-
用pytorch实现神经网络
章节设置:
一、实现自带数据并自定义神经网络进行训练
二、使用自带的模型进行训练以及测试
三、用自己定义神经网络全局设定,指定了设备
事实证明,即使是1650这样的显卡也会比cpu运行得快很多,只要运行的时候显存够就行,在使用的时候有两种方式(注意——还有其他指定显卡的方式,比如cuda(),只是这种更通用,更熟悉而已):
model.to(device)tensor变量.to(device)
# 如果显卡可用,则用显卡进行训练 device = "cuda" if torch.cuda.is_available() else "cpu" # device='cpu' print(f"Using {device} device")- 1
- 2
- 3
- 4

一、实现自带数据并自定义神经网络进行训练
放在这个示例的理解:获得dataset数据–>利用加载器进行数据加载–>设计神经网络的结构–>定义优化器以及损失函数–>遍历数据进行梯度下降迭代求解最佳的梯度值–>用模型进行预测得到预测值
通用理解:数据加载–>设计网络结构–>遍历数据进行梯度下降求解到损失值的最小值或者指定次数–>保存对应的梯度参数或者直接计算test情况
通过pytorch设计网络结构,需要完成以下几点:- 定义网络结构,初始化函数init
- 定义网络节点连接方式forward函数
1. 获得dataset数据
通过从内置的数据集中获取数据,和之前的方式一样,只不过内置的给你写好了torchvision.datasets.mnist.MNIST.py,以下解释相关变量的定义
解释torchvision.datasets.mnist.MNIST.init.data相关定义以及是怎么来的
test_data = torchvision.datasets.MNIST('./mnist',train=False) # test_x= Variable(torch.unsqueeze(test_data.test_data,dim=1),volatile=True).type(torch.FloatTensor)[:2000]/255. # 压缩纬度,将第一个纬度给压没了(可以理解为x的纬度) test_x = torch.unsqueeze(test_data.data, dim=1).type(torch.FloatTensor)[:2000] / 255. #取前2000个数据- 1
- 2
- 3
- 4
对于这里面的
test_data.data的理解,torchvision.datasets.mnist.MNIST.__init__.data可以看他们的调用关系,它其实是通过MNIST类的__init__进行对象的建立,所以获得的是最终的对象,如下所示:对象=torchvision.datasets.mnist.MNIST.__init__() 对象具有data属性,所以就可以调用对象.data 综合起来就是: torchvision.datasets.mnist.MNIST.__init__.data- 1
- 2
- 3
在python的类只要函数里面调用了
self.属性=相关定义赋值,那么之后python的类就具有这样的功能。之所以要进行维度的拓展就是因为cnn的输入是
1*28*28,所以数据需要转换为batch_size*1*28*28,而扩展纬度就是通过unsqueeze,而有时候需要进行维度的统一就是通过unsqueeze以及expand,所以下面对unsqueeze以及expand的使用方法进行探究- unsqueeze可以增加一个纬度,但是维度的siz只是1而已,而expand就可以将数据进行复制,将数据变为n
import torch # 获得一开始的初始化数值:tensor([[a1,a2,a3]]) nn1=torch.rand(1,3) print(nn1) # unsqueeze是解压的意思,在第i个维度上进行扩展,将其扩展为tensor([[[a1,a2,a3]]]) nn1=nn1.unsqueeze(0) print("*"*100) print(nn1) #利用expand对数据进行扩展 nn1=nn1.expand(1,3,3) print("*"*100) print(nn1)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12

2. 利用加载器进行数据加载
分为训练数据以及测试,由于训练数据需要分批次以及打乱操作等。所以加载方式会有所不同,或者可以可以测试数据的加载更加简单粗暴一些:
- 训练集数据的加载:通过dataset加载数据集–>将数据集加载进加载器中(加载中可以设置一批次迭代的次数还有是否打乱)
- 测试集数据的加载:可以直接加载数据以及对应的目标值就行
