-
【数据结构复习】第六章图
(一)图的逻辑结构
1.图的定义
(1)图中常将数据元素称为顶点。
(2)图由顶点的有穷非空集合和顶点之间的边的集合组成,记为:G = (V,E)。(3)G表示一个图,V是顶点集合,E是顶点之间边的集合。
例:

顶点集合V = {v0,v1,v2,v3,v4},边的集合{(v0,v1),(v0,v3),(v1,v2),(v1,v4),(v2,v3),(v2,v4)}(4)有向、无向
顶点vi,vj之间的边没有方向叫无向边,用无序偶对(vi,vj)表示。
顶点vi,vj之间有方向叫边为有向边(也称为),用有序偶对表示。

顶点之间都是无向边,则该图称为无向图。

顶点之间都是有向边,则该图称为有向图。(5)权、带权图(网图)
对边赋予有意义的数值量,可以由具体含义。
边上带权的图称为带权图或网图。

无向网图

有向网图
2.图的基本术语
(1)邻接
无向图中,两顶点间存在边(vi,vj),则vi,vj互为邻接点,同时称边依附于顶点vi,vj。
有向图中,两顶点vi,vj,若存在弧,则称顶点vi邻接到顶点vj,顶点vj邻接自顶点vi,同时称弧 依附于顶点vi和顶点vj。

V1的邻接点: V2 、V3
V3的邻接点: V4(2)顶点的度、入度、出度
无向图中顶点v的度是依附于该顶点的边数。记为:TD(v)

有向图中,顶点v的入度是指以该顶点为弧头的弧的数目,记为:ID (v)
有向图中,顶点v的出度是指以该顶点为弧尾的弧的数目,记为:OD (v)

(3)无向完全图、有向完全图

无向图中,如果任意两个顶点之间都存在边,则称该图为无向完全图。
含有n个顶点的无向完全图有n×(n-1)/2条边

有向图中,如果任意两个顶点之间都存在方向相反的两条弧,则称该图为有向完全图。
含有n个顶点的有向完全图有n×(n-1)条边。(4)稠密图、稀疏图
变数少——稀疏图,边数多——稠密图。(5)路径、路径长度、回路
在无向图G=(V, E)中,从顶点vp到顶点vq之间的路径是一个顶点序列(vp=vi0,vi1,vi2, …, vim=vq)路径上边的数目叫路径长度。
例:
V1 到V4的路径:
V1 V4(长度:8)
V1 V2 V3 V4(长度:7)
V1 V2 V5V3 V4(长度:15)
第一个顶点和最后一个顶点相同的路径叫回路。(6)简单路径、简单回路
顶点不重复出现的路径叫简单路径。
除第一个顶点和最后一个顶点之外,不重复出现的回路叫简单回路。(7)子图
若图G=(V,E),G’=(V’,E’),如果V’⊆V且E’ ⊆ E ,则称图G’是G的子图。

一个图可以有多个子图。(8)连通图、连通分量
从一个顶点vi到另一个顶点vj(i≠j)有路径,则称顶点vi和vj是连通的,任意两个顶点都是连通的,则称该图是连通图。
连通分量:非连通图的极大连通子图称为连通分量。例:求连通分量

此图有两个连通分量


(9)强连通图、强连通分量
有向图中,对图中任意一对顶点vi和vj(i≠j),若从顶点vi到顶点vj和从顶点vj到顶点vi均有路径,则称该有向图是强连通图。强连通分量:非强连通图的极大强连通子图。
例:求强连通分量

此图有两个强连通分量


(二)图的遍历操作
图的遍历操作是从图中某顶点出发,对图中所有顶点访问一次且仅访问一次。
需要解决的问题:
a。如何选取起始顶点。将顶点进行编号,从编号小的顶点开始,编号不唯一,采用一维数组存储顶点信息
b。从某顶点出发可能到达不了所有顶点,如非连通分量。
多次重复从某一顶点出发进行图的遍历(一个个遍历)。
c。图中可能存在回路,某些顶点可能被重复访问,如何避免因回路陷入死循环。
设置访问标志数组visited[n](n为顶点个数)区分顶点是否访问,初值为0表示未访问,若某顶点i已被访问,访问标志visited[i]的值置为1。
d。一个顶点可与多个顶点相邻接,如何选取下一个要访问的顶点。
有深度优先遍历和广度优先遍历对有向、无向图都适用。
1.深度优先遍历(类似于树的前序遍历)
基本思想:
输入:顶点编号v
(1)访问顶点v,修改标志visited[v] = 1
(2)从v的未被访问的邻接点中选取一个顶点w,从w出发进行深度优先遍历。(w = 顶点v的第一个邻接点)
(3)重复上两步,直到图中所有和v有路相通的顶点都被访问到。
while(w存在)
a。if(w未被访问)从顶点w出发递归执行该算法
b。w = 顶点v的下一个邻接点例一:


