-
IE惯导数据紧组合处理过程与方法
本次实验使用NovAtel公司的Inertial Explorer软件,该软件可实现后处理差分、松组合、紧组合等数据处理功能。数据转换
惯导后处理数据转换
从惯导导出的后处理数据为_G文件,该文件可在IE中进行数据转换,转换为IE可识别并进行处理的 .gpb,.epp和.imr格式的数据。首先,将惯导后处理数据导入(图1),并点击转换按钮,便可完成数据转换,转换后的.gpb,.epp和.imr数据文件保存在原数据文件路径(图2)。
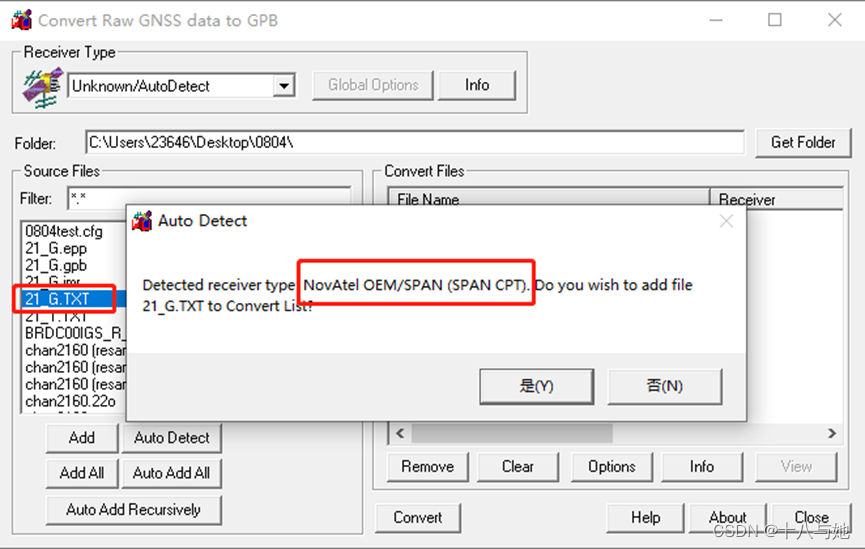
图1 导入后处理数据

图2 数据转换成功基站静态数据转换
中海达V200接收机导出的静态数据为Rinex格式的观测值o文件以及卫星星历p文件,这两种文件均可在IE中完成转换,数据转换类型如1.1所示。基站数据转换过程及结果见图3-4。
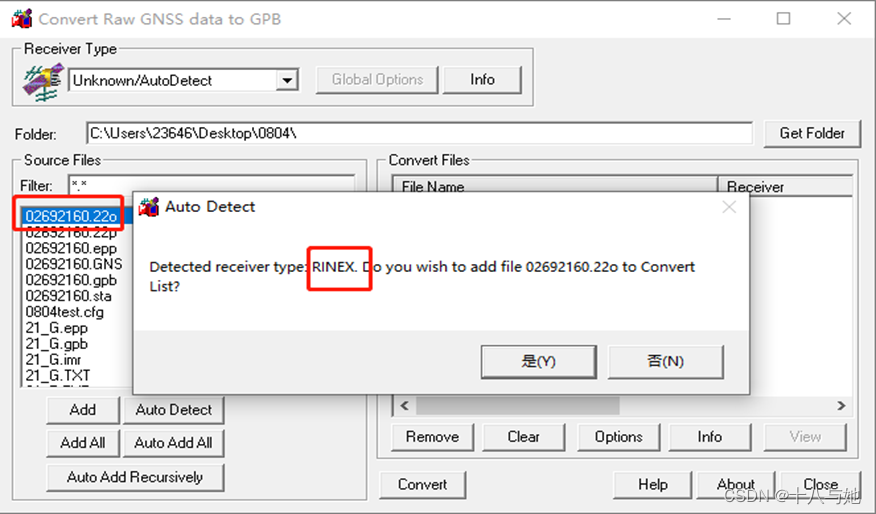
图3 导入基站数据
