-
LeGo-LOAM框架后端优化总结
LeGo-LOAM框架后端优化总结
LeGo-LOAM是发表于IROS2018年的文章,全称为:Lightweight and Ground-Optimize Lidar Odometry and Mapping on Variable Terrain.
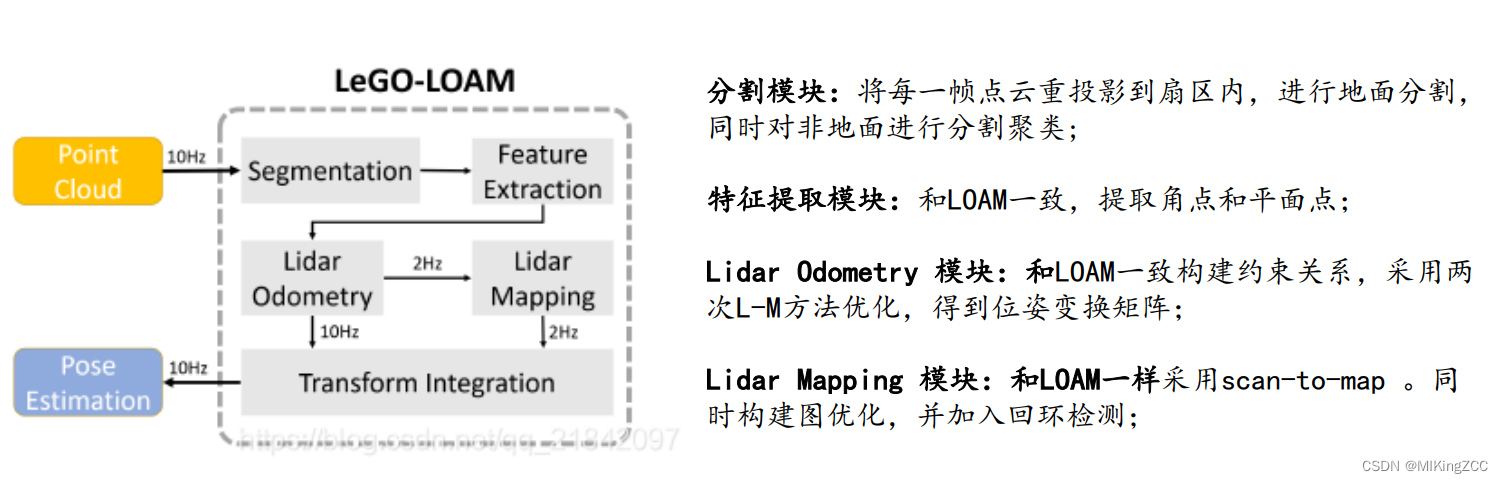
一、Lidar Mapping 原理
流程:
- transformAsscoiateToMap()
根据trasnformSum 和 transformAftMapped得到transformTobeMapped - extractSurroundingKeyFrames()
提取周围关键帧组成submap - downSampleCurrentScan()
下采样当前帧 - scan2MapOptimization()
scan to map 的优化 - saveKeyFramesAndFactor()
保存关键帧和因子 - correctPoses()
校正位姿
其中1、3、4与LOAM中的处理基本一致。
二、提取周围关键帧组成SubMap
在extractSurroundingKeyFrames()函数中,若回环检测功能开启,则加载历史中最近的50个关键帧形成点云地图(当组成SubMap的关键帧少于50帧时,直接添加即可;当组成SubMap的关键帧等于50帧时,添加新的关键帧之前需要剔除最初的关键帧);若回环检测功能关闭,则加载历史中最近的50个关键帧形成点云地图。 (对于已有的SubMap每次需要删除不在周围区域的关键帧)。
三、保存关键帧和因子
选择关键帧:当前帧和之前帧的距离大于0.3米
bool saveThisKeyFrame = true; if (sqrt((previousRobotPosPoint.x-currentRobotPosPoint.x)*(previousRobotPosPoint.x-currentRobotPosPoint.x) +(previousRobotPosPoint.y-currentRobotPosPoint.y)*(previousRobotPosPoint.y-currentRobotPosPoint.y) +(previousRobotPosPoint.z-currentRobotPosPoint.z)*(previousRobotPosPoint.z-currentRobotPosPoint.z)) < 0.3){ saveThisKeyFrame = false; } // saveThisKeyFrame为false,并且cloudKeyPoses3D不为空 if (saveThisKeyFrame == false && !cloudKeyPoses3D->points.empty()) return- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9

gtsam插入先验因子:gtSAMgraph.add(PriorFactor<Pose3>(0, Pose3(Rot3::RzRyRx(transformTobeMapped[2], transformTobeMapped[0], transformTobeMapped[1]), Point3(transformTobeMapped[5], transformTobeMapped[3], transformTobeMapped[4])), priorNoise)); initialEstimate.insert(0, Pose3(Rot3::RzRyRx(transformTobeMapped[2], transformTobeMapped[0], transformTobeMapped[1]),Point3(transformTobeMapped[5], transformTobeMapped[3], transformTobeMapped[4])));- 1