例二:


2.深度优先遍历的入栈出栈序列

(1)深一层递归V1、V2、V4、V5入栈



(2)递归返回5出栈8入栈



(3)递归返回8出栈,递归返回到V1



(4)V2、V4出栈,深一层递归V3、V6、V7入栈



(5)最后递归返回,V1、V3、V6、V7依次出栈。
3.广度优先遍历(类似于树的层序遍历)
基本思想:
(1) 访问顶点v;
(2) 依次访问v的各个未被访问的邻接点v1, v2, …, vk;
(3) 分别从v1,v2,…,vk出发依次访问和v有路径相通且路径长度为1、2的顶点,为了使"先被访问顶点的邻接点”先于“后被访问顶点的邻接点"被访问,设置队列存储已被访问的顶点。例一:


例二:


4.广度优先遍历的入队出队序列
(1)广度优先遍历,V1入队



(2)V1出队,V2、V3入队



(3)V2继续向下遍历,V2出队,V4、V5入队



(4)V3继续向下遍历,V3出队,V6、V7入队



(5)V4继续向下遍历,V4出队,V8入队



(6)所有顶点都遍历到了,剩下的V5、V6、V7、V8出队。
(三)图的存储结构及实现
两种存储结构——邻接矩阵、邻接表。
1.邻接矩阵存储结构
图的邻接矩阵存储(数组表示法),用一维数组存储图的顶点。
二维数组存储图的边(各顶点之间邻接关系),存储邻接关系的二维数组叫邻接矩阵。设图G=(V,E)有n个顶点,则邻接矩阵是一个n×n的方阵,定义为:

无向图的邻接矩阵一定是对称矩阵,有向图不一定是对称矩阵。
(1)无向图的邻接矩阵


a。如何求顶点i的度:邻接矩阵第i行或i列的非0元素的个数。b。如何判断顶点 i 和 j 之间是否存在边:测试邻接矩阵中相应位置的元素arc[i][j]是否为1,是1则表示i、j之间存在边。
c。如何求顶点 i 的所有邻接点:将数组中第 i 行元素扫描一遍,若arc[i][j]为1的,则顶点 j 为顶点 i 的邻接点。
(2)有向图的邻接矩阵


a。如何求顶点 i 的出度:
邻接矩阵的第 i 行元素之和。b。如何求顶点 i 的入度:
邻接矩阵的第 i 列元素之和。c。如何判断从顶点 i 到顶点 j 是否存在边:
测试邻接矩阵中相应位置的元素arc[i][j]是否为1。
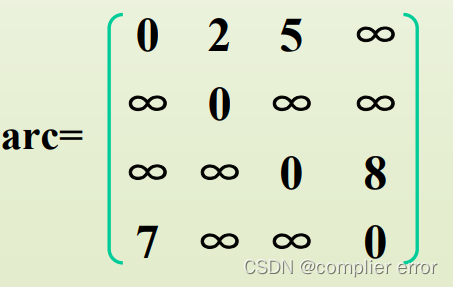
设G是网图,则邻接矩阵可定义为:

