-
机器学习8—聚类算法之DBSCAN和Birch算法
一、基于密度的聚类DBSCAN算法
DBSCAN(Density-Based Spatial Clustering of Applications with Noise,具有噪声的基于密度的聚类方法)是一种基于密度的空间聚类算法。 该算法将具有足够密度的区域划分为簇,并在具有噪声的空间数据库中发现任意形状的簇,它将簇定义为密度相连的点的最大集合。
动画讲解DBSCAN算法的国外网站:https://www.naftaliharris.com/blog/visualizing-dbscan-clustering/
1.1DBSCAN算法的基本概念
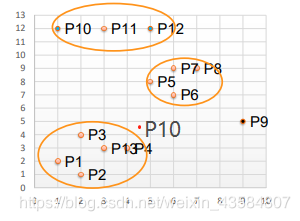
1.取半径为3,MinPts为3(圆圈能够圈住的最小的数目),则可以得到如下的分类结果,其中,P9为噪音点,P10为噪音点。
-
MinPts:这个参数就是圆能够圈住的点的个数,也相当于是一个密度,一般这个值都是偏小一些,然后进行多次尝试
-
(1)Eps邻域:给定对象半径Eps内的邻域称为该对象的Eps邻域。
-
(2)核心点(core point):如果对象的Eps邻域至少包含最小数目MinPts的对象,则称该对象为核心对象。
-
(3)边界点(edge point):边界点不是核心点,但落在某个核心点的邻域内。
-
(4)噪音点(outlier point):既不是核心点,也不是边界点的任何点。6,
-
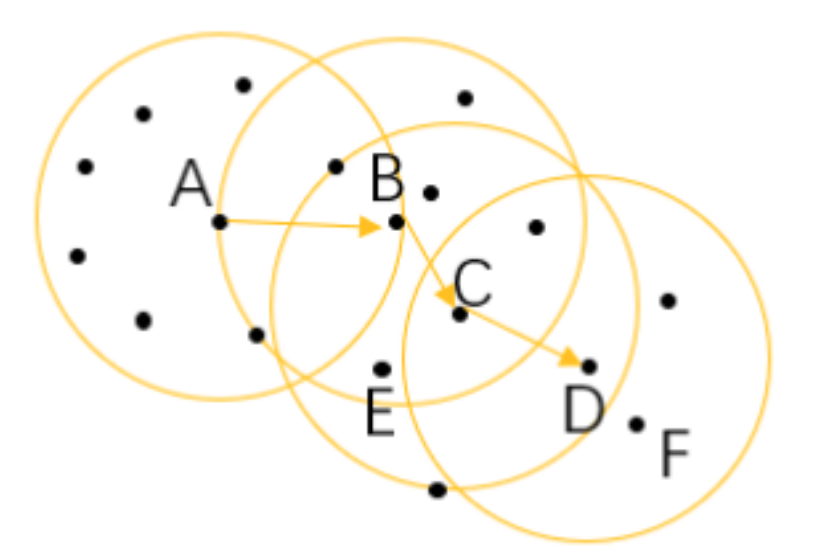
我们假设最小样本容量为6,A、B、C为核心对象:
-
(5) 直接密度可达:给定一个对象集合D,如果p在q的Eps邻域内,而q是一个核心对象,则称对象p从对象q出发时是直接密度可达的,比如 上图中的 A 和 B 、B 和 C 等。
-
(6)密度可达: 如果有一系列的点,都满足上一个点到这个点是密度直达,那么这个系列中不相邻的点就称为密度可达,比如 A 和 D。
-
(7)密度相连: 如果存在对象O∈D,使对象p和q都是从O关于Eps和MinPts密度可达的,那么对象p到q是关于Eps和MinPts密度相连的,比如这 里的 E 和 F 点就是密度相连。
1.2DBSCAN算法参数选择
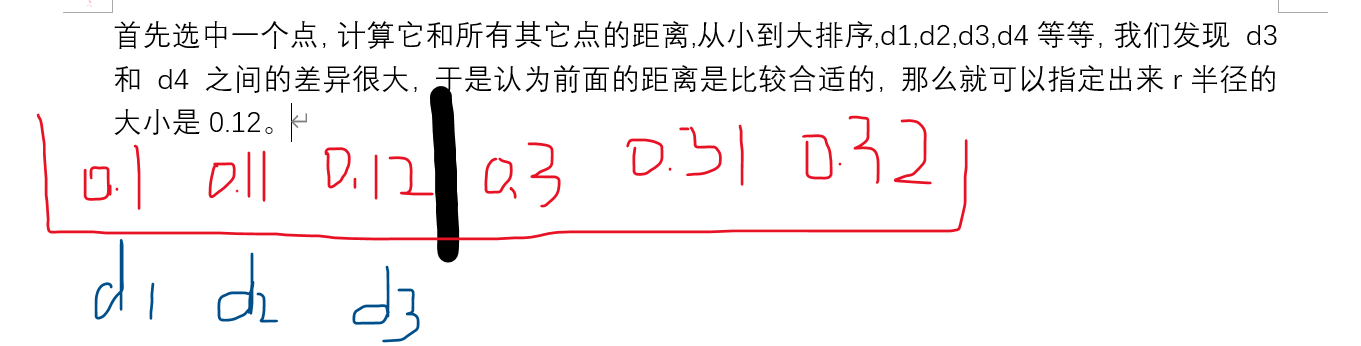
半径: 半径是最难指定的 ,大了,圈住的点就多了,簇的个数就少了;反之,圈住的点少了,簇的个数就多了,这对我们最后的结果是有影响的。我们这个时候K距离可以帮助我们来设定半径r,也就是要找到突变点,比如:
1.3DBSCAN算法原理
- (1)DBSCAN通过检查数据集中每点的Eps邻域来搜索簇,如果点p的Eps邻域包含的点多于MinPts个,则创建一个以p为核心对象的簇;
- (2)然后,DBSCAN迭代地聚集从这些核心对象直接密度可达的对象,这个过程可能涉及一些密度可达簇的合并;
- (3)当没有新的点添加到任何簇时,该过程结束。
DBSCAN 算法的簇里面可以有一个或者多个核心点。如果只有一个核心点,则簇里其他的非核心点样本都在这个核心点的 Eps 邻域里。如果有多个核心点,则簇里的任意一个核心点的 Eps 邻域中一定有一个其他的核心点,否则这两个核心点无法密度可达。这些核心点的 Eps 邻域里所有的样本的集合组成一个 DBSCAN 聚类簇。
