-
【无人机】基于A星算法解决无人机二维路径规划问题含matlab代码
1 内容介绍
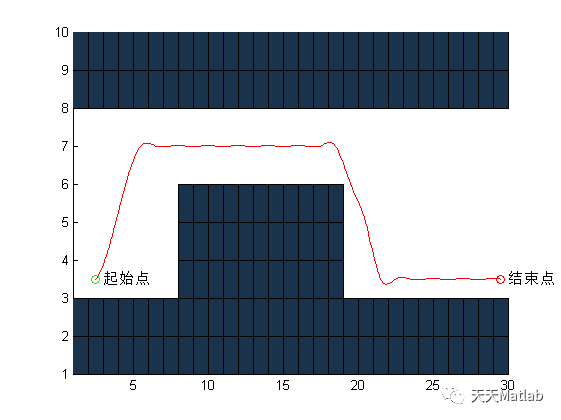
无人机路径规划一直是一个比较热门的话题,A星算法以及其扩展性算法被广范地应用于求解无人机的最优路径.该文在研究无人机路径规划算法中,详细阐述了传统A星算法的基本原理,并通过栅格法分割了机器人路径规划区域,利用MATLAB仿真平台生成了无人机二维路径仿真地图对其进行仿真实验,并对结果进行分析和研究,为今后进一步的研究提供经验.

2 仿真代码
%%%%%%%****Astar算法
clc;
clear all;
close all
MAX_X=30;
MAX_Y=10;
MAX_VAL=20;
MAP=2*(ones(MAX_X,MAX_Y));
%初始化地图
j=0;
x_val = 1;
y_val = 1;
axis([1 MAX_X 1 MAX_Y])
% set(gca,'XTick',0:1:30);
hold on;
%%%%%%%%%%%%%%%%%%%%%%%二维地图生成完毕%%%%%%%%%%%%%
xStart=2;%起始地点
yStart=3;
MAP(xStart,yStart)=1;
plot(xStart+0.5,yStart+0.5,'go');
text(xStart+1,yStart+.5,'起始点')
%设置障碍
for xval=1:30;
for yval=8:10;
MAP(xval,yval)=-1;%
rectangle('Position',[xval,yval,1,1],'facecolor',[0.1,0.2,0.3])
end
end
for xval=1:30;
for yval=1:2;
MAP(xval,yval)=-1;%
rectangle('Position',[xval,yval,1,1],'facecolor',[0.1,0.2,0.3])
end
end
%设置障碍的长度、高度
for xval=8:18;
for yval=3:5;
MAP(xval,yval)=-1;%
rectangle('Position',[xval,yval,1,1],'facecolor',[0.1,0.2,0.3])
end
end
%设定目的坐标
xTarget=29;%
yTarget=3;
plot(xTarget+0.5,yTarget+0.5,'ro');
text(xTarget+1,yTarget+.5,'结束点')
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%开始执行A*算法计算最优化路径%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
OPEN=[];
CLOSED=[];
%载入地图数据
k=1;
for i=1:MAX_X
for j=1:MAX_Y
if(MAP(i,j) == -1)
CLOSED(k,1)=i;
CLOSED(k,2)=j;
k=k+1;
end
end
end
CLOSED_COUNT=size(CLOSED,1);
%设置出发位置
xNode=xStart;
yNode=yStart;
OPEN_COUNT=1;
path_cost=0;
goal_distance=distance(xNode,yNode,xTarget,yTarget);
OPEN(OPEN_COUNT,:)=insert_open(xNode,yNode,xNode,yNode,path_cost,goal_distance,goal_distance);
OPEN(OPEN_COUNT,1)=0;
CLOSED_COUNT=CLOSED_COUNT+1;
CLOSED(CLOSED_COUNT,1)=xNode;
CLOSED(CLOSED_COUNT,2)=yNode;
NoPath=1;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 算法开始计算
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
while((xNode ~= xTarget || yNode ~= yTarget) && NoPath == 1)
exp_array=expand_array(xNode,yNode,path_cost,xTarget,yTarget,CLOSED,MAX_X,MAX_Y);
exp_count=size(exp_array,1);
%更新数据
for i=1:exp_count
flag=0;
for j=1:OPEN_COUNT
if(exp_array(i,1) == OPEN(j,2) && exp_array(i,2) == OPEN(j,3) )