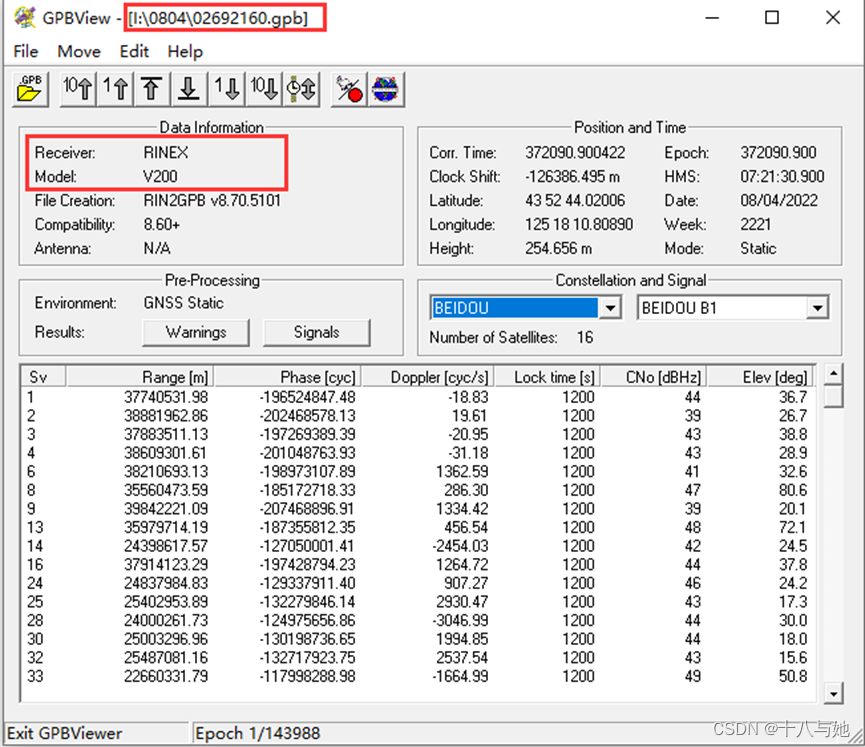
图4 基站数据转换成功长春站静态数据转换
长春站的静态数据用于解算基准站坐标,本次采用的方法是在IE中进行后处理差分,以得到高精度的基站坐标值。如前所述,需要将基站的Rinex格式的观测O文件以及IGS发布的当天的星历文件导入到IE中(图5),并进行转换,转换结果见图6。
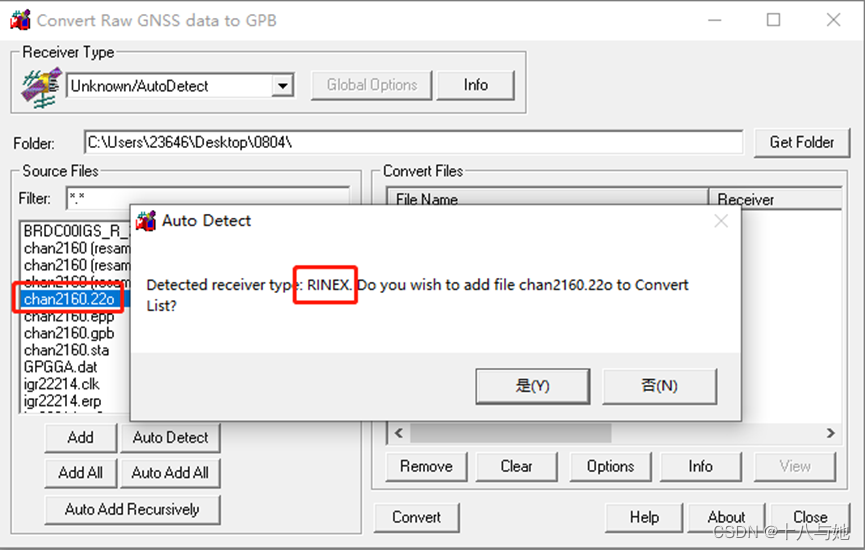
图5 导入长春站数据注意
数据所在文件夹路径需全部由英文构成,否则会出现不显示文件名、不显示文件等错误。
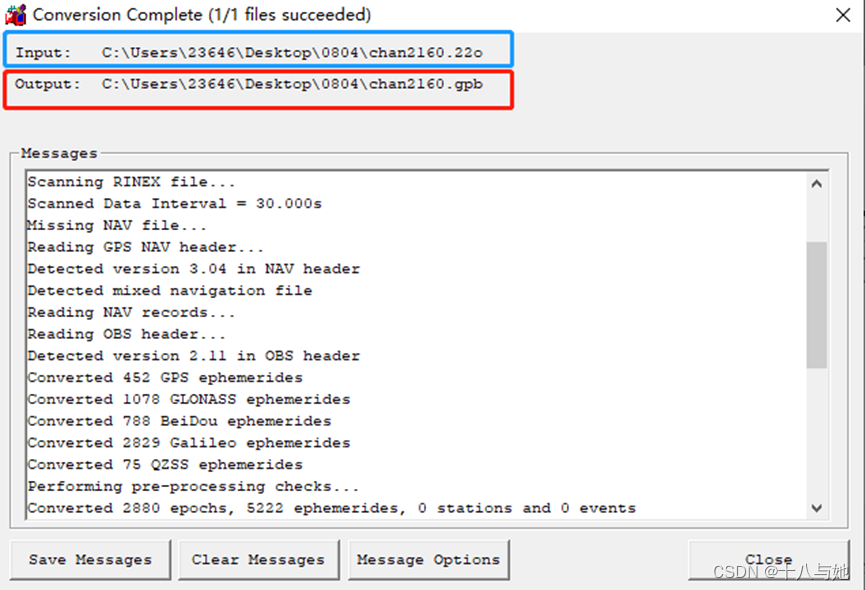
图6 数据转换成功基站坐标解算
在进行后处理差分时,基站作为参考点提供相应信息,是移动站位置解算的基础,因此需要知道基准站的精确坐标。要得到单点的精确坐标,可采取两种办法:1.使用IGS发布的精密产品,进行精密单点定位。2.联合长春IGS站数据进行差分解算。由于IGS发布的最终精密产品周期大概为14天,因此,本次基站坐标解算采用后处理差分的方法。