DBSCAN算法的描述如下。
输入:数据集,邻域半径 Eps,邻域中数据对象数目阈值 MinPts;
输出:密度联通簇。
处理流程如下。- 1)从数据集中任意选取一个数据对象点 p;
- 2)如果对于参数 Eps 和 MinPts,所选取的数据对象点 p 为核心点,则找出所有从 p 密度可达的数据对象点,形成一个簇;
- 3)如果选取的数据对象点 p 是边缘点,选取另一个数据对象点;
- 4)重复(2)、(3)步,直到所有点被处理。
DBSCAN 算法的计算复杂的度为 O(n²),n 为数据对象的数目。这种算法对于输入参数 Eps 和 MinPts 是敏感的。
1.4DBSCAN算法中dbscan()函数的说明
dbscan(X, eps=0.5, *, min_samples=5, metric='minkowski', metric_params=None, algorithm='auto', leaf_size=30, p=2, sample_weight=None, n_jobs=None)- 1
- 2
- 3
参数说明:
-
eps : float, optional
两个样本之间的最大距离,一个被认为是另一个样本的邻域。这不是群集中点的距离的最大界限。这是为您的数据集和距离函数选择适当的最重要的DBSCAN参数。 -
min_samples : int,可选
对于要被视为核心对象的点,邻域中的样本数(或总权重)。这包括点本身。 -
metric:最近邻距离度量参数。默认的欧式距离(即p=2的闵可夫斯基距离),可以使用的距离度量参数有:欧式距离 “euclidean”,曼哈顿距离 “manhattan”,切比雪夫距离“chebyshev”,闵可夫斯基距离 “minkowski”,带权重闵可夫斯基距离 “wminkowski”,标准化欧式距离 “seuclidean”,马氏距离“mahalanobis”。
-
metric_params : dict, optional
度量函数的其他关键字参数。 -
algorithm:{‘auto’,‘ball_tree’,‘kd_tree’,‘brute’},可选
NearestNeighbors模块用于计算逐点距离并找到最近邻居的算法。有关详细信息,请参阅NearestNeighbors模块文档。 -
leaf_size : int,optional(默认值= 30)
叶子大小传递给BallTree或cKDTree。这可能会影响构造和查询的速度,以及存储树所需的内存。最佳值取决于问题的性质。 -
p : float,可选
正确译法:用于计算点之间距离的Minkowski矩阵的幂。 -
n_jobs : int或None,可选(默认=无)
要运行的并行作业数。 None除非在joblib.parallel_backend上下文中,否则表示1 。 -1表示使用所有处理器。
1.5DBSCAN算法的实现
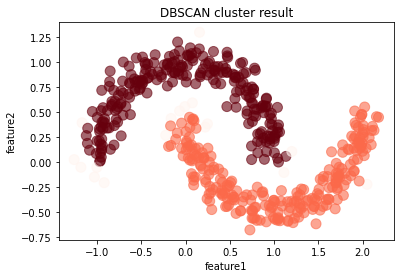