OPEN(j,8)=min(OPEN(j,8),exp_array(i,5));
if OPEN(j,8)== exp_array(i,5)
OPEN(j,4)=xNode;
OPEN(j,5)=yNode;
OPEN(j,6)=exp_array(i,3);
OPEN(j,7)=exp_array(i,4);
end;
flag=1;
end;
end;
if flag == 0
OPEN_COUNT = OPEN_COUNT+1;
OPEN(OPEN_COUNT,:)=insert_open(exp_array(i,1),exp_array(i,2),xNode,yNode,exp_array(i,3),exp_array(i,4),exp_array(i,5));
end;%
end;
index_min_node = min_fn(OPEN,OPEN_COUNT,xTarget,yTarget);
if (index_min_node ~= -1)
xNode=OPEN(index_min_node,2);
yNode=OPEN(index_min_node,3);
path_cost=OPEN(index_min_node,6);%更新路径代价值
CLOSED_COUNT=CLOSED_COUNT+1;
CLOSED(CLOSED_COUNT,1)=xNode;
CLOSED(CLOSED_COUNT,2)=yNode;
OPEN(index_min_node,1)=0;
else
NoPath=0;
end;
end;
%%%%%%输出最优化路径坐标
i=size(CLOSED,1);
Optimal_path=[];
xval=CLOSED(i,1);
yval=CLOSED(i,2);
i=1;
Optimal_path(i,1)=xval;
Optimal_path(i,2)=yval;
i=i+1;
if ( (xval == xTarget) && (yval == yTarget))
inode=0;
parent_x=OPEN(node_index(OPEN,xval,yval),4);
parent_y=OPEN(node_index(OPEN,xval,yval),5);
while( parent_x ~= xStart || parent_y ~= yStart)
Optimal_path(i,1) = parent_x;
Optimal_path(i,2) = parent_y;
inode=node_index(OPEN,parent_x,parent_y);
parent_x=OPEN(inode,4);
parent_y=OPEN(inode,5);
i=i+1;
end;
else
path_cost=1000000;%不存在最优化路径
end
j=size(Optimal_path,1);
Optimal_path(j,1)=xStart;
Optimal_path(j,2)=yStart;
x=Optimal_path(:,1)+0.5;
y=Optimal_path(:,2)+0.5;
for i=2:length(y)-1;
if y(i)>yTarget+0.5;
y(i)=y(i)+0.5;
end
end
xi=Optimal_path(end,1)+0.5:0.1:Optimal_path(1,1)+0.5;
yi=spline(x,y,xi);
plot(xi,yi,'r','LineWidth',1);
3 运行结果
4 参考文献
[1]董箭, 初宏晟, 卢杬樟,等. 基于A星算法的无人机路径规划优化模型研究[J]. 海洋测绘, 2021, 41(3):5.
[2]周宇杭, 王文明, 李泽彬,等. 基于A星算法的移动机器人路径规划应用研究[J]. 电脑知识与技术:学术版, 2020, 16(13):4.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。
-
相关阅读:
mybatisPlus-mapper的注入值得思考
elment-plus图标input上面带的图标为什么不显示
Android插件化学习之初识类加载机制
正则表达式参考手册
14.7 Socket 循环结构体传输
css层叠样式设置
《微信小程序-进阶篇》Lin-ui组件库源码分析-动画组件Transition(三)
文件上传复习(upload-labs14-17关)
cas244193-52-0|[C8MIm]BF4|1-辛基-3-甲基咪唑四氟硼酸盐离子液体分子式:C12H23BF4N2
PKG打包sqlite3项目,如何添加node_sqlite3.node依赖
- 原文地址:https://blog.csdn.net/matlab_dingdang/article/details/126299200