数据导入
首先将第一部分转换的长春站和基准站数据依次导入到IE中(图7-8),其中在导入长春站的数据时,由于它是该过程的精确参考,所以需要输入长春站的精确坐标。长春站的坐标采用IGS数据中心发布的周解,精确坐标为东经125°26′39.1″、北纬43°47′26.5″,高程273.3m。
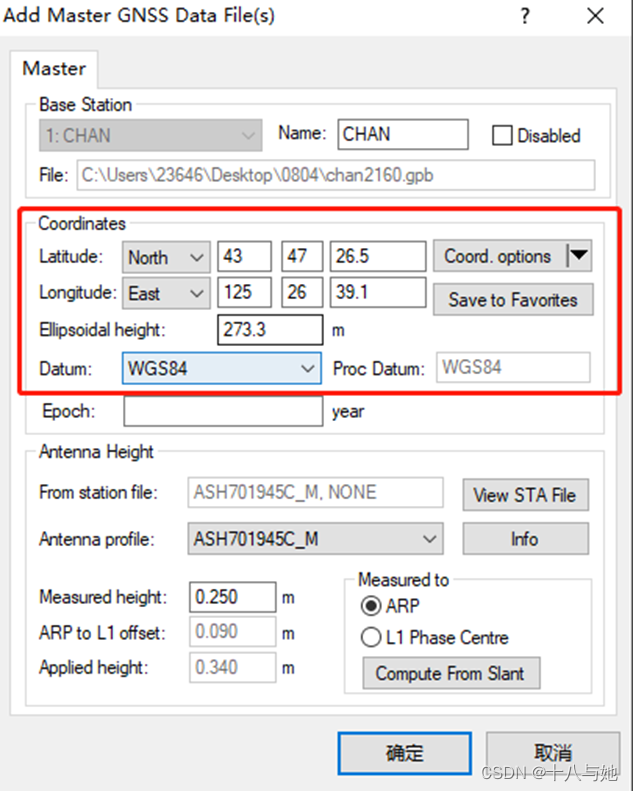
图7 导入长春站数据
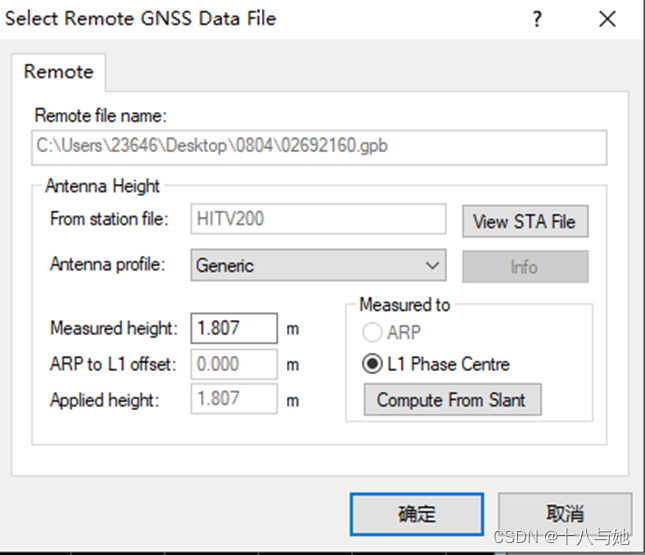
图8 导入基准站数据数据解算
在导入上述两站数据后,点击工具栏中的Process选项,选择下拉菜单中的Process GNSS,此时在弹出的对话框中(图9),选择Differential GNSS,同时设置GNSS静态处理模式和WGS84基准,选择完毕后,开始进行差分处理,处理过程中可看到,解算效果非常好(图10)。
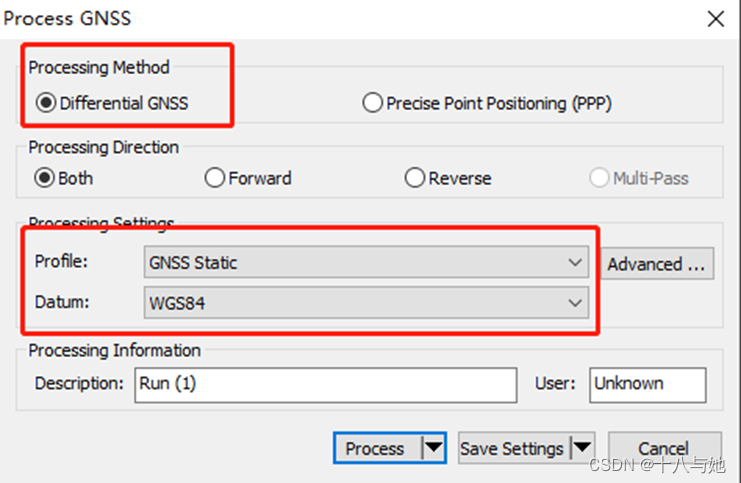