其中Wij表示边(vi,vj)或弧上的权值,无穷表示计算机允许的大于所有边上的权值的数。

2.邻接矩阵的实现
(1)邻接矩阵存储类定义
const int MaxSize = 10; //图中最多顶点个数 template <typename DataType> class MGraph { public: MGraph(DataType a[ ], int n, int e); ~MGraph( ) void DFTraverse(int v); //深度优先遍历图 void BFTraverse(int v); //广度优先遍历图 private: DataType vertex[MaxSize]; //存放图中顶点的数组 int arc[MaxSize][MaxSize]; //存放图中边的数组 int vertexNum,edgeNum; //图中的顶点数和边数 };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
(2)构造函数
template <typename DataType> MGraph::MGraph(DataType a[ ], int n, int e) { int i,j,k; vertexNum = n; edgeNum = e; for (i = 0; i < vertexNum; i++) //存储顶点 vertex[i] = a[i]; for (i = 0; i < vertexNum; i++) //初始化邻接矩阵 for (j = 0; j < vertexNum; j++) edge[i][j] = 0; for (k = 0; k < edgeNum; k++) { //依次输入每一条边 cin >> i >> j; //边依附的两个顶点的序号 edge[i][j] = 1; edge[j][i] = 1; //置有边标志 } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
(3)析构函数
析构函数为空,无需销毁(4)深度优先遍历
template <typename DataType> void MGraph<DataType>::DFTraverse(int v) { cout << vertex[v]; visited [v] = 1; //找顶点v的邻接点,v所在行等于1的列 for (j = 0; j < vertexNum; j++) if (arc[v][j] == 1 && visited[j] == 0) //visited = 0未被访问的点 DFTraverse( j ); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
(5)广度优先遍历
template <typename DataType> void MGraph<DataType>::BFTraverse(int v) { int w,j,Q[MaxSize]; front = rear = -1; //初始化队列,假设采用顺序队列且不会发生溢出 cout << vertex[v]; visited[v] = 1; Q[++rear] = v; //被访问顶点入队 while (front != rear) //队列非空 { w = Q[++front]; //将队头元素出队 for (j = 0; j < vertexNum; j++) if (arc[v][j] == 1 && visited[j] == 0 ) { cout << vertex[j]; visited[j] = 1; Q[++rear] = j; } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
3.邻接表
顺序存储与连接存储结合,类似树的孩子表示法。1.邻接表的存储结构
对于图的每个顶点vi,将所有邻接于vi的顶点链成一个单链表,称为顶点vi的边表(对于有向图则称为出边表)。
所有边表的头指针和存储顶点信息的一维数组构成了顶点表。(1)结点结构:

vertex:数据域,存放顶点信息。
firstedge:指针域,指向边表中第一个结点。
adjvex:邻接点域,边的终点在顶点表中的下标。
next:指针域,指向边表中的下一个结点
注:对于网图,边表还需增设info域存储边上信息(如权值)。顶点表结点和边表结点的结构体定义:
struct EdgeNode //定义边表结点 { int adjvex; //邻接域 EdgeNode *next; }; template <typename DataType> struct VertexNode //定义顶点表结点 { DataType vertex; EdgeNode *firstEdge; };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
(2)无向图的邻接表存储示意图:


a。边表中的结点表示什么?
每个结点对应图中的一条边。b。如何求顶点 i 的度?
顶点i的边表中结点的个数。c。如何判断顶点 i 和顶点 j之间是否存在边?
测试顶点 i 的边表中是否存在终点为 j 的结点。(3)有向图的邻接表


a。如何求顶点 i 的出度?
顶点 i 的出边表中结点的个数。b。如何求顶点 i 的入度?
各顶点的出边表中以顶点 i 为终点的结点个数。c。如何求顶点 i 的所有邻接点?
遍历顶点 i 的边表,该边表中的所有终点都是顶点 i 的邻接点。(4)网图的邻接表


4.邻接表的实现
(1)邻接表类定义
const int MaxSize = 10; //图的最大顶点数 template <typename DataType> class ALGraph { public: ALGraph(DataType a[ ], int n, int e); ~ALGraph; void DFTraverse(int v); void BFTraverse(int v); private: VertexNode adjlist[MaxSize]; int vertexNum, edgeNum; };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
(2)构造函数
template <typename DataType> ALGraph<DataType>::ALGraph(DataType a[ ], int n, int e) { int i,j,k; EdgeNode *s = nullptr; vertexNum = n; edgeNum = e; //n个顶点,e个边 for (i = 0; i < vertexNum; i++) //输入顶点信息,初始化边表 { adjlist[i].vertex = a[i]; adjlist[i].firstedge = NULL; } for (k = 0; k < edgeNum; k++) //输入边的信息存储在边表中 { cin >> i >> j; //输入边所依附的两个顶点编号 s = new EdgeNode; s->adjvex = j; //生成边表结点s s->next = adjlist[i].firstedge; //将结点s插入表头 adjlist[i].firstedge = s; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
(3)析构函数
template <typename DataType> ALGraph<DataType>::~ALGraph() { EdgeNode *p = nullptr,*q = nullptr; for (int i = 0;i < vertexNum;i++) { p = q = adjlist[i].firstEdge; while (p!=nullptr) { p = p->next; delete q;q = p; } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
(4)深度优先遍历
template <typename DataType> void ALGraph<DataType>::DFTraverse(int v) { int j; EdgeNode *p = nullptr; cout << adjlist[v].vertex; visited[v] = 1; p = adjlist[v].firstedge; //工作指针p指向顶点v的边表 while (p != NULL) //依次搜索顶点v的邻接点j { j = p->adjvex; if (visited[j] == 0) DFTraverse(j); p = p->next; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
(5)广度优先遍历
template <typename DataType> void ALGraph<DataType>::BFTraverse(int v) { int w,j,Q[MaxSize]; front = rear = -1; EdgeNode *p = nullptr; cout << adjlist[v].vertex; visited[v] = 1; Q[++rear] = v; //被访问顶点入队 while(front != rear) //当队列非空时 { v = Q[++front]; p = adjlist[v].firstedge; //工作指针p指向顶点v的边表 while(p != NULL) { j = p->adjvex; if(visited[j] == 0) { cout << adjlist[j].vertex; visited[j] = 1; Q[++rear] = j; } p = p->next; } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
5.邻接矩阵和邻接表的比较
(1)空间性能
邻接矩阵是nxn的矩阵,空间代价是O(n^2)。
邻接表,邻接表空间代价与图的边数和顶点有关空间代价为O(n+e)。
邻接矩阵存储所有可能的边,图越稠密,邻接矩阵空间效率越高。
稀疏矩阵采用邻接表。(2)时间性能比较
使用邻接表,只需检查此顶点的边表,平均查找时间O(e/n)。
使用邻接矩阵,需检查所有可能的边,需要查找O(n)次。
(四)最小生成树
1.相关概念
(1)连通图的生成树:是包含图中全部顶点的极小连通子图。
(2)生成树的特点:
♣ 生成树的顶点个数与图的顶点个数相同。
♣ 生成树是图的极小连通子图。
♣ 一个有n个顶点的连通图的生成树有n-1条边。
♣ 生成树中任意两个顶点间的路径是唯一的。
♣ 在生成树中再加一条边必然形成回路。(3)生成树的代价:设G=(V,E)是一个无向连通网,生成树上各边的权值之和称为该生成树的代价。
(4)最小生成树:所有生成树中代价最小的称为最小生成树。
例:图中为连通图G,和生成树1、生成树2。