# 1. 训练数据的加载 train_data=torchvision.datasets.MNIST( root='./mnist', train=True, transform=torchvision.transforms.ToTensor(),#从下载数据改变数据形式 #(0,1) (0,255) download=DOWNLOAD_MNIST ) train_loader=Data.DataLoader(dataset=train_data,batch_size=BATCH_SIZE,shuffle=True,num_workers=0) # 2. 测试数据的加载 #test不用像train一样分批次加载,同时也不用需要打乱,所以直接获得相关数据就行 test_data = torchvision.datasets.MNIST('./mnist',train=False) # 压缩纬度,将第一个纬度给压没了(可以理解为x的纬度) test_x = torch.unsqueeze(test_data.data, dim=1).type(torch.FloatTensor)[:2000] / 255. #取前2000个数据 转换为batch_size*1*28*28 test_y=test_data.targets[:2000]- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
3. 设计神经网络的结构
将神经网络中核心函数
init()以及forward()函数实现就行init()是实现网络中有哪些层的;forward()是实现网络中不同连接的层的连接关系的;
class CNN(nn.Module): def __init__(self): super(CNN, self).__init__() self.conv1=nn.Sequential( nn.Conv2d(#(1*28*28) #这里的1表示通道 in_channels=1, out_channels=16, kernel_size=5, stride=1, padding=2, #如果 stride=1,padding=(kernel_size-1)/2=(5-1)/2 ),# -->(16,28*28) nn.ReLU(),# -->(16,28*28) nn.MaxPool2d(kernel_size=2),# -->(16,14*14) ) self.conv2=nn.Sequential(# (16,14*14) nn.Conv2d(16,32,5,1,2),#加工32层-->(32 14*14) nn.ReLU(),#-->(32 14*14) nn.MaxPool2d(2),#-->(32 7*7) ) self.out=nn.Linear(32*7*7,10) #把前面的纬度32*7*7变成10 def forward(self,x): x=self.conv1(x) x=self.conv2(x) #(batch, 32 ,7,7) x=x.view(x.size(0),-1) #(batch,32*7*7) output=self.out(x) return output- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
4. 定义优化器以及损失函数
optimizer = torch.optim.Adam(cnn.parameters(),lr=LR) #Adam是梯度下降的一种方法,将神经网络的参数以及传播率传进去 print(cnn.parameters()) loss_func = nn.CrossEntropyLoss() #损失函数的定义- 1
- 2
- 3
5. 遍历数据进行梯度下降
梯度下降+每到50次进行相关信息的输出或者一些处理
梯度下降
- 确定函数中优化器以及损失函数都已经设置好了
- 损失函数定义以及调用
loss = loss_func(output, y) - 优化器的置零:
optimizer.zero_grad() - 反向传播:
loss.backward() - 梯度迭代更新:
optimizer.step()
批量输出相关信息或者批量处理数据
批量处理数据,也就是epoch=50,这里没有设置相关的变量而是用
if step % 50 == 0:#表示已经进行了50的倍数了进行判断了,并且这里只做了相关的输出,并没有其他的操作(比如有时候可以对方差做一个汇总使得信息的整体性更强)for epoch in range(EPOCH): for step, (x, y) in enumerate(train_loader): # 50*10 最后输出是分类的概率大小 output = cnn(x) # 得到网络中的输出数据 loss = loss_func(output, y) # 计算每一个网络的损失值 optimizer.zero_grad() # 在下一次求导之前将保留的grad清空 loss.backward() # 反向传播,计算梯度 optimizer.step() # 应用求导到优化器上去 if step % 50 == 0:#表示已经进行了50的倍数了 test_output = cnn(test_x) # 在分类问题中,通常需要使用max()函数对softmax函数的输出值进行操作,求出预测值索引,然后与标签进行比对,计算准确率。