网络通讯模式。
实现载波相位差分GPS的方法分为两类:
- 修正法:和伪距差分相同,基准站把载波相位修正量发送给用户站,以改正其载波相位,之后求解坐标。是准RTK技术
- 差分法:把基准站采集的载波相位发送给 用户台进行求差解算坐标。为真正的RTK技术。
2.3、应用场景
细分领域 产品类型 精度 规格 价格 功耗 智能驾驶 模组 厘米级 车规级 几百元 >100mA 轻出行(共享两轮) 模组 亚米级 工业级 几十元 30mA 穿戴设备 模组 亚米级 消费级 几十元 10mA 无 人 机 模组 厘米级 工业级 几百元 30mA 无 人 机 板卡 厘米级 工业级 千元 2W-3W 智 慧 城 市 模组 米级/亚米级 工业级 几百元 30mA 智 慧 城 市 板卡 毫米级 工业级 千元 2W-3W 三、坐标转换
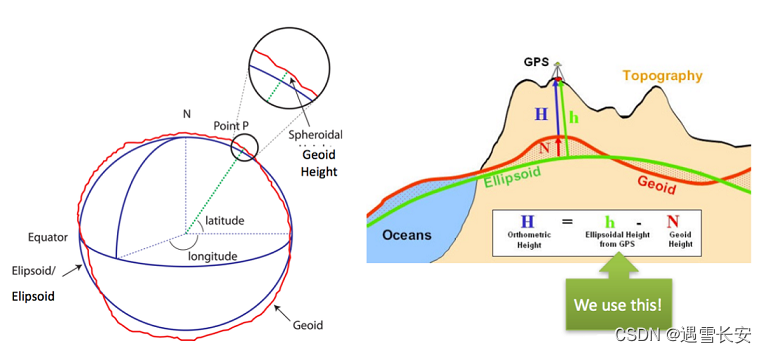
3.1、WGS84简介
WGS-84坐标系(World Geodetic System一1984 Coordinate System)是一种国际上采用的地心坐标系。坐标原点为地球质心,其地心空间直角坐标系的Z轴指向BIH (国际时间服务机构)1984.0定义的协议地球极(CTP)方向,X轴指向BIH 1984.0的零子午面和CTP赤道的交点,Y轴与Z轴、X轴垂直构成右手坐标系,称为1984年世界大地坐标系统。
3.2、国内坐标
GPS直接反映的是WGS-84坐标,而我们平时用的则是北京54坐标系或西安80坐标系,所以要通过坐标转换把GPS的观测成果变成我们需要的坐标。这个工作有多种模型可以实现。比较常用的转化方法是将平面与高程分开转换,平面坐标转换采用先将GPS测得成果投影成平面坐标,再用已知控制点计算二维相似变换的四参数。高程则采用平面拟合或二次曲面拟合模型,利用已知水准点计算出该测区的待测点的高程异常,从而求出它们的高程。
我们的软件输出的是WGS-84坐标系,所以也是需要经过上面第三点说的坐标转化才能转化为国内的坐标系。而坐标转换也会带来误差,该项误差主要取决于已知点的精度和已知点的分布情况。从以上两点可以看出,RTK的测量精度包括两个部分,其一是GPS的测量误差,其二是坐标转换带来的误差。
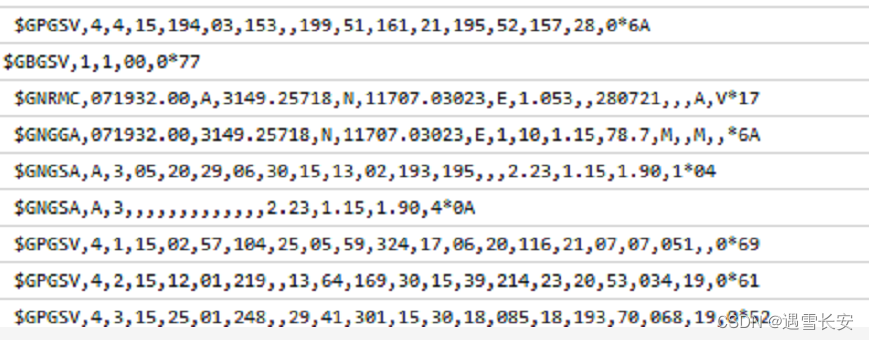
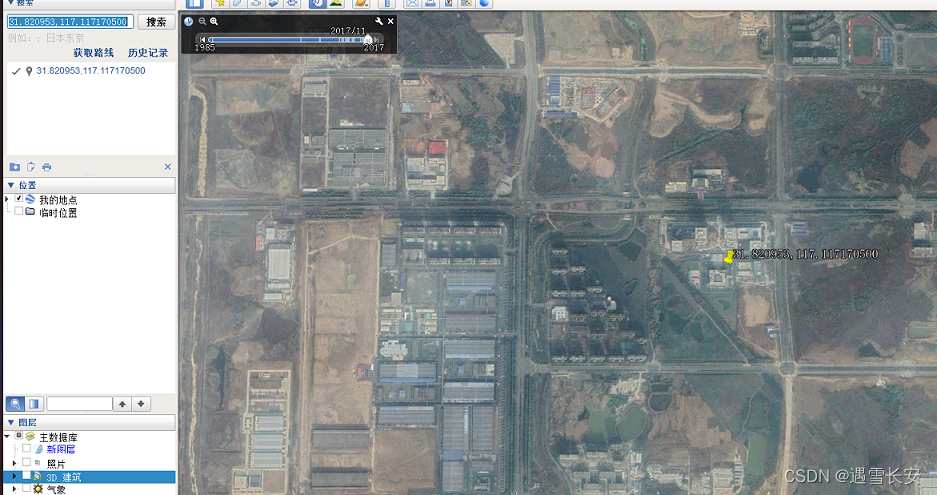
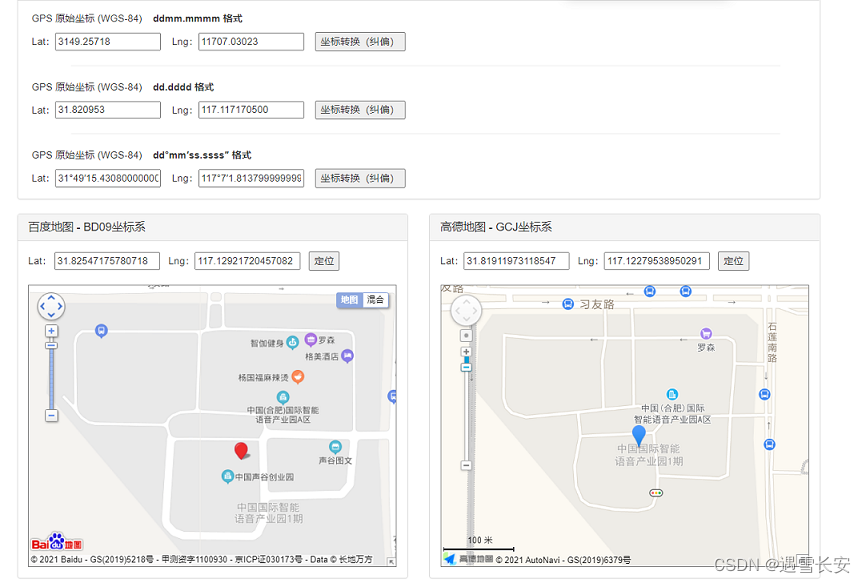
比如说我之前测试时,打印出来的定位结果,经纬度输出的格式是ddmm.mmmm:3149.25718,11707.03023,首先将其转化为dd.dddd:31.820953,117.117170500。