2.Prim算法
基本思想:
设G=(V, E)是具有n个顶点的连通网,T=(U, TE)是G的最小生成树, T的初始状态为U={u(u0∈V),TE={ },重复执行下述操作:
在所有u∈U,v∈V-U的边中找一条代价最小的边(u, v)并入集合TE,同时v并入U,直至U=V。例: Prim算法构造最小生成树过程。
(1)cost中有从顶点A开始到所有顶点的路径,A进入U,三条路径可走,选择cost最少的(A,F)19。

(2)F进入U,到剩下未到达的顶点有AB和F的三条路径可走,选择cost最少的FC

(3)C进入U,到剩下未到达的顶点有CD、AB、FE三条路径,选择cost最少的(CD)17

(4)D进入U,选择cost较小的(F,E)

(5)进入U选择剩下的BE

(6)所有顶点进入,最小生成树构造完成

prim算法的存储结构
a。图的存储结构:由于算法执行过程需要不断的读取任意两顶点之间的权值,所以采用邻接存储。b。候选最短边集:设数组adjvex[n]和lowcost[n] 分别表示 最短边的邻接点和权值。

初始时,U = {v},lowcost[v] = 0表示顶点v加入集合U。数组元素adjvex[i] = v,lowcost[j] = 边(v,i)的权值(1<=i<=n-1)。
在数组lowcost[n]中选取最小的权值lowcost[j],顶点j从集合V-U进入集合U后,最短边集变化,根据下式adjvex[n]和lowcost[n]更新,将lowcost置为0,表示将顶点j加入集合U中。
locost[i] = min{lowcost[i],边(i,j)的权值}
adjvex[i] = j(如果边(i,j)的权值
下表为无向联通网图构造最小生成树数组adjvex和lowcost及集合U的变化



