-
ROS中的坐标转换1
1、坐标转换
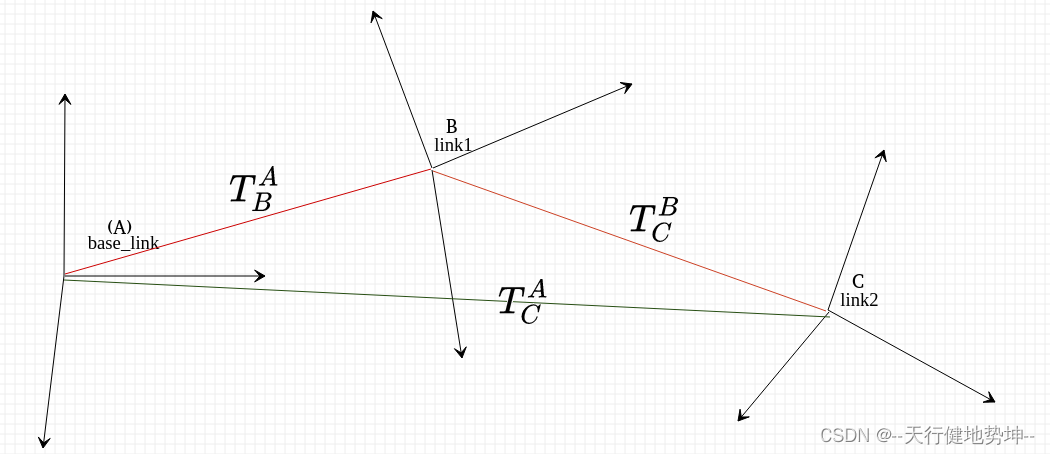
坐标转换是指坐标系之间的平移以及旋转关系,如坐标系A,B,C。A,B之间存在一个转换关系 T B A T_{B}^{A} TBA,B与C之间存在转换关系 T C B T_{C}^{B} TCB,我们知道了B相对于A的关系,C相对于B的转换关系,同样我们可以A,C之间也存在着转换关系 T C A T_{C}^{A} TCA. 根据两者之间的转换关系可以得到 T C A T_{C}^{A} TCA= T B A T_{B}^{A} TBA * T C B T_{C}^{B} TCB.
如图所示
2、lookupTransform获取坐标系之间的转换关系
2.1 lookupTransform
原型:
void Transformer:: lookuptransform (const std::string & target_frame,const std::string & source_frame, const ros::Time & Time, StampedTransform & transform)- 1
- target_frame:目标坐标系,数据应该转到的坐标系
- source_frame:源坐标系,数据来源坐标系
- Time:时间,使用 ros::Time(0),使用ros::time::now()存在问题
- transform:存在转换关系
使用步骤:
- 获取TransformListener监听器
tf::TransformListener* tfListener= new tf::TransformListener;- 1
- 定义StampedTransform保存关系
tf::StampedTransform stfBaseToLink2, stfBaseToLink1, stfLink1ToLink2;- 1
- 使用
while (tferr) { tferr=false; try { tfListener->lookupTransform("base_link", "link1", ros::Time(0), tfLink2WrtBaseLink); } catch(tf::TransformException &exception) { ROS_WARN("%s; retrying...", exception.what()); tferr=true; ros::Duration(0.5).sleep(); continue; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
注意:要使用try…catch进行获取,而且一次可能获取不到。
3、基于lookupTransform证明 T C A T_{C}^{A} TCA= T B A T_{B}^{A} TBA * T C B T_{C}^{B} TCB.
- 获取B相对于A的转换关系( T B A T_{B}^{A} TBA )
while (tferr) { tferr=false; try { tfListener->lookupTransform("base_link", "link1", ros::Time(0), tfLink2WrtBaseLink); } catch(tf::TransformException &exception) { ROS_WARN("%s; retrying...", exception.what()); tferr=true; ros::Duration(0.5).sleep(); continue; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 获取C相对于B转换关系( T C B T_{C}^{B} TCB)
while (tferr) { tferr=false; try { tfListener->lookupTransform("link1", "link2", ros::Time(0), stfLink1ToLink2); } catch(tf::TransformException &exception) { ROS_WARN("%s; retrying...", exception.what()); tferr=true; ros::Duration(0.5).sleep(); // sleep for half a second continue; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 进行把StampedTransform转换Transform
tf::Transform tfBaseToLink1(tfLink2WrtBaseLink.getBasis(),tfLink2WrtBaseLink.getOrigin()) tf::Transform tfBaseToLink2(stfLink1ToLink2.getBasis(),stfLink1ToLink2.getOrigin())- 1
- 2
- 进行 T B A T_{B}^{A} TBA * T C B T_{C}^{B} TCB
altTfBaseToLink2 = tfBaseToLink1*tfLink1ToLink2;- 1
- 获取C相对于A的转换关系( T C A T_{C}^{A} TCA)
while (tferr) { tferr=false; try { tfListener->lookupTransform("base_link", "link2", ros::Time(0), stfBaseToLink2); } catch(tf::TransformException &exception) { ROS_WARN("%s; retrying...", exception.what()); tferr=true; ros::Duration(0.5).sleep(); // sleep for half a second continue; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 进行把StampedTransform转换Transform
tf::Transform tfBaseToLink2(stfBaseToLink2.getBasis(),stfBaseToLink2.getOrigin())- 1
- 打印结果
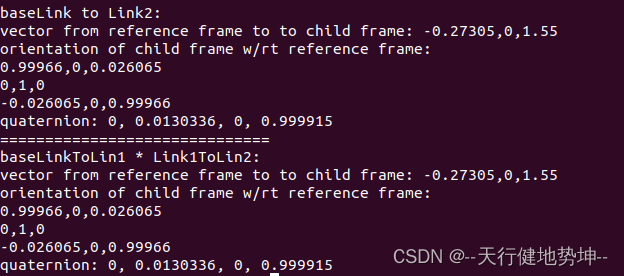
全部代码(修改于ROS机器人编程示例)
#include#include #include #include #include //ALWAYS need to include this #include #include #include #include #include #include using namespace std; void printTf(tf::Transform tf) { tf::Vector3 tfVec; tf::Matrix3x3 tfR; tf::Quaternion quat; tfVec = tf.getOrigin(); cout<<"vector from reference frame to to child frame: "<<tfVec.getX()<<","<<tfVec.getY()<<","<<tfVec.getZ()<<endl; tfR = tf.getBasis(); cout<<"orientation of child frame w/rt reference frame: "<<endl; tfVec = tfR.getRow(0); cout<<tfVec.getX()<<","<<tfVec.getY()<<","<<tfVec.getZ()<<endl; tfVec = tfR.getRow(1); cout<<tfVec.getX()<<","<<tfVec.getY()<<","<<tfVec.getZ()<<endl; tfVec = tfR.getRow(2); cout<<tfVec.getX()<<","<<tfVec.getY()<<","<<tfVec.getZ()<<endl; quat = tf.getRotation(); cout<<"quaternion: " <<quat.x()<<", "<<quat.y()<<", " <<quat.z()<<", "<<quat.w()<<endl; } tf::Transform get_tf_from_stamped_tf(tf::StampedTransform sTf) { tf::Transform tf(sTf.getBasis(),sTf.getOrigin()); //construct a transform using elements of sTf return tf; } void printStampedTf(tf::StampedTransform sTf){ tf::Transform tf; cout<<"frame_id: "<<sTf.frame_id_<<endl; cout<<"child_frame_id: "<<sTf.child_frame_id_<<endl; tf = get_tf_from_stamped_tf(sTf); //extract the tf from the stamped tf printTf(tf); //and print its components } //fnc to print components of a stamped pose void printStampedPose(geometry_msgs::PoseStamped stPose){ cout<<"frame id = "<<stPose.header.frame_id<<endl; cout<<"origin: "<<stPose.pose.position.x<<", "<<stPose.pose.position.y<<", "<<stPose.pose.position.z<<endl; cout<<"quaternion: "<<stPose.pose.orientation.x<<", "<<stPose.pose.orientation.y<<", " <<stPose.pose.orientation.z<<", "<<stPose.pose.orientation.w<<endl; } int main(int argc, char * argv[]) { ros::init(argc, argv, "listentext"); ros::NodeHandle nh; tf::TransformListener* tfListener= new tf::TransformListener; tf::StampedTransform stfBaseToLink2, stfBaseToLink1, stfLink1ToLink2; tf::StampedTransform testStfBaseToLink2; tf::Transform tfBaseToLink1, tfLink1ToLink2, tfBaseToLink2, altTfBaseToLink2; bool tferr=true; ROS_INFO("waiting for tf between link2 and base_link..."); tf::StampedTransform tfLink2WrtBaseLink; while (tferr) { tferr=false; try { //try to lookup transform, link2-frame w/rt base_link frame; this will test if // a valid transform chain has been published from base_frame to link2 tfListener->lookupTransform("base_link", "link1", ros::Time(0), tfLink2WrtBaseLink); } catch(tf::TransformException &exception) { ROS_WARN("%s; retrying...", exception.what()); tferr=true; ros::Duration(0.5).sleep(); // sleep for half a second continue; } } // printStampedTf(stfBaseToLink1); tfBaseToLink1 = get_tf_from_stamped_tf(tfLink2WrtBaseLink); tferr = true; while (tferr) { tferr=false; try { tfListener->lookupTransform("link1", "link2", ros::Time(0), stfLink1ToLink2); } catch(tf::TransformException &exception) { ROS_WARN("%s; retrying...", exception.what()); tferr=true; ros::Duration(0.5).sleep(); // sleep for half a second continue; } } tfLink1ToLink2 = get_tf_from_stamped_tf(stfLink1ToLink2); tferr = true; while (tferr) { tferr=false; try { tfListener->lookupTransform("base_link", "link2", ros::Time(0), stfBaseToLink2); } catch(tf::TransformException &exception) { ROS_WARN("%s; retrying...", exception.what()); tferr=true; ros::Duration(0.5).sleep(); // sleep for half a second continue; } } printStampedTf(stfBaseToLink2); tfBaseToLink2 = get_tf_from_stamped_tf(stfBaseToLink2); cout << endl << "baseLink to Link2:" << endl; printTf(tfBaseToLink2); cout<<"=============================="; altTfBaseToLink2 = tfBaseToLink1*tfLink1ToLink2; cout << endl << "baseLinkToLin1 * Link1ToLin2: " << endl; printTf(altTfBaseToLink2); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
-
相关阅读:
java基于Springboot+vue的影城电影院购票选座系统 elementui 前后端分离
算法学习day10(贪心算法)
【遮天】韩老魔被灭小囡囡现身,好消息叶凡终于不跑酷了,但有坏消息
软考网络工程师每日一练10.17
vue3中$refs使用调整
出栈合法性(acm模式,中等)
如何搭建一个基础的springmvc+mybatis项目
缓存穿透、雪崩与击穿
使用navicat连接openGauss数据库
Python采集世界大学排行榜,做数据可视化,来看看你的大学上榜没
- 原文地址:https://blog.csdn.net/u011573853/article/details/126333900


