-
【信号处理】基于蚁群优化随机共振检测附matlab代码
1 内容介绍
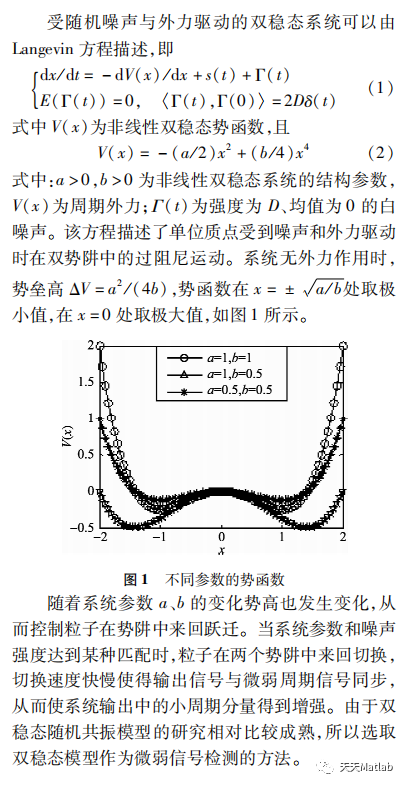
信号检测在机械故障诊断领域有着广泛应用。由于该领域的背景噪声很强,而待检信号非常微弱,检测出有效信号非常困难。传统的信号检测方法主要有相关检测、高阶谱分析、经验模态分解和卡尔曼滤波等。这些方法主要通过抑制和去除噪声来实现信号检测,当有用信号频率和噪声频率混叠时,去除噪声的同时对有用信号有一定损害,从而影响检测精度。随机共振是Benzi等提出的。与传统方法不同,此方法是在非线性系统中,利用噪声能量来增强有用信号,使得输出信噪比增强。描述周期随机共振的测度指标有信噪比、信噪比增益与驻留时间分布。因为早期机械故障特征的周期性和调制性,其统计量呈现周期性变化,此时信号是循环的非平稳的周期信号,而测度指标信噪比和信噪比增益需要对特征信号有很好的估计。由于在实际中很难满足,同时信噪比是以特征频率处的幅值与同频率的背景噪声之比,所以存在局部性,不能从整体上衡量输出信号。然而驻留时间分布却很复杂,不易进行量化,工程应用中很难实现。针对以上问题,提出以二进制符号化规则的符号序列熵作为衡量随机共振输出的测度,设计蚁群算法随机共振系统进行微弱信号检测。
2 仿真代码
function snr=ZSYSR(a,b)
%Copyright Qiao Zijian, Xi'an Jiaotong University
%%%----------------仿真数据-------------------------
fs=5;%% sampling frequency
A=0.01;%% amplitude
f0=0.008;%% signal frequecy
N=5000; %% data length
D=0.05; %% noise intensity噪声强度
tt=(0:N-1)/fs;
St=A*cos(2*pi*f0*tt);
load xx; %单位噪声
XX=St+D*xx;
%%%%%----------用RK方法解SR问题。
h=1/fs;
i=1;
x(1)=0;
while i
K1=h*fun_SR(XX(i),x(i),a,b);
K2=h*fun_SR(XX(i),x(i)+K1/2,a,b);
K3=h*fun_SR(XX(i+1),x(i)+K2/2,a,b);
K4=h*fun_SR(XX(i+1),x(i)+K3,a,b);
x(i+1)=x(i)+(K1+2*K2+2*K3+K4)/6;
i=i+1;
end
x=x-mean(x);
%%%绘制输出,计算输出信噪比
frequency(x,fs,1);xlim([0,1])
y=abs(fft(x))*2/N;
maxy=y(8)+y(9)+y(10);
meanyn=(sum(y(1:1:floor(N/2)))-maxy)/(N/2-1);
snr=10*log10(maxy/meanyn)
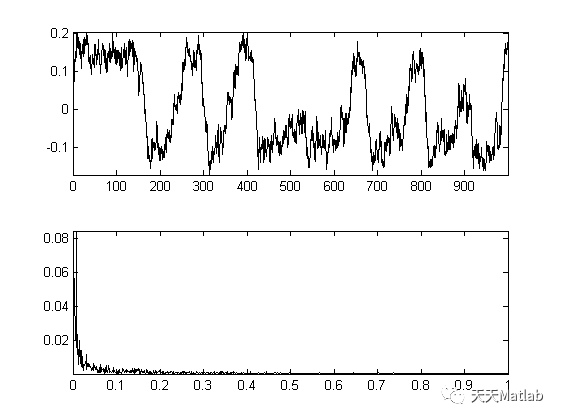
3 运行结果

4 参考文献
[1]雷亚国, 林京, 韩冬,等. 基于蚁群算法的自适应随机共振系统参数选择方法:, CN102254223A[P]. 2011.
[2]杨颖娜. 基于随机共振算法的高速机车轮对滚动轴承故障信号检测[D]. 石家庄铁道大学.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。
-
相关阅读:
环境安装-Linux虚拟机
【MySQL备份】Percona XtraBackup全量备份实战篇
MySQL——主从复制
第23章_瑞萨MCU零基础入门系列教程之ADC与DSP
TypeScript 之 Hello World!
【Java dom4j 实现解析xml文件】
ArduPilot开源飞控之AP_AHRS
都说计算机今年炸了,究竟炸到什么程度呢?
设计模式——观察者模式
k8s搭建EFK日志系统
- 原文地址:https://blog.csdn.net/qq_59747472/article/details/126356348