-
SolidWorks模型导入到MATLAB(Simulink-Simscape)详细过程
matlab/simulink中的Simcape模块可进行机械、液压、电气及控制的仿真,而其进行几何模型建极度不方便。利用其与solidworks等CAD软件的接口,可方便的实现刚体运动仿真,效果逼真,各发挥所长。
与Simscape™ Multibody™软件兼容的格式导出SolidWorks ®装配体模型
在您的SolidWorks安装中启用Simscape Multibody Link插件以开始导出您的 CAD 装配体。从机械臂导出示例开始,或阅读有关您可以导出的装配配合以及它们映射到的Simscape Multibody关节和约束块的信息。在继续之前,您必须安装安装Simscape Multibody Link插件Multibody Link插件。
安装Simscape Multibody Link插件
Simscape™ Multibody™ Link是一个插件,您可以将其安装在 CAD 应用程序上,以将装配模型导出到Simscape Multibody。具体来说,该插件将 CAD 装配模型导出为 XML 文件和车身几何文件,您可以使用该功能将其转换为Simscape Multibody模型。
MATLAB ®和 CAD 安装必须具有相同的系统架构,例如 Windows 64 位。
第 1 步:获取安装文件
-
按照下载页面上的提示进行操作。
-
选择并保存与您的 MATLAB 版本和系统架构相匹配的 ZIP 和 MATLAB 文件,例如版本 R2020b 和 Win64 (PC) 平台。不要解压缩 ZIP 文件。
步骤 2:运行安装功能
-
以管理员身份运行 MATLAB。有关详细信息,请参阅如何以管理员身份运行 MATLAB。
-
将保存安装文件的文件夹添加到 MATLAB 路径。例如,您可以使用(MATLAB)函数。addpath
-
在 MATLAB 命令提示符处,输入
install_addon('zipname'),其中zipname是 ZIP 文件的名称,例如smlink.r2020b.win64.zip.
第 3 步:将MATLAB注册为自动化服务器
每次导出 CAD 装配模型时,Simscape Multibody Link插件都会尝试连接到 MATLAB。要启用连接,您必须将 MATLAB 注册为自动化服务器。您可以通过两种方式做到这一点:
-
以管理员模式打开 MATLAB 会话。在 MATLAB 命令提示符处,输入
regmatlabserver. -
打开以管理员模式运行的 Windows ®命令提示符窗口。在命令提示符下,输入
matlab -regserver.
第 4 步:在 CAD 应用程序中启用Simscape Multibody Link插件
在导出 CAD 装配之前,您必须在 CAD 应用程序上启用Simscape Multibody Link插件。为此,请参阅:
从Simscape Multibody Link不支持的应用程序导入 CAD 文件
-
要将 Onshape ® CAD 装配模型导入Simscape Multibody,您可以使用smexportonshape和smimport函数。
-
如果您使用除 Onshape、SolidWorks、PTC Creo 和 Autodesk Inventor 之外的 CAD 应用程序,您可以基于 Simscape Multibody XML 架构创建自定义模型导出应用程序。这种方法需要一些 XML 知识。有关更多信息,请参阅架构网页。
-
您还可以从 URDF 文件或 Robotics System Toolbox™ 模型创建Simscape Multibody模型。有关smimport更多信息,请参阅。
————————————————————————————————
在SolidWorks中启用Simscape Multibody Link插件
Simscape™ Multibody™ Link插件允许您将 SolidWorks® CAD 装配模型导出到Simscape Multibody。要下载并安装插件,请参阅安装 Simscape Multibody Link 插件。
启用插件
要启用插件:
-
在 MATLAB®命令提示符下,输入smlink_linksw.