void Prim(int v) //从顶点v出发 { int i,j,k; int adjvex[MaxSize],lowcost[MaxSize]; for (i = 0;i < vertexNum;i++) //初始化辅助数组 { lowcost[i] = edge[v][j]; adjvex[i] = v; } lowcost[v] = 0; //将顶点v加入集合U for (k = 1;k <vertexNum;k++) //迭代n-1次 { j = MinEdge(lowcost,vertexNum); //寻找最短边 cout<<j<<adjvex[j]<<lowcost[j]<<endl; lowcost[j] = 0; //顶点j加入集合U for (i = 0;i < vertexNum;i++) //调整辅助数组 if (edge[i][j]<lowcost[i]) { lowcost[i] = edge[i][j]; adjvex[i] = j; } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
3.Kruskal算法
Kruskal算法的关键是:判断被考察边的两个顶点是否位于两个连通分量。
基本思想:
设无向连通网为G=(V, E),令G的最小生成树为T=(U, TE),其初态为U=V,TE={ },图G中每个顶点自成一个连通分量。
图G中每个顶点自成一个连通分量。按照边的权值由小到大的顺序,在G的边集E中选择代价最小的边。•若该边依附的顶点属于T中不同的连通分量上,则将此边作为最小生成树的边加入到T中,
•否则舍去此边而选择下一条代价最小的边。
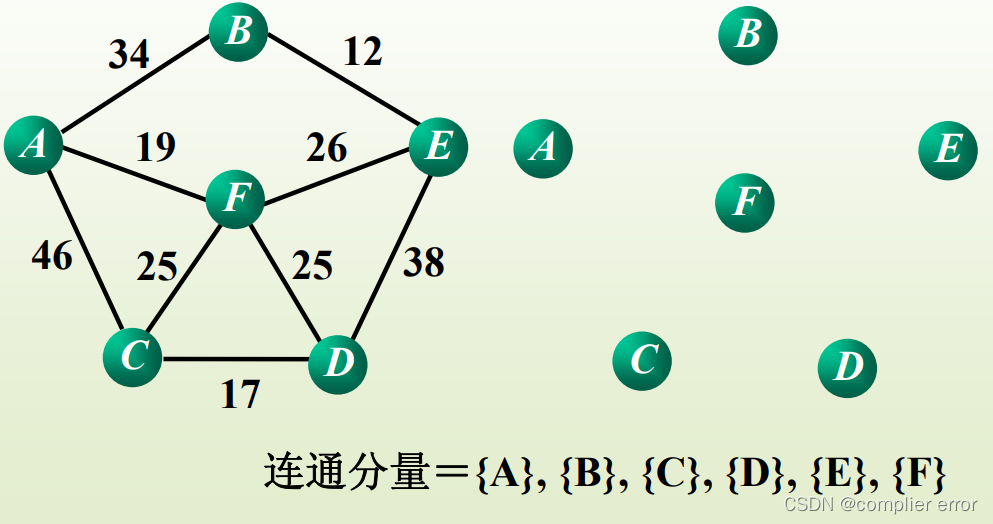
•依此类推,直至所有顶点都在同一连通分量上。此连通分量便为G的一棵最小生成树。例: Kruskal算法构造最小生成树过程。
(1)构造开始,每个顶点是一个连通分量。
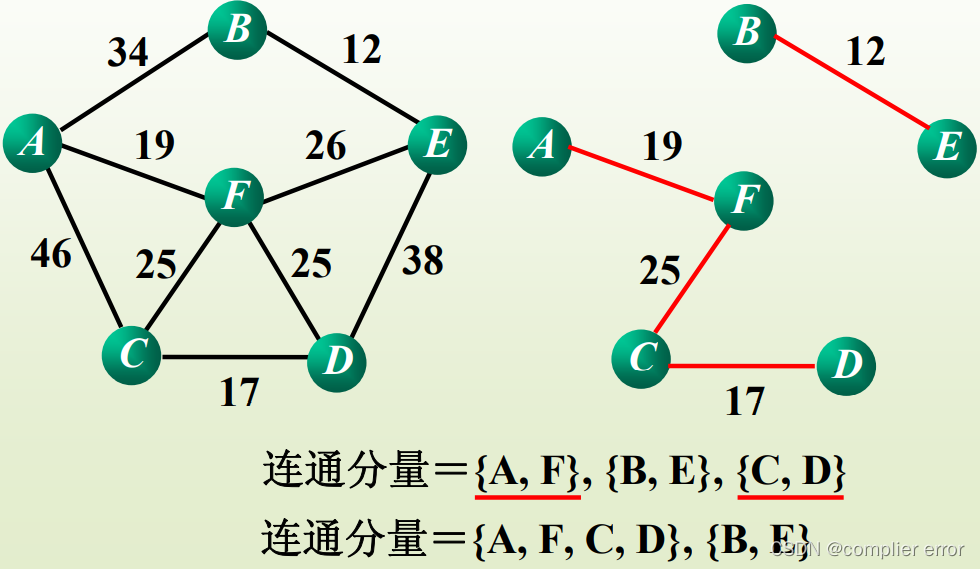
(2)选择权值最小的边BE,BE放一块。

(3)继续选择最小权值的边,AF,将AF放一块。

(4)继续选择最小的,CD放一块。

(5)AF、CD之间选择权值最小的边AFCD放一块。
(6)AFCD和BE之间选择权值最小的边,AFCD和BE放一块。此时所有顶点位于一个连通分量,结束Kruskal算法。

