-
PGRouting导航规划-AStar算法

- 推荐数据库DBeaver,可以直接根据几何要素查看图形,相当方便。
1 生成拓扑
要生成最佳路径,首先要生成合法的拓扑。
生成拓扑前,需要添加两个字段,用来存储线段的首尾编号
-- Add "source" and "target" column ALTER TABLE nyc_roads ADD COLUMN "source" integer; ALTER TABLE nyc_roads ADD COLUMN "target" integer;- 1
- 2
- 3
- source —— 用于保存路径起始顶点的id
- target —— 用于保存路径终止顶点的id
调用pgr_createTopology生成拓扑,注意就是生成线段的首位编号的过程
pgr_createTopology( '', -- 需要生成拓扑的表名 float tolerance, -- 容错值 '
' , -- 线段列名 '' ) -- gid- 1
- 2
- 3
- 4
- 5
容错值:例如线段的端不能完全吻合时,允许多少误差,单位一般为角度或公里数
官方说明:https://docs.pgrouting.org/3.1/en/pgr_createTopology.html
例子
-- Run topology function SELECT pgr_createTopology('nyc_roads', 0.00001, 'geom', 'gid');- 1
- 2
或者:
创建路网拓扑需要调用pgr_createTopology数:
SELECT pgr_createTopology( 'aaa_bbb', 0.001, 'geom', 'gid', 'source', 'target' );- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
上面的六个参数分别表示:
- 路网表
- 路径之间的容差,两条路径的距离大于这个容差值,就表示它们不相交,否则就是相交。
- 路网表中包含空间信息的列
- 路网表的主码列
- 保存路径起始顶点的id的列
- 保存路径终止顶点的id的列
拓扑路径创建完成后,数据库中会自动多出一张表aaa_bbb_vertices_pgr