其中1表示纬度 # 函数会返回两个tensor,第一个tensor是每行的最大值;第二个tensor是每行最大值的索引。我们需要的是第二个的索引,本来是tensor的格式,这里需要化为numpy格式 pred_y = torch.max(test_output, 1)[1].data.numpy() # size()考虑到可能大小也是有纬度的,所以取的是第一个纬度 # 这里的loss.data.numpy()和accuracy都是一纬的,如果是数组就直接把数据给输出了,这里也是可以的 accuracy = sum(pred_y == test_y.data.numpy()) / test_y.size(0) print('Epoch: ', epoch, '| train loss: %.4f' % loss.data.numpy(), '| test accuracy: %.2f' % accuracy)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
6. 用模型进行预测得到预测值
torch.max的使用见:https://blog.csdn.net/weixin_42295969/article/details/126352240?csdn_share_tail=%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22126352240%22%2C%22source%22%3A%22weixin_42295969%22%7D
# 从测试数据中计算10个预测,[:10]表示列表中第一项到第10项 test_output = cnn(test_x[:10]) # 这里为什么是max从而获得预测值 pred_y = torch.max(test_output, 1)[1].data.numpy() #返回的是最大值的索引,最大的概率值 print(pred_y, 'prediction number') print(test_y[:10].numpy(), 'real number')- 1
- 2
- 3
- 4
- 5
- 6
代码:
链接:https://pan.baidu.com/s/1m6GE2Qkx6YZEYUcCnHn0ow?pwd=cu0s
提取码:cu0s二、使用自带的模型进行训练以及测试
备注:与《一》使用相同的数据,代码在代码
与前面的对比(括号内是这个进行的改动):1、获得dataset数据–>2、利用加载器进行数据加载–>3、设计神经网络的结构(直接导入已有的神经网络结构)–>4、定义优化器以及损失函数–>5、遍历数据进行梯度下降求解–>6、用模型进行预测得到预测值
注意:核心关注3,这是与前面不同的地方,并且增加了6预测的对比,如果对预测感兴趣,可以参考6(文中已高亮标记)1-2 获得dataset数据–>利用加载器进行数据加载
与之前的一样进行加载数据
3. 神经网络的设计
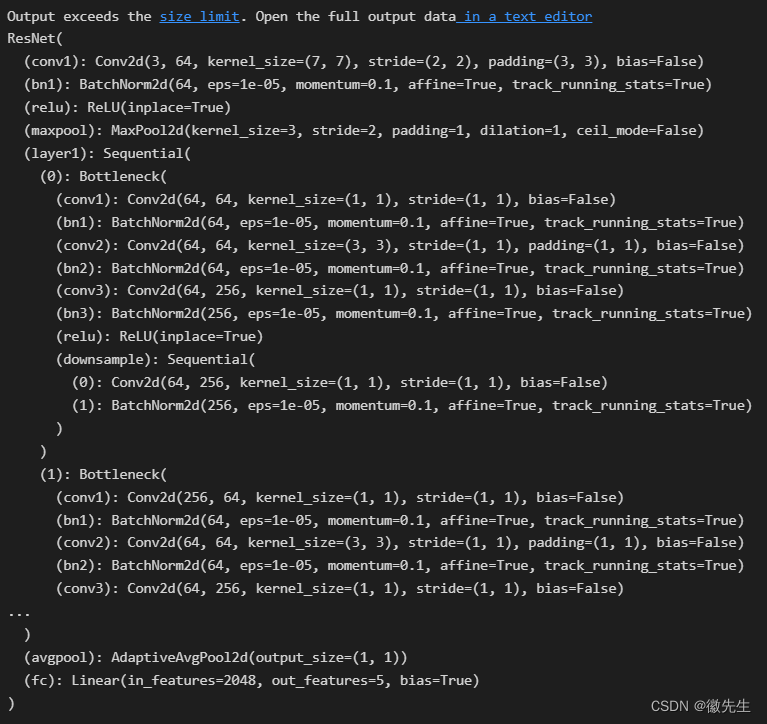
可以直接导入自带的神经网络,这里以导入ResNet网络为例:
''' 随着模型的加深,需要训练的模型参数量增加,相同的训练次数下模型训练准确率起来得更慢 ''' # model = alexnet(pretrained=False, num_classes=5).to(device) # 29.3% ''' VGG系列 ''' # model = vgg11(pretrained=False, num_classes=5).to(device) # 23.1% # model = vgg13(pretrained=False, num_classes=5).to(device) # 30.0% # model = vgg16(pretrained=False, num_classes=5).to(device) ''' ResNet系列 ''' # model = resnet18(pretrained=False, num_classes=5).to(device) # 43.6% # model = resnet34(pretrained=False, num_classes=5).to(device) # model = resnet50(pretrained= False, num_classes=5).to(device) model = resnet101(pretrained=False, num_classes=5).to(device) # 26.2% # model = resnet152(pretrained=False, num_classes=5).to(device)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
示例说明