图9 差分设置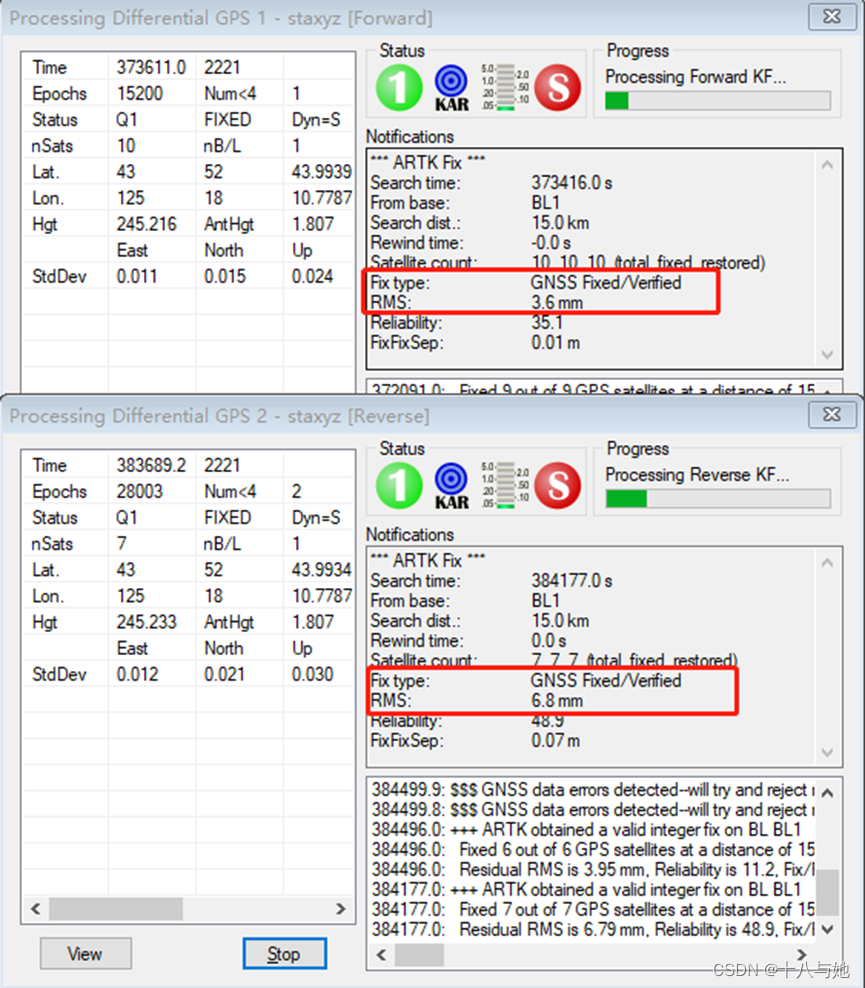
图10 解算过程
经过正反向解算以及数据平滑处理,最终得到基准站的固定解坐标值(图11)为:东经125°18′10.77813″、北纬43°52′43.99472″,高程245.246m。在后续进行惯导后处理差分时,使用该坐标值作为基准站真值。
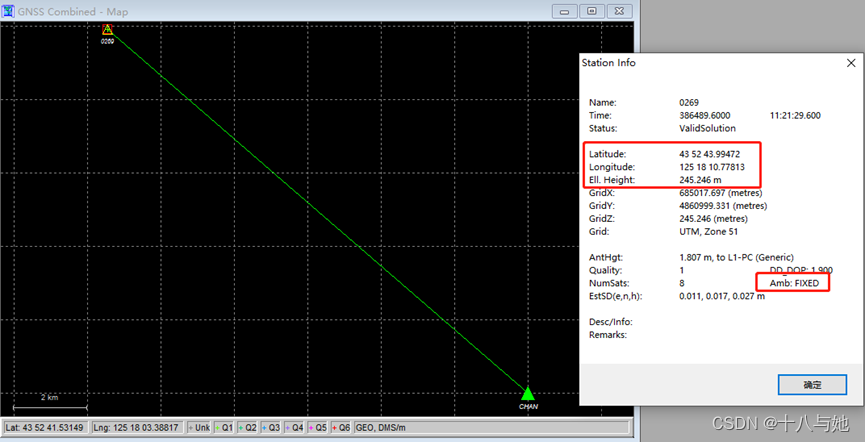
图11 基站坐标结果惯导后处理
惯导后处理过程包括GNSS差分解算和组合导航后处理(紧组合)两部分。
数据导入
惯导后处理要将第一部分转换的惯导后处理数据以及基站数据一次导入IE中(图12-17)。在导入基站数据的时候,在输入已知坐标时(图13),将第二部分解算的坐标作为真值输入,并选择WGS84作为基准。
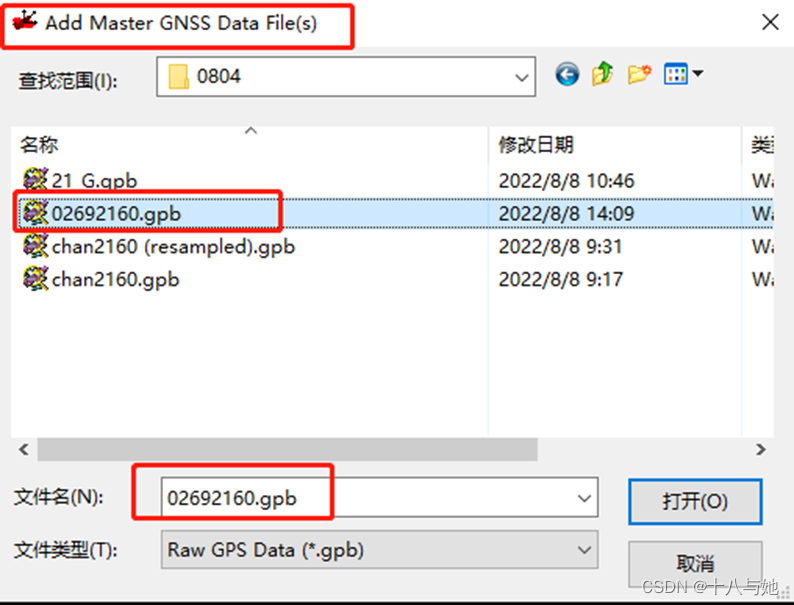
图12 导入基站数据
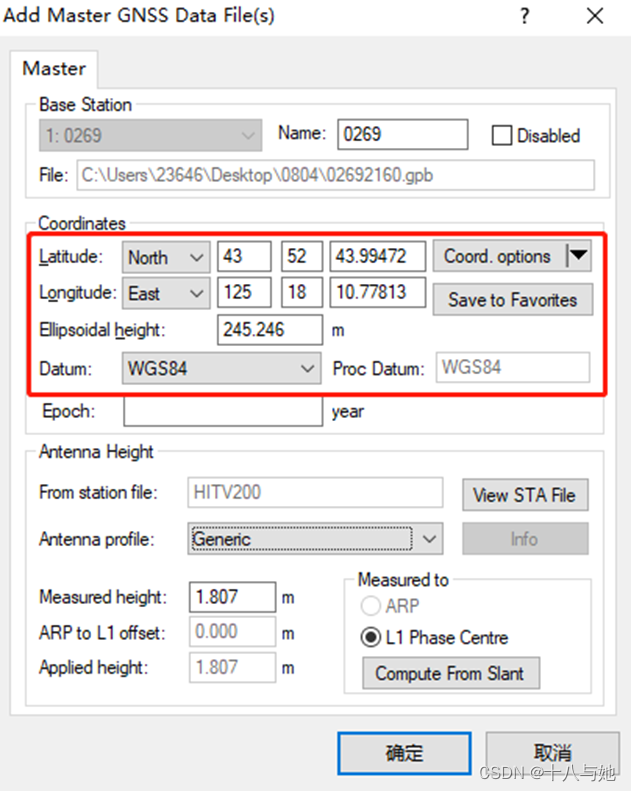