这张表保存了路径的起始、终止顶点数据

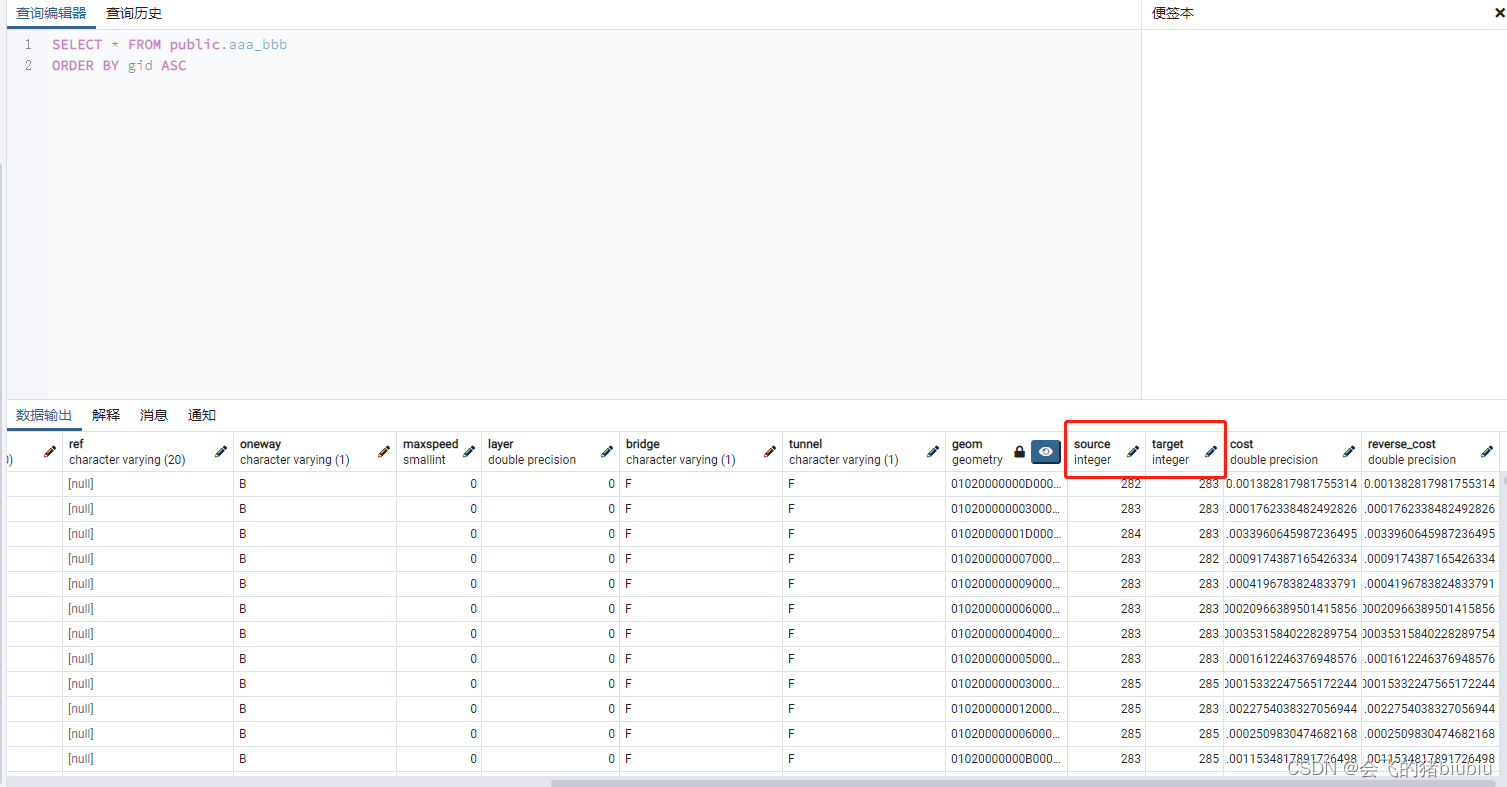
我们再查询路网表aaa_bbb,可以发现source列和target列都被填满了,值就是aaa_bbb_vertices_pgr这张表中对应的的id值
2 生成最佳路径
pgrouting支持的最佳路径算法很多。
官方说明:[https://docs.pgrouting.org/3.1/en/search.html?q=+shortest+path&check_keywords=yes&area=default](https://docs.pgrouting.org/3.1/en/search.html?q= shortest path&check_keywords=yes&area=default)
这里以Shortest Path A*和Shortest Path Dijkstra(狄克斯特拉)为例,介绍如何生成最佳路径如果考虑回程成本的话,需要增加回程成本的字段,并设置为公里数。
ALTER TABLE nyc_roads ADD COLUMN reverse_cost double precision; UPDATE nyc_roadsSET reverse_cost = length;- 1
- 2
- cost —— 用于保存路径正向的成本(或者代价)
- reverse_cost —— 用于保存路径反向的成本(或者代价)
ALTER TABLE nyc_roads ADD COLUMN cost DOUBLE PRECISION, ADD COLUMN reverse_cost DOUBLE PRECISION;- 1
- 2
- 3
OSM数据包含一个oneway列,它的值可能是以下三个值之一:
- ‘F’ —— 表示该路径是单向的,且路径方向是正向的。
- ‘T’ —— 表示该路径是单向的,且路径方向是反向的。
- ‘B’ —— 表示该路径是双向的。
现在就根据路径的方向来计算各个路径的成本。
将路径的长度作为成本,如果路径是正向的,则cost值为路径的长度,reverse_cost值为-1;如果路径是反向的,则reverse_cost值为路径的长度,cost值为-1;如果路径是双向的,则cost和reverse_cost的值都为路径的长度。
①正向路径的成本:
UPDATE aaa_bbb SET cost = ST_Length(geom), reverse_cost = -1 WHERE oneway = 'F';- 1
- 2
- 3
②反向路径的成本:
UPDATE aaa_bbb SET reverse_cost = ST_Length(geom), cost = -1 WHERE oneway = 'T';- 1
- 2
- 3
③双向路径的成本:
UPDATE aaa_bbb SET cost = ST_Length(geom), reverse_cost = ST_Length(geom) WHERE oneway = 'B';- 1
- 2
- 3
2.1 Shortest Path Dijkstra算法举例
Dijkstra算法是第一个在pgRouting中实现的算法。它不需要除id、source、target和cost之外的其他属性。而且可以明确指定将图视为有向的或无向的。
pgr_dijkstra函数的签名摘要

函数说明:
pgr_dijkstra( text sql, -- 用于计算最佳路径的数据来源, 用SQL表示, 例如 -- SELECT id (gid), source (线段起点id), target (线段重点ID), cost (起点到终点的成本) [,reverse_cost (终点到起点的成本)] FROM edge_table integer source, -- 规划路径的起点 integer target, -- 规划路径的终点 boolean directed -- 是否支持双向,如果为true,sql中必须有reverse_cost );- 1
- 2
- 3
- 4
- 5
- 6
- 7
官方说明:https://docs.pgrouting.org/3.1/en/pgr_dijkstra.html
返回结果:(seq, path_seq ,node, edge, cost, agg_cost)
node:起点id
edge:目标ID, -1表示终点
SELECT * from public.pgr_dijkstra( 'SELECT gid AS id, source::integer, target::integer, length::double precision AS cost, reverse_cost FROM nyc_roads', 1, 9, false )- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12