-
启动 SolidWorks。
-
在 SolidWorks 菜单栏上,单击工具>插件。
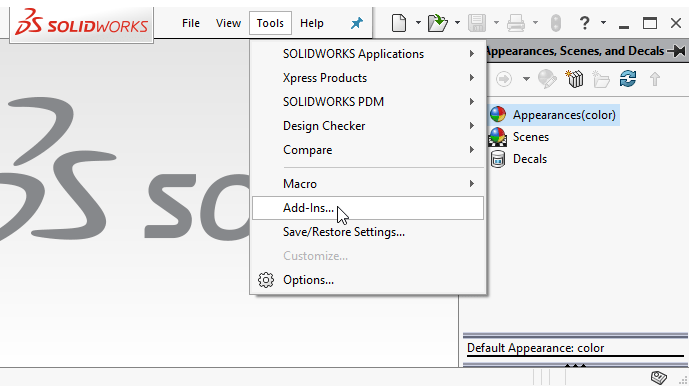
4.在加载项对话框中,选中Simscape Multibody Link复选框。

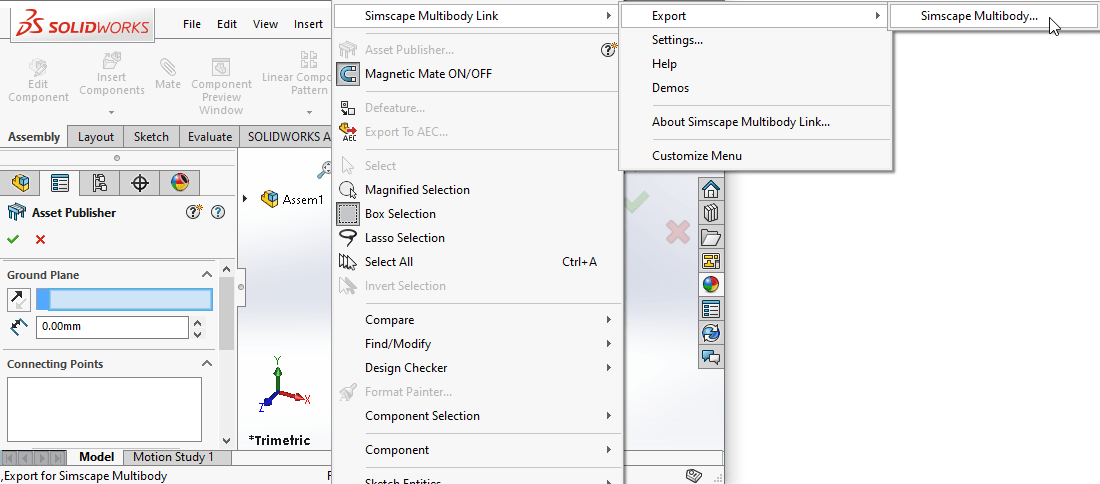
启用插件后,Simscape Multibody Link选项在您启动或打开 SolidWorks 装配体时可用。要导出装配模型,请在菜单栏上单击工具> Simscape Multibody Link >导出> Simscape Multibody。
如果您的计算机有多个 SolidWorks 副本,该
smlink_linksw命令会将Simscape Multibody Link插件添加到所有安装中。但是, 对于要从中导出 CAD 装配模型的每个安装,您必须在插件对话框中选中Simscape Multibody Link复选框。——————————————————————————————————
导出SolidWorks机器人装配体模型
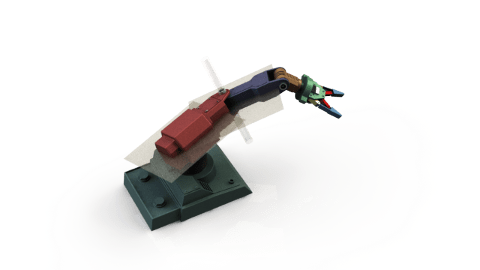
在本例中,您导出一个表示机械臂的 SolidWorks™ CAD 装配体。导出过程会生成一个 XML 文件和一组几何文件,您可以将它们导入Simscape™ Multibody™以生成新模型。
该示例从导出 CAD 装配的过程开始。有关机器人 CAD 文件和 CAD 导出的信息遵循导出程序。要将机器人装配体导入Simscape Multibody模型,请参阅导入机械臂 CAD 模型。
下图显示了您在此示例中导出的机器人 CAD 装配体。

示例要求
要成功完成此示例,您必须满足以下要求:
-
在您的机器上安装最新版本的Simscape Multibody Link。
-
已完成 SolidWorks 安装的链接程序。链接过程将Simscape Multibody Link插件添加到 SolidWorks 安装中。
-
可以访问Simscape Multibody Link安装随附的机器人示例文件。请参阅导出 SolidWorks 机器人装配体模型。
打开装配模型
在您可以输出机器人装配体之前,您必须将装配体加载到 SolidWorks。
-
在您的机器上打开 SolidWorks。
-
选择文件>打开
-
导航到包含机器人 CAD 文件的文件目录。
笔记
包含 SolidWorks 平台的机器人 CAD 文件的目录是
\toolbox\physmod\smlink\smlinkdemos\... - ...solidworks\机器人
-
选择文件
robot.SLDASM。 -
单击打开。
CAD 平台打开机器人装配体。
导出模型
在 SolidWorks 安装中成功打开机器人 CAD 装配体后,您可以以与最新Simscape Multibody技术兼容的格式导出装配体:
-
在 SolidWorks 工具栏上,选择Simscape Multibody 链接>导出> Simscape Multibody。在某些 SolidWorks 版本中,此选项可能出现在 工具菜单下。
-
在“另存为”对话框的“文件名”字段中,输入并选择要导出文件的目录。
sm_robot -
单击保存。
检查导出的文件
确认指定导出目录中存在以下文件:
-
XML 文件 — 提供模型结构和零件参数。
-
几何文件 - 提供零件的表面几何。
关于示例 CAD 文件
CAD 装配文件存在于您的Simscape Multibody Link安装中。您可以访问以下目录中的文件:
\matlab\toolbox\physmod\smlink\smlinkdemos\... - ...solidworks\机器人
将
替换为 MATLAB ®安装的根目录。 在 MATLAB 命令行中输入
matlabroot. MATLAB 返回安装的根目录。该
\robot目录包含一组定义每个 CAD 零件和 CAD 装配的 CAD 文件。零件文件名包含文件扩展名 .SLDPRT。程序集文件名包含扩展名 .SLDASM。扩展名为 .SLDDRW 的工程图文件包含机械臂尺寸。机器人组件包含九个零件和两个组件:robot.SLDASM 和 Grip.SLDASM。文件 robot.SLDASM 对机器人根程序集进行建模。文件夹子。SLDASM 对机器人夹子组件进行建模。