图13 输入基站已知坐标
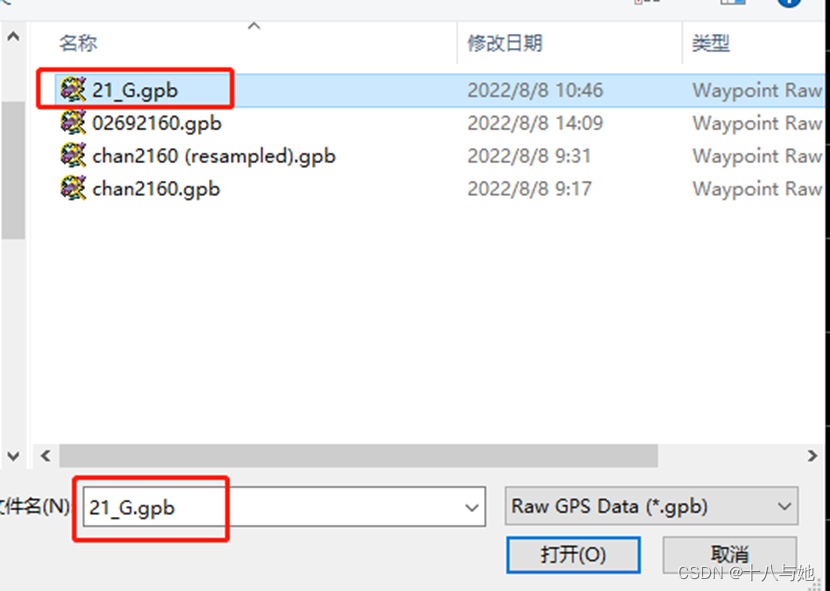
图14 导入惯导数据
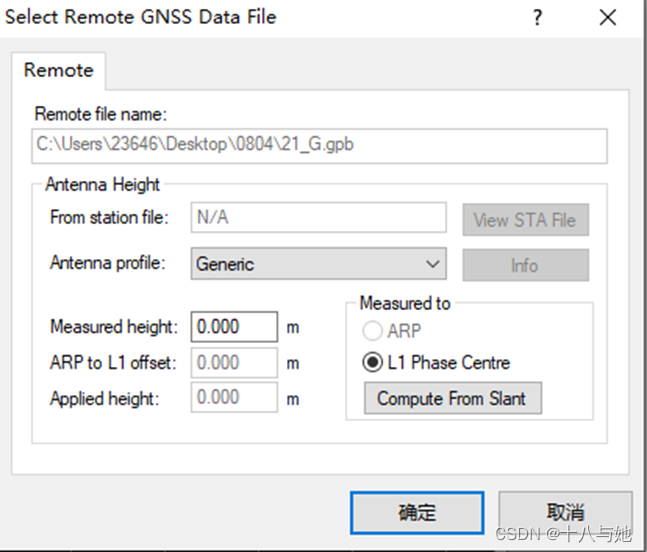
图15 惯导数据导入默认选项
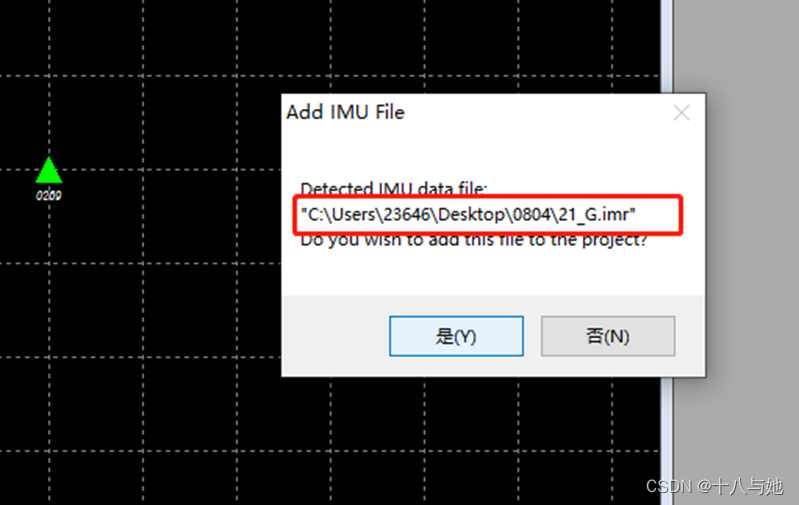
图16 同时添加imr数据
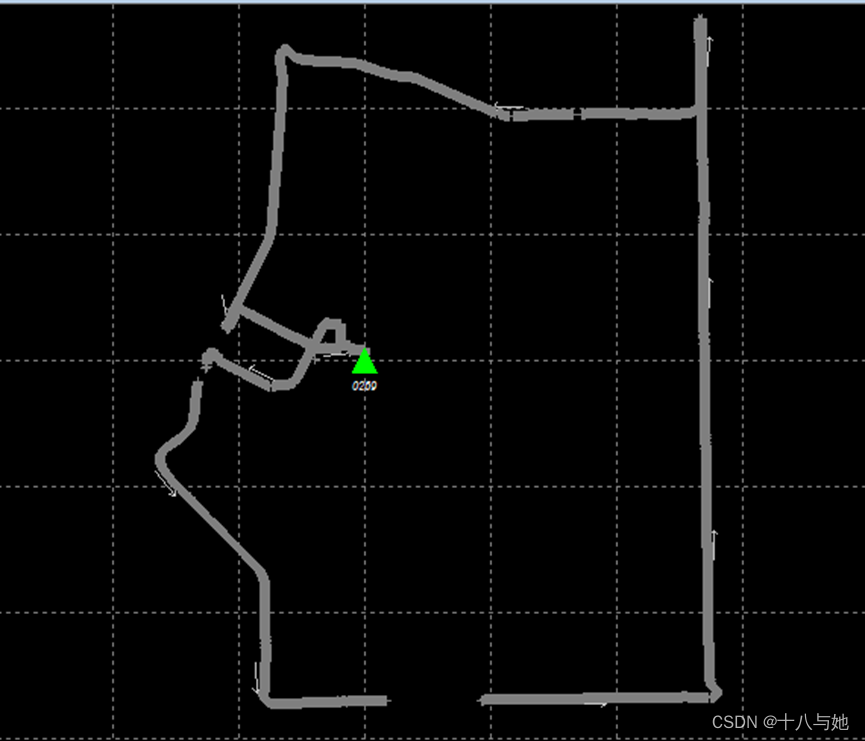
图17 基站和惯导数据添加完成GNSS差分
在惯导移动站进行动态采集时,位于校区内的基准站始终保持着与惯导移动站的同步观测,因此要想得到采集轨迹的任意位置的信息,就需要利用基准站进行后处理差分,得到任意位置的固定解。在IE中,Process选项下的Process GNSS可完成后处理解算,将处理模式改为车载模式,基准选择WGS84即可(图18)。惯导后处理差分解算过程分为正反向解算,IE会实时显示解算状态(图19)。在解算完毕后,原本灰色的轨迹会变成对应不同解算状态的颜色,差分解算后的轨迹可见图20。颜色对应的解的状态在报告末的附录 A中。