Kruskal算法的存储结构
a。采用边集数组存储,为了提高查找最短边的速度,将边集数组的边按权值排序。
边集数组的结构体定义struct EdgeType //定义边集数组的元素类型 { int from,to,weight; //假设权值为整数 }- 1
- 2
- 3
- 4
b。连通分量所在集合涉及集合的查找合并等操作,采用并查集实现。
即将集合中的元素组织成树的形式,合并两个集合即将一个集合的根结点作为另一个的孩子。下图为并查集合并过程


图的边集数组存储
const int MaxVertex = 10; //图中最多点数 const int MaxEdge = 100; //图中最多边数 template<typename DataType> class EdgeGraph { public: EdgeGraph(DataType a[],int n,int e) ~EdgeGraph(); void Kruskal(); //Kruskal算法生成最小生成树 private: int FindRoot(int parent[],int v); //求顶点v所在的集合的根 DataType vertex(MaxVertex); //存储顶点的一维数组 EdgeType edge[MaxEdge]; //存储边的边集数组 int vertexNum,edgeNum; };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
Kruskal算法成员函数定义
void Kruskal() { int num = 0,i,vex1,vex2; int parent[vertexNum]; //双亲表示法存储并查表 for (i = 0;i < vertexNum;i++) parent[i] = -1; //初始化n个连通分量 for (num = 0,i = 0;num < vertexNum-1;i++) //依次考察最短的边 { vex1 = FindRoot(parent,edge[i].from); vex2 = FindRoot(parent,edge[i].to); if (vex1 !=vex2){ //位于不同的集合 cout<<"("<<edge[i].from<<","edge[i].to<<")"<<edge[i].weight; parent[vex2] = vex1; //合并集合 num++; } } } int FindRoot(int parent[],int v) //求顶点v所在集合的根 { int t = v; while (parent[t]>-1) //求顶点t的双亲一直到根结点 t = parent[t]; return t; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
两种算法的比较:
Prim算法:时间复杂度为O(n^2),适用范围:稠密图。
Kruskal算法:时间复杂度为O(eloge),适用范围:稀疏图。
(五)最短路径
a。非网图中,最短路径指两顶点之间边数最少的路径。

b。在网图中值两顶点之间权值最小的路径。

c。路径上第一个顶点称为源点,最后一个顶点称为终点。
1.Dijkstra算法(最短路径问题,重点是画表)
Dijkstra用于求单源点的最短路径问题,输出的是选取的开始顶点v到其他顶点的最短路径。
问题描述: 给定带权有向图G=(V, E)和源点v∈V,求从v到G中其余各顶点的最短路径。
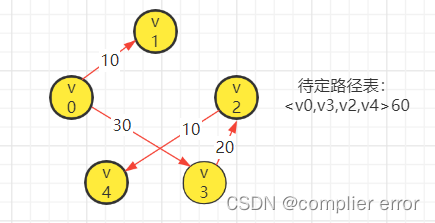
Dijkstra算法按路径长度递增的次序产生最短路径,黄色顶点表示生长点,红边表示已求得最短路径。