关于 CAD 导出
CAD 导出过程会生成一个 XML 多体描述文件和一组几何文件。XML 文件包含装配的结构和定义每个零件的参数。几何文件定义了每个零件的 3-D 几何。导出过程完成后,您可以将 XML 多体描述文件导入Simscape Multibody软件。Simscape Multibody使用该文件自动生成新的Simscape Multibody模型。
Simscape 多体链接设置
Simscape Multibody Link插件工具提供了一个设置选项。使用选项指定:
-
公差 - 线性、角度和相对
-
要导出的坐标系
要访问设置参数:
-
打开要导出的程序集。
-
在菜单栏中,选择Simscape Multibody Link > Settings。在某些 SolidWorks ®版本中,此选项可能出现在工具菜单下。
设置对话框打开。
对话框
该对话框包含四个窗格:
-
消息— 描述对话框的用途。消息框处于非活动状态。
-
使用解决子装配体 - 确定是将子装配体导出为刚性系统还是柔性系统。
-
装配公差- 指定导出装配的线性、角度和相对公差。
-
导出坐标系 - 确定要导出的坐标系。
求解子装配体使用
选择如何导出 CAD 子装配体。
-
零部件属性- 将刚性子装配视为刚性,将柔性子装配视为柔性。
-
灵活的设置- 将所有子装配体视为灵活的。应用此设置不会影响原始 CAD 装配体。
装配公差
输入 CAD 装配的导出公差。在将 CAD 约束转换为Simscape Multibody关节期间,Simscape Multibody Link将间距、对齐和相对数值误差与导出公差进行比较。

导出坐标系
指定要导出的参考坐标系。参考坐标系独立于零件之间的配合。选项包括:
-
不导出坐标系- 不导出坐标系。
-
仅导出具有此前缀的 CS — 仅导出具有指定名称前缀的坐标系。如果前缀字段为空,Simscape Multibody Link会导出所有参考坐标系。
Mates and Joints
Mates and Entities
在 SolidWorks ®装配体中,您使用配合连接零件。每个配合在不同零件上的配合实体之间应用几何关系。配合包括平行、同心和重合类型。配合实体包括点、线和曲面。
考虑机械臂组件的上臂和前臂部分之间的连接。这种连接允许两个部分围绕单个轴相对于彼此旋转,因此具有一个旋转自由度。您可以通过应用以下配合来指定此自由度:
-
两个零件的圆柱形铰链表面之间有一个同心配合。此配合将关节自由度减少到两个 - 一个平移,沿圆柱轴,一个旋转,围绕同一轴。
-
垂直于圆柱轴的两个平面之间的一个重合配合。该配合消除了两个零件之间的平移自由度。这些现在只能围绕公共铰链轴旋转。
该图显示了 CAD 机械臂组件中的配合表面。
关节和约束
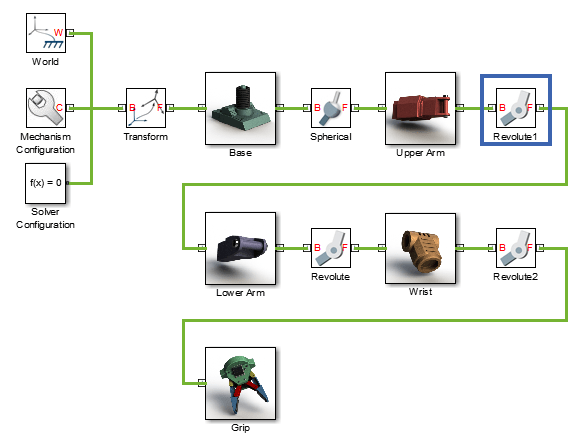
Joint 和 Constraint 块是Simscape Multibody等效于 SolidWorks 配合。它们在两个实体之间应用确定它们如何移动的运动学约束。Revolute Joint 块就是一个例子。该块消除了两个实体之间的五个自由度,只允许它们围绕公共轴旋转。
考虑机械臂组件的上臂和前臂部分之间的连接。这种连接提供了单一的旋转自由度,因此是一个旋转接头。在 CAD 导入期间,两个零件之间的配合转换为两个刚体子系统之间的 Revolute Joint 块。该图显示了导入模型中的这个关节块(为清晰起见进行了抛光)。
其他参考链接:
-
相关阅读:
【springboot】6、Spring Initailiz
【LeetCode力扣】LCR170 使用归并排序的思想解决逆序对问题(详细图解)
springboot基于知识图谱的短视频推荐系统设计与实现毕业设计源码231115
【Java】匿名内部类开发使用场景
MindFusion JavaScript R2 套件 Crack
正则表达式
【JavaWeb】案例 1:记录网站的登录成功人数
php7.3安装phalcon扩展
2022蓝帽杯半决赛
win操作系统切换窗口
- 原文地址:https://blog.csdn.net/weixin_51367832/article/details/126303781