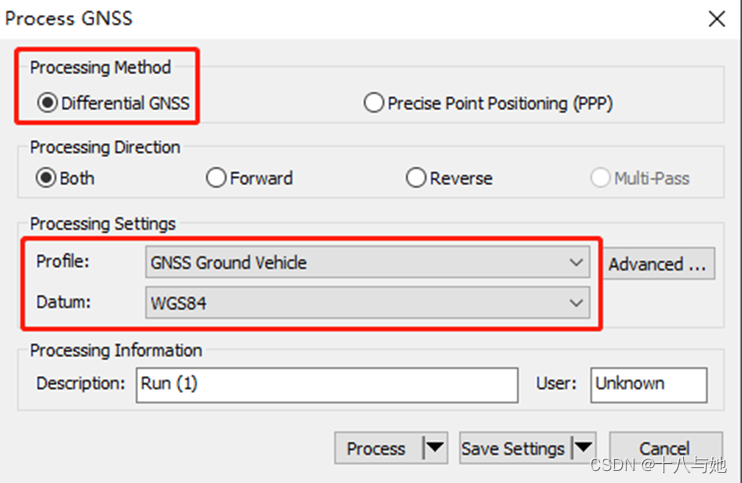
图18 惯导差分设置
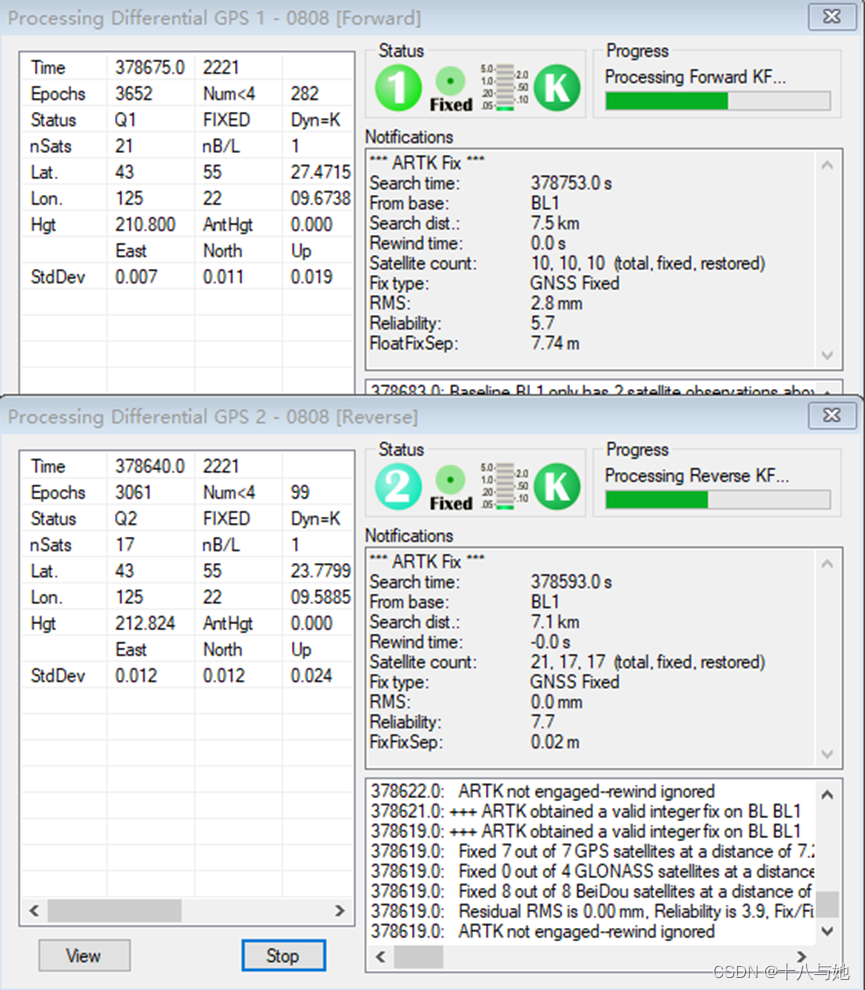
图19 惯导后处理差分中
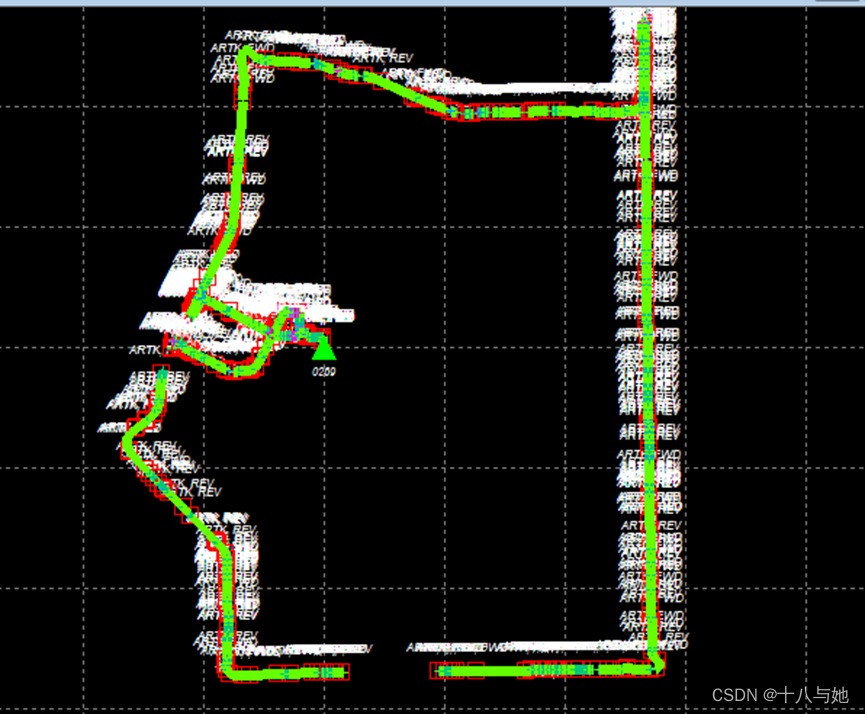
图20 惯导差分后处理完成组合导航后处理
在上述差分解算完成后,轨迹上任意时刻的位置为已知状态,此时可与惯导数据融合,得到组合导航处理的轨迹信息,该信息包含了载体的姿态信息(横滚角、俯仰角和航向角)。本次实验使用精度较高的紧组合方式进行数据融合处理。
点击IE中Process选项下的Process TC(Tightly Coupled)就可以进入到紧组合解算界面。在紧组合界面中,需要设置地面车载模式并进行杆臂参数的输入(图21),并需要点击Advanced IMU进行紧组合中惯导误差模型的设定(图22)。惯导误差模型见附录B。