- 2
gtsam插入里程计因子,更新关键帧:
gtsam::Pose3 poseFrom = Pose3(Rot3::RzRyRx(transformLast[2], transformLast[0], transformLast[1]),Point3(transformLast[5], transformLast[3], transformLast[4])); gtsam::Pose3 poseTo = Pose3(Rot3::RzRyRx(transformAftMapped[2], transformAftMapped[0], transformAftMapped[1]),Point3(transformAftMapped[5], transformAftMapped[3], transformAftMapped[4])); gtSAMgraph.add(BetweenFactor<Pose3>(cloudKeyPoses3D->points.size()-1, cloudKeyPoses3D->points.size(), poseFrom.between(poseTo), odometryNoise)); initialEstimate.insert(cloudKeyPoses3D->points.size(), Pose3(Rot3::RzRyRx(transformAftMapped[2], transformAftMapped[0], transformAftMapped[1]),Point3(transformAftMapped[5], transformAftMapped[3], transformAftMapped[4])));- 1
- 2
- 3
- 4
更新gtsam:
isam->update(gtSAMgraph, initialEstimate); isam->update(); gtSAMgraph.resize(0); initialEstimate.clear();- 1
- 2
- 3
- 4
- 5
四、回环检测
回环检测可以消除漂移(drift),通过ICP算法对比当前帧和之前帧是否匹配,如果匹配则进行图优化。回环检测在loopClosureThread中进行。
基本选择原则:
1 将关键帧点云建立kdtree,根据当前位置点,搜索出一定距离范围内的点云;
2 同时遍历距离由近到远的点,其时间与当前时间间隔在30s以上认为检测到回环;
3 根据搜到的回环帧,合并周围的其周围多帧的点云,以进行后续的回环检测;如果检测到回环之后,接着进行ICP匹配,然后进行图优化。
icp配准:
1 将当前帧点云与回环检测出的邻近帧点云进行icp配准,得到位姿变换矩阵;
2 更新图,进行优化;
- transformAsscoiateToMap()
-
相关阅读:
将数据库拿到的数据渲染到elementUI 中的table中去
最新宝塔反代openai官方API开发接口详细搭建教程,解决502 Bad Gateway问题
利用python的强大函数库,实现波形的小波降噪、带通滤波、时阈分析、FFT波形转换
【S2021006基于Python的协同过滤算法的电影推荐系统-哔哩哔哩】 https://b23.tv/42Ygkd6
网络架构新升级:400G OSFP光模块系列产品概述
VS Code结构体无法正确引出成员变量
第十一章 共用体union和枚举enum
[C#]插件编程框架 MAF 开发总结
函数和二维数组
client offset scroll 之间的区别
- 原文地址:https://blog.csdn.net/weixin_44156680/article/details/126299796