from torchvision.models import resnet18, resnet34,resnet50, resnet101, resnet152 # ResNet系列 model = resnet101(pretrained=False, num_classes=5).to(device) # 26.2% print(model)- 1
- 2
- 3
4、定义优化器以及损失函数
与前面一样的定义方法,先定义后调用
5、遍历数据进行梯度下降求解
迭代进行训练以及测试,其中训练的函数
train里就保存了进行梯度下降求解的方法包含梯度下降求解法的train
这里就将所有的数据训练了一轮就行,复杂的就会涉及到epoch以及batch_size的概念
- 当一个完整的数据集通过了神经网络一次并且返回了一次,这个过程称为一个 epoch。
- 在不能将数据一次性通过神经网络的时候,就需要将数据集分成几个 batch,所以下面的batch仅仅只是表示批次。
# 定义训练函数,需要 def train(dataloader, model, loss_fn, optimizer): size = len(dataloader.dataset) # 从数据加载器中读取batch(一次读取多少张,即批次数),X(图片数据),y(图片真实标签)。 for batch, (X, y) in enumerate(dataloader): # 将数据存到显卡 X, y = X.to(device), y.to(device) # 得到预测的结果pred pred = model(X) # 计算预测的误差 # print(pred,y) loss = loss_fn(pred, y) # 反向传播,更新模型参数 optimizer.zero_grad() #梯度清零 loss.backward() #反向传播 optimizer.step() #更新参数 # 每训练10次,输出一次当前信息 if batch % 10 == 0: loss, current = loss.item(), batch * len(X) print(f"loss: {loss:>7f} [{current:>5d}/{size:>5d}]")- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
6、用模型进行预测得到预测值
设置为测试模型并设置不计算梯度,进行测试数据集的加载,判断预测值与实际标签是否一致,统一正确信息个数
设置为测试模型并设置不计算梯度
# 将模型转为验证模式 model.eval() # 测试时模型参数不用更新,所以no_gard() with torch.no_grad(): # 加载数据加载器,得到里面的X(图片数据)和y(真实标签) for X, y in dataloader: 加载数据 pred = model(X)#进行预测 # 预测值pred和真实值y的对比 test_loss += loss_fn(pred, y).item() # 统计预测正确的个数 correct += (pred.argmax(1) == y).type(torch.float).sum().item()#返回相应维度的最大值的索引 test_loss /= size correct /= size print(f"correct = {correct}, Test Error: \n Accuracy: {(100*correct):>0.1f}%, Avg loss: {test_loss:>8f} \n")- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
7. 保存好训练好的模型
torch.save(model.state_dict(), "model_resnet101.pth") print("Saved PyTorch Model Success!")- 1
- 2
代码:https://gitee.com/sxh_and_ll/AI-CV/tree/master/proj/%E4%BD%BF%E7%94%A8pytorch%E8%87%AA%E5%B8%A6%E6%A8%A1%E5%9E%8B%E8%AE%AD%E7%BB%83%E4%BB%A5%E5%8F%8A%E6%B5%8B%E8%AF%95三、使用自己定义神经网络
使用自己定义的神经网络仅仅只是要写神经网络结构就是,只需要将模型继承
nn.moudle类,另外实现init以及forward方法就行 -
相关阅读:
vue双向绑定的原理和使用
AUTOCAD——坐标轴固定、CAD使用环形阵列绘制图形
带妹妹学密码系列三 ——分组密码(二)
大学康复训练
Map和Set(下)
代码随想录算法训练营第23期day26|39. 组合总和、40.组合总和II、131.分割回文串
尚硅谷SpringBoot3笔记
零基础HTML教程(31)--HTML5多媒体
Servlet —— Tomcat, 初学 Servlet 程序
【云驻共创】GaussDB(DWS)云数仓工作负载管理流程体验
- 原文地址:https://blog.csdn.net/weixin_42295969/article/details/126352278