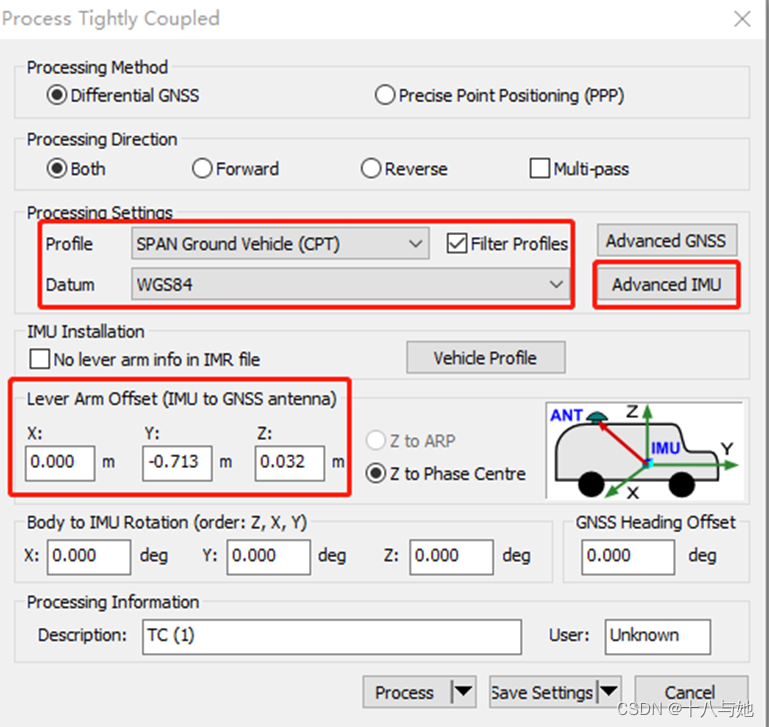
图21 紧组合设置
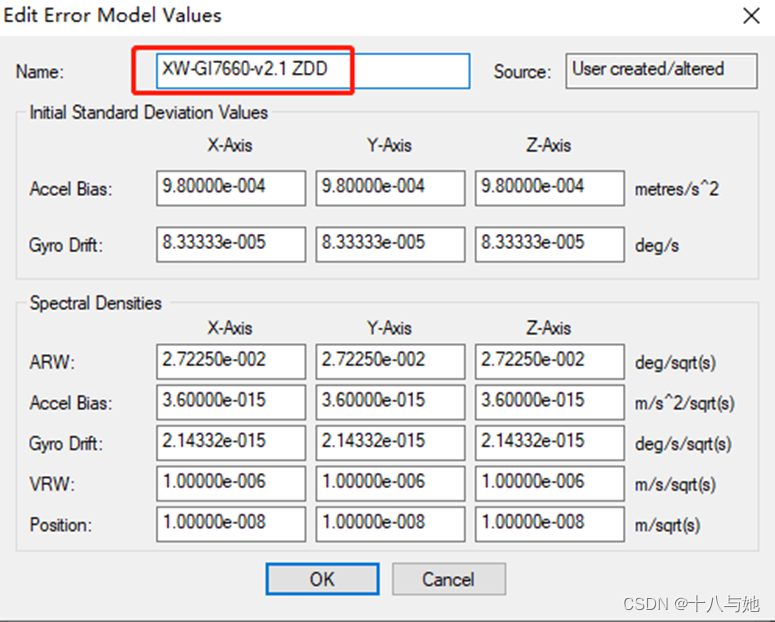
图22 紧组合误差模型设置
设置完成后,就可以点击图21中的process按钮进行紧组合解算,解算过程会实时显示(图23),并经过合并(图24)及平滑过程(图25),得到最终组合导航结果(图26)。
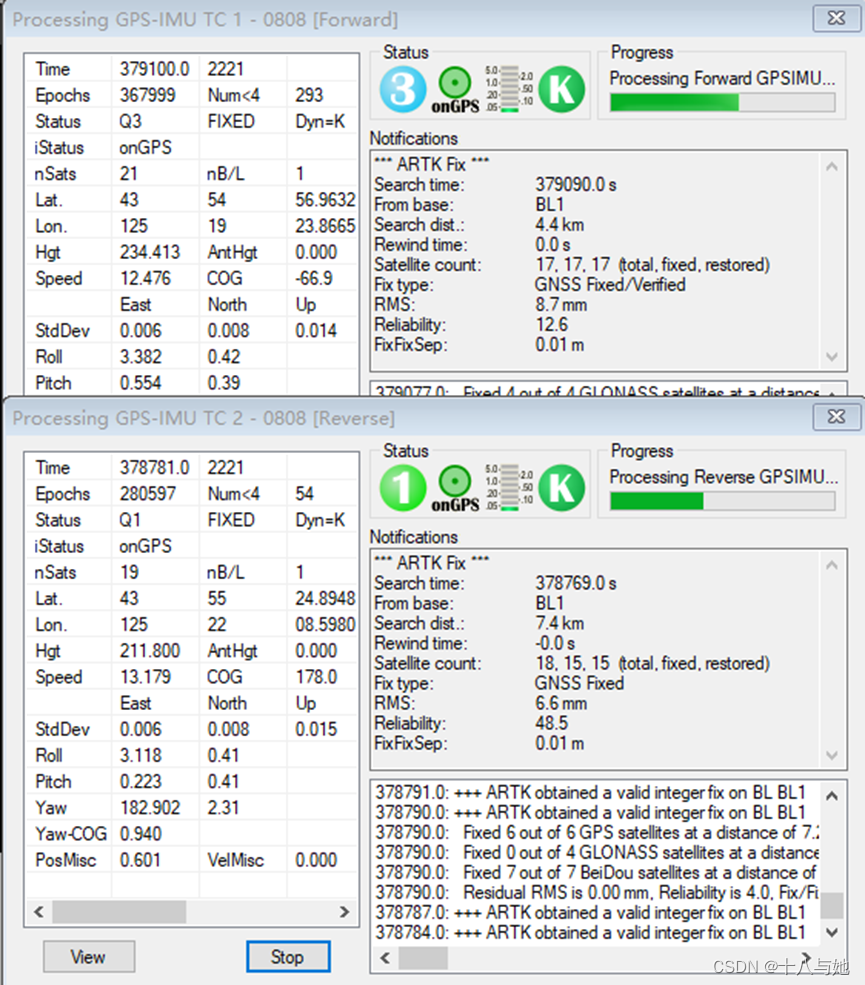
图23 紧组合计算
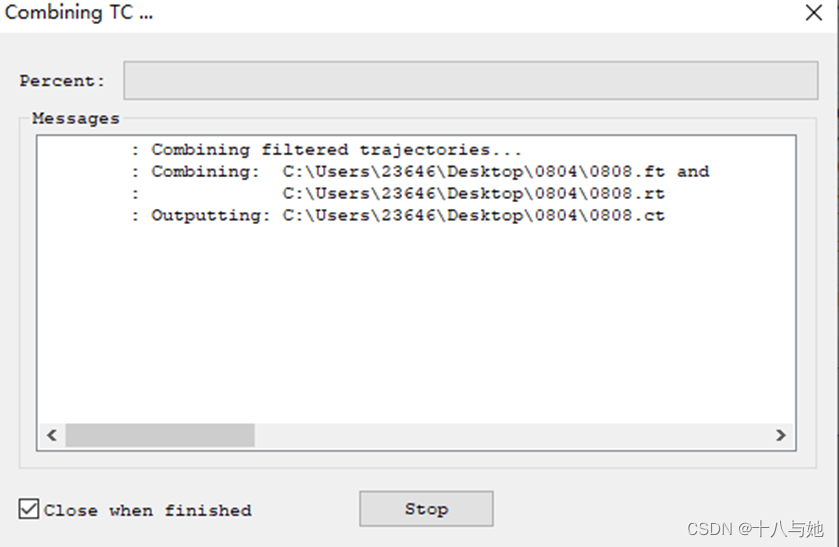
图24 融合轨迹
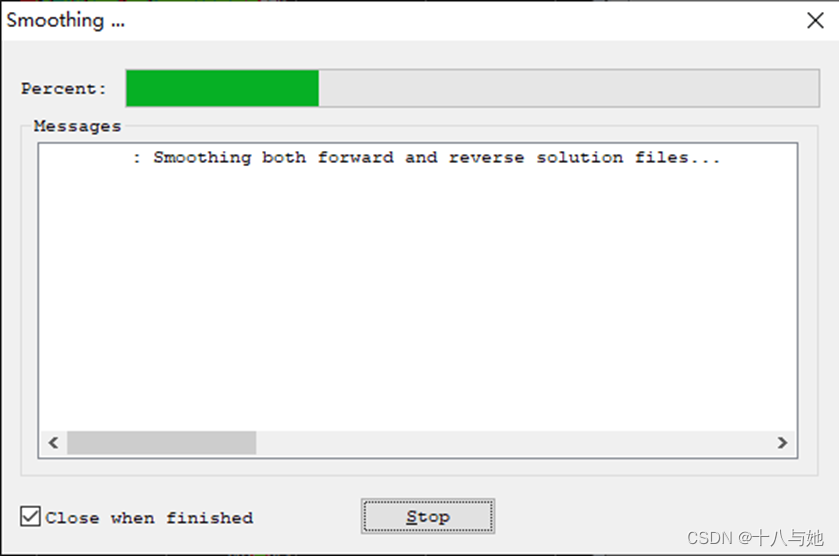
图25 平滑轨迹
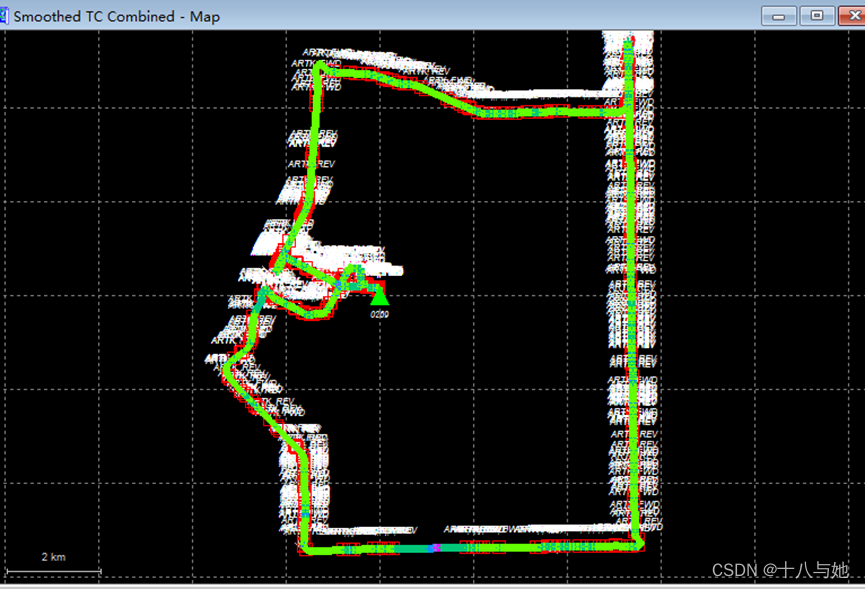
图26 紧组合解算结果处理数据总结
解算质量为1的数量占总数量的80.5%,质量为2的占17.3%,所有轨迹点均成功解算。位置标准差分布情况为,10cm以下的数据点占比97.7%,10-30cm的数据点占比0.9%,不存在误差超过5m的数据点。
结果分析
结果分析由于篇幅原因不再此处介绍,详细内容可参考我上传的资源,里面是完整的报告IE数据后处理报告。
-
相关阅读:
22年多校第三场(F的证明
服务器前后端学习理解
Unity-协同程序原理
SpringBoot实战(二十四)集成 LoadBalancer
数据结构-其他
基于MS16F3211芯片的触摸控制灯的状态变化和亮度控制(11.20)
笛卡尔树(Cartesian Tree)
含文档+PPT+源码等]精品微信小程序spring boot批发零售业商品管理系统[包运行成功]计算机毕设Java毕设项目源码
linux系统zabbix监控配置钉钉告警
计算机毕业设计ssm软件公司的OA系统21k5b系统+程序+源码+lw+远程部署
- 原文地址:https://blog.csdn.net/absll/article/details/126320358