注意:
- 许多pgRouting函数都将sql :: text作为参数之一,虽然这开始看起来很混乱,但它使函数非常灵活。用户可以传递任何SELECT语句作为函数参数,只要该SELECT语句返回的结果包含所需数量的属性且包含正确的属性名。
- 多数pgRouting实现的算法不需要路网几何信息。
- 大多数pgRouting函数不返回几何信息,而只返回包含节点id或路径id的有序列表。
2.2 Shortest Path A*算法举例
与Shortest Path Dijkstra算法类似,只是SQL需要用到每条线段的起点和终点的坐标,其他参数和pgr_dijkstra都一样。
ALTER TABLE nyc_roads ADD COLUMN x1 double precision; ALTER TABLE nyc_roads ADD COLUMN y1 double precision; ALTER TABLE nyc_roads ADD COLUMN x2 double precision; ALTER TABLE nyc_roads ADD COLUMN y2 double precision; UPDATE nyc_roads SET x1 = ST_x(ST_PointN(geom, 1)); -- 线段起点坐标x UPDATE nyc_roads SET y1 = ST_y(ST_PointN(geom, 1)); -- 线段起点坐标y UPDATE nyc_roads SET x2 = ST_x(ST_PointN(geom, ST_NumPoints(geom))); -- 线段终点坐标x UPDATE nyc_roads SET y2 = ST_y(ST_PointN(geom, ST_NumPoints(geom))); -- 线段终点坐标y- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
可能出现x1,y1,x2,y2没赋值成功,通过函数进行逐个分析,有可能存入的数据格式不对,通过PostGIS函数进行转换下就好:
UPDATE "Road" SET x1 = ST_x(st_pointn(st_geometryn(transform_geom, 1), 1)); -- 线段起点坐标x UPDATE "Road" SET y1 = ST_y(st_pointn(st_geometryn(transform_geom, 1), 1)); -- 线段起点坐标y UPDATE "Road" SET x2 = ST_x(ST_PointN(st_geometryn(transform_geom, 1), ST_NumPoints(st_geometryn(transform_geom, 1)))); -- 线段终点坐标x UPDATE "Road" SET y2 = ST_y(ST_PointN(st_geometryn(transform_geom, 1), ST_NumPoints(st_geometryn(transform_geom, 1)))); -- 线段终点坐标y- 1
- 2
- 3
- 4
- 5
函数说明:
pgr_astar( sql text, -- SELECT id, source, target, cost, x1, y1, x2, y2 [,reverse_cost] FROM edge_table ,包含了起点和重点坐标,计算速度比Shortest Path Dijkstra算法快一点 source integer, target integer, directed boolean, has_rcost boolean );- 1
- 2
- 3
- 4
- 5
- 6
- 7
官方说明:https://docs.pgrouting.org/3.1/en/pgr_aStar.html
返回结果与pgr_dijkstra一样
例子:
SELECT * FROM pgr_astar(' SELECT gid AS id, source::integer, target::integer, length::double precision AS cost, x1, y1, x2, y2 FROM nyc_roads', 1, 9, false);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
结果:

以上的node列表示会经过的顶点,edge列表示会经过的路径,cost表示对应单条路径的成本,agg_cost表示路径的总成本。
注意:
- 返回的cost属性表示edges_sql参数中指定的cost属性。在这个例子中,cost是路径的长度。cost可以是时间、距离或任何其他属性以及自定义公式的组合。
- 结果中的node属性和edge属性取决于使用pgr_createTopology函数时对顶点标识符的分配。
3 查询的标识符
source列和target列的顶点标识符(对应shenzhen_roads_vertices_pgr的id值)的分配可能不同,因为pgr_createTopology函数随机分配顶点标识符。所以每次运行pgr_createTopology函数建立路网拓扑,source列和target列的顶点标识符都是不同的。(因此仅以文章中的内容作为参考,然后使用你自己的数据进行测试)。
选取两个点
select * from aaa_bbb_vertices_pgr- 1
点1 id为1521

点2 id为1516

SELECT * FROM pgr_dijkstra( 'SELECT gid AS id, source, target, cost, reverse_cost FROM aaa_bbb', 1521, 1516, directed := FALSE );- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8

4 效果呈现
4.1 pgr_dijkstra
select * from ( SELECT * FROM pgr_dijkstra( 'SELECT gid AS id, source, target, cost, reverse_cost FROM aaa_bbb', 1521, 1516, directed := FALSE ))t1 left join aaa_bbb_vertices_pgr t2 on t1.node = t2.id- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9

4.2 pgr_astar
select * from ( SELECT * FROM pgr_astar(' SELECT id, source::integer, target::integer, length::double precision AS cost, x1, y1, x2, y2 FROM "Road"', 2, 9, false))t1 left join "Road_vertices_pgr" t2 on t1.node = t2.id- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
5 参考链接
- POSTGIS路径规划的简单配置(代码编写)_简单GIS的博客-CSDN博客_gis路径规划
- PgRouting求解大数据量最短路径_言成言成啊的博客-CSDN博客_pgrouting
- (四)pgRouting最短路径查询_会飞的猪biubiu的博客-CSDN博客_pgr_dijkstra
- 相关阅读:
信号量临界区保护
轻松了解JVM
复制粘贴(二):操作剪贴板 navigator.clipboard
this.$emit使用方法【前端技术】
搜维尔科技:北京中医药大学在学习针灸之前使用AcuMap实操人体解剖学的案例研究
GD32F4xx GCC编译
Nvidia GPU 入门教程之 04 如何在 Ubunt 上安装 Anaconda Python 发行版
SOME/IP TTL 在各种Entry 中各是什么意思?有什么限制?
注意力机制
Git命令日常总结
- 原文地址:https://blog.csdn.net/An1090239782/article/details/126265172