(1)初始待定路径表,得到生长点v1。

(2)更新待定路径表,得到生长点v3。

(3)更新待定路径表,得到生长点v2。

(4)更新待定路径表得到生长点v4结束Dijkstra算法
Dijkstra算法执行过程中各参量变化过程

存储结构:
a。需要快速取得边上的权值,所以选择邻接矩阵存储。b。辅助数组dist[n],元素dist[i]表示当前找到的从源点v到vi的最短路径。
若v到vi之间有弧则dist[i]为弧上的权值,若v到vi无弧则dist[i]为∞。
若求得终点为vk,则根据下式进行迭代:
dist[i] = min{ dist[i],dist[k]+edge[k][i] } (0<=i<=n-1)c。辅助数组path[n],path[i]是一个字符串,表示从源点到终点vi的路径。
若v到vi之间有弧则path[i]为" vvi ",否则置path[i]为空串。d。集合S,若顶点vk的最短路径已求出则dist[k]置为0,即数组dist[n]中值为0对应的是顶点下。
函数定义
void Dijkstra(int v) //从源点出发 { int i,k,num,dist[MaxSize]; string path[MaxSize]; for (i = 0;i < vertexNum;i++) //初始化数组dist和path { dist[i] = edge[v][i]; if (dist[i] != 100) //假设100为边上权的最大值 path[i] = vertex[v] + vertex[i]; //+为字符串的连接字符 else path[i] = ""; } for (num = 1;num < vertexNum;num++) { k = Min(dist,vertexNum); //在dist数组中找到最小下标并返回数组下标 cout <<path{[k]<<dist[k]; for (i = 0;i < vertexNum;i++) //修改数组dist和path if (dist[i]>dist[k] + edge[k][i]){ dist[i] = dist[k] + edge[k][i]; path[i] = path[k] + vertex[i]; } dist[k] = 0; //将顶点k加入到集合S中 } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
2.Floyd算法(最短路径问题)
给定带权有向图G = (V,E),对任意顶点vi和vj(i!=j)求顶点vi到vj的最短路径。
基本思想:
若vi 到vj 有弧(若不存在vi到vj的弧,则权值为∞),则从vi 到vj 存在一条长度为arcs[i][j]的路径,该路径不一定是最短路径,尚需进行n次试探:如图:
在路径上增加一个顶点v0 ,考虑路径(vi , v0, vj )是否存在(即判别弧(vi , v0 )和(v0 , vj )是否存在)。a。首先比较vivj和viv0vj的路径长度,取长度较短者作为vi到vj之间编号不大于0的最短路径(谁短谁是0)
b。再次比较,在路径上再增加一个顶点v1和已经得到的编号不大于0的最短路径进行比较,取长度短的作为中间顶点编号不大于1的最短路径(与0比谁短谁是1)
c。以此类推,vi……vk和vk……vj分别是从vi到vk和vk到vj中间顶点编号不大于k-1的最短路径,将
vi……vk……vj与顶点编号不大于k-1的进行比较,短的是顶点编号不大于k的最短路径。n次比较后得到的是vi到vj的最短路径。


Floyd算法执行过程中,数组dist和path的变化。

void Floyd() { int i,j,k,dist[MaxSize][MaxSize]; string path[MaxSize][MaxSize]; for (i = 0; i < vertexNum; i++) //初始化矩阵dist和path for (j = 0; j < vertexNum; j++) { dist[i][j] = edge[i][j]; if (dist[i][j] != 100) //假设100为权的最大值 path[i][j] = vertex[i] + vertex[j]; else path[i][j] = ""; } for (k = 0; k < vertexNum; k++) //进行n次迭代 for (i = 0; i < vertexNum; i++) for (j = 0; j < vertexNum; j++) if (dist[i][k] + dist[k][j] < dist[i][j]) { dist[i][j] = dist[i][k] + dist[k][j]; path[i][j] = path[i][k] + path[k][j]; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
(六)有向无环图及其应用
1.AOV网与拓扑排序
在一个表示工程的有向图中:用顶点表示活动,用弧表示活动之间的优先关系,称这样的有向图为顶点表示活动的网,简称AOV网。(1)AOV网特点
a。AOV网之间的弧表示活动之间存在某种制约关系。
b。AOV网中不能出现回路。
因此判断AOV网代表的工程能否顺利进行,即判断它是否存在回路。(2)拓扑序列
设G=(V,E)是一个具有n个顶点的有向图,V中的顶点序列v1, v2, …, vn称为一个拓扑序列。
当且仅当满足下列条件:若从顶点vi到vj有一条路径,则在顶点序列中顶点vi必在顶点vj之前。拓扑排序:对一个有向图构造拓扑序列的过程称为拓扑排序。(3)AOV网及拓扑序列

(4)AOV网进行拓扑排序的基本思想:
a。AOV网中选择一个没有前驱的顶点并输出。b。从AOV网中删除该顶点,以及所有以该顶点为尾的弧。
c。重复以上两步,直到输出所有顶点。
AOV网中顶点全部被输出,说明AOV网中不存在回路。
AOV网中顶点未被全部输出,剩下顶点均不存在没有前驱结点的顶点,说明AOV网中存在回路。
2.拓扑排序的存储结构
(1)拓扑排序过程中,需要查找所有以某顶点为尾的弧,即需要找到该顶点的所有出边,因此图采用邻接表存储,另外在顶点表中加一个入度域,方便入度操作。
(2)AOV网及其邻接表