WGS-84坐标在谷歌地图上定位数据还是比较准的。
而在百度地图误差就比较大了。
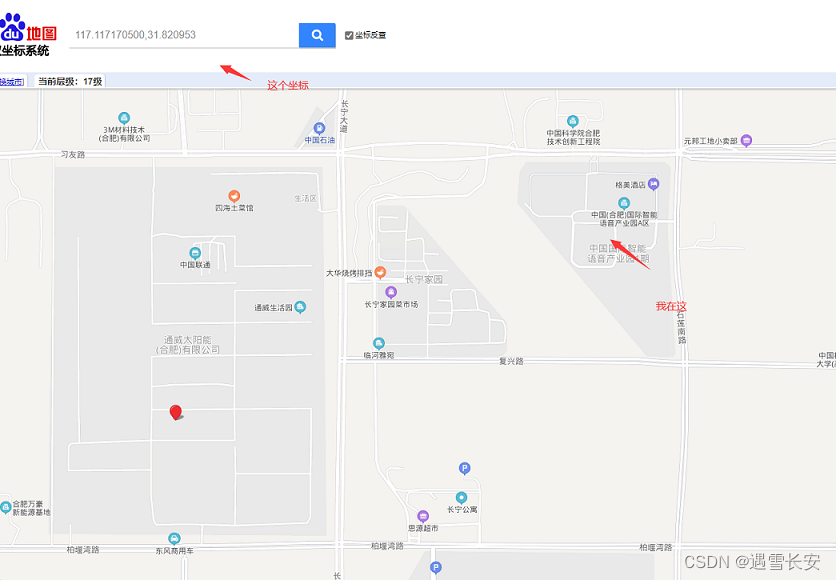
这时候就需要使用纠偏算法去进行纠偏,我们自己就有一个网站用于GPS纠偏,点此访问。输入上面的经纬度,在下方就可以看到在百度地图以及高德地图中的纠偏结果。
四、其他
如何判断定位状态
$GPGGA 语句包括17个字段:语句标识头,世界时间,纬度,纬度半球,经度,经度半球,定位质量指示,使用卫星数量,HDOP-水平精度因子,椭球高,高度单位,大地水准面高度异常差值,高度单位,差分GPS数据期限,差分参考基站标号,校验和结束标记(用回车符和换行符),分别用14个逗号进行分隔。
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*xxxxx <6> GPS状态, 0初始化, 1单点定位, 2伪距解, 3无效PPS, 4固定解, 5浮点解, 6正在估算 7,人工输入固定值, 8模拟模式, 9WAAS差分 xxx - 1
- 2
- 3
- 4
- 5
- 6
- 7
其中第六字段中的状态是我们判断是否进入差分的一个依据。
- 1代表单点定位。这里的单点定位不等同于2.2.1小节中的描述高精度单点定位,精度是米级。
- 2代表伪距解定位。DGPS,2.2.3小结有说到,在接收到卫星信号质量较差的时候,可以出来伪距解,精度是亚米级。
- 4代表固定解,属于高精度RTK定位,精度是厘米级
- 5代表浮点解,属于中精度RTK定位,精度是分米级
上面所说的精度是只静态测试时一系列点的标准方差,RTK用户站在运动时得到的定位误差会略大,视情况而定。
-
相关阅读:
mybatis-plus使用小結
Python【多分支练习】
通过IDEA打jar包
LeetCode - 解题笔记 - 211 - Design Add and Search Words Data Structure
算法练习5——多数元素
Zabbix 5.0 监控教程(四)
【Java面试小短文】Spring Bean生命周期的执行流程
22道js输出顺序问题,你能做出几道
CodeForces刷题:Football、Letter、Indian Summer、Codecraft III、Triangular numbers
竞赛选题 深度学习乳腺癌分类
- 原文地址:https://blog.csdn.net/weixin_44570083/article/details/126361840