(3)查找没有前驱的顶点
为了避免每次查找时都遍历顶点表,设置一个栈,AOV网中入度为0的顶点都将其压栈。

void TopSort() { int i,j,k,count = 0; //累加器count初始化 int S[MaxSize],top = -1; //采用顺序栈并初始化 EdgeNode *p = nullptr; for (i = 0;i < vertexNum;i++)v //扫描顶点表 if (adjlist[i].in==0) S[++top] = i; //将入度为0的顶点压栈 while (top!=-1) //当栈中还有入度为0的顶点时 { j = S[top--]; //从栈中取出入度为0的顶点 cout<<adjlist[j].vertex; count++; p = adjlist[j].firstEdge; //工作指针p初始化 while (p!=nullptr) //扫描顶点表,找出顶点j的所有出边 { k = p->adjvex; adjlist[k].in--; if (adjlist[k].in==0) S[++top] = k; //将入度为0的顶点入栈 p = p->next; } } if (count < vertexNum) cout<<"有回路"; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
3.关键路径AOE网
(1)定义
把工程计划表示为有向图,用顶点表示事件,弧表示活动,边上的权值表示活动的持续时间。这样边表示活动的网,简称AOE网。AOE网中没有入边的顶点称为始点(或源点),没有出边的顶点称为终点(或汇点)。
关键活动:关键路径上的活动称为关键活动。
关键活动:关键路径上的活动称为关键活动。
(2)AOE网的性质
a。 只有在某顶点所代表的事件发生后,从该顶点出发的各活动才能开始;
b。只有在进入某顶点的各活动都结束,该顶点所代表的事件才能发生。(3)
例:


a。从始点到终点的路径可能不止一条,只有各条路径上所有活动都完成了,整个工程才算完成。
b。完成整个工程所需的最短时间取决于从始点到终点的最长路径长度,即这条路径上所有活动的持续时间之和。这条路径长度最长的路径就叫做关键路径。(4)找关键路径
要找关键路径首先要找出关键活动。首先计算以下与关键活动有关的量:
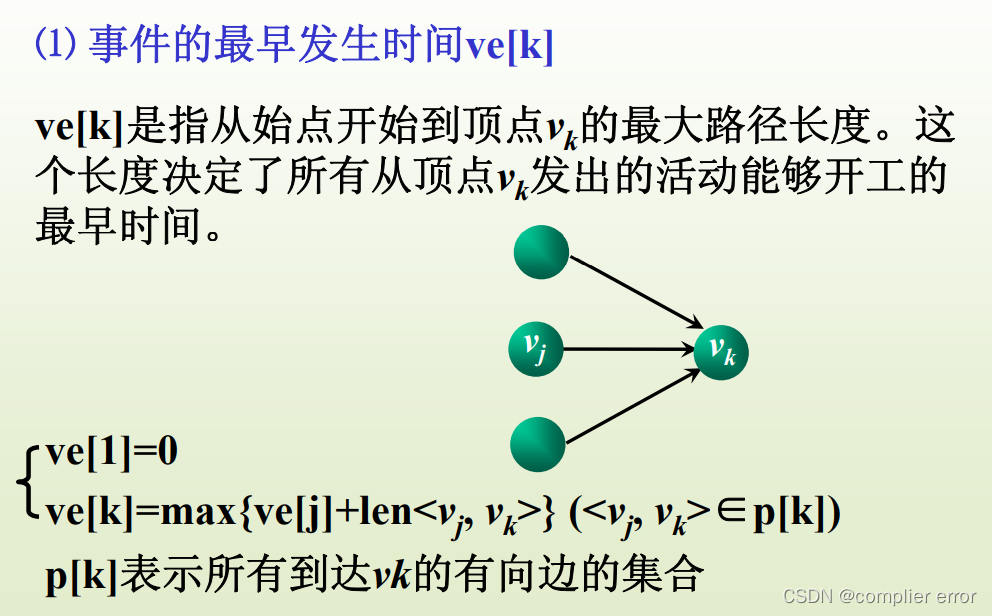
a。事件的最早发生时间ve[k]
b。事件的最迟发生时间vl[k]
c。活动的最早开始时间e[i]
d。活动的最晚开始时间l[i]最后计算各个活动的时间余量 l [k] - e [k] ,时间余量为0者即为关键活动。
(5)找出关键活动及关键路径需要定义如下数组







el [i] = ee [i]的活动就是关键活动。el [i] > ee[i]的活动不是关键活动,el [i] - ee[i]的值为活动的时间余量。关键活动确定后,关键活动所在路径就是关键路径。 -
相关阅读:
leetcode-判断是不是二叉搜索树-92
ubuntu未开启ssh
Windows MySQL8.0免安装版,配置多个安装示例
【图解 LeetCode 房屋染色 动态规划思想 + 代码实现】
Excel·VBA日期时间转换提取正则表达式函数
Kubernetes学习笔记-保障集群内节点和网络安全20220827
短视频解析接口分发系统
stable diffusion本地部署教程
数据中心网络架构的问题与演进 — NFV
技术实践|高斯集群服务器双缺省网关故障分析
- 原文地址:https://blog.csdn.net/qq_45748133/article/details/126165644