import numpy as np import pandas as pd from sklearn import datasets from sklearn.cluster import dbscan # make_moons 这个方法是生成两个交错的半圆环 data,_ = datasets.make_moons(500,noise = 0.1,random_state=1) # 创建数据集 # print('数据集0,1', data) df = pd.DataFrame(data,columns = ['feature1','feature2']) # 将数据集转换为dataframe # 可视化处理 # 绘制样本点,s为样本点大小,aplha为透明度,设置图形名称 # 看下面第1个图 df.plot.scatter('feature1','feature2', s = 100,alpha = 0.6, title = 'dataset by make_moon') # DBSCAN算法 core_samples,cluster_ids = dbscan(data, eps = 0.2, min_samples=20) # eps为邻域半径,min_samples为最少点数目 # cluster_id=k,k为非负整数时,表示对应的点属于第k簇,k为簇的编号,当k=-1时,表示对应的点为噪音点 # print('标签', cluster_ids) # np.c_用于合并按行两个矩阵 #(要求两个矩阵行数相等,这里表示将样本数据特征与对应的簇编号连接) df = pd.DataFrame(np.c_[data,cluster_ids],columns = ['feature1','feature2','cluster_id']) # print('两个矩阵合并后的DataFrame', df) # astype函数用于将pandas对象强制转换类型,这里将浮点数转换为整数类型 df['cluster_id'] = df['cluster_id'].astype('int') # 绘图,c = list(df['cluster_id'])表示样本点颜色按其簇的编号绘制 # cmap=rainbow_r表示颜色从绿到黄 # colorbar = False表示删去显示色阶的颜色栏 # 看下面第2个图 df.plot.scatter('feature1','feature2', s = 100, c = list(df['cluster_id']),cmap = 'Reds',colorbar = False, alpha = 0.6,title = 'DBSCAN cluster result') plt.show()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
图1:未运用DBSCAN算法进行处理的数据散点图
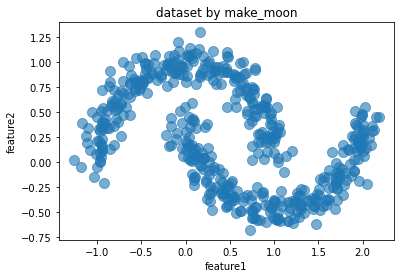
图2:运用DBSCAN算法进行处理的数据散点图
二、基于层次的聚类Birch算法
Birch聚类算法称为平衡迭代归约及聚类算法,它是一种常用的层次聚类算法。该算法通过聚类特征(Clustering Feature,CF)和聚类特征树(Clustering Feature Tree,CFT)两个概念描述聚类。聚类特征树用来概括聚类的有用信息,由于其占用空间小并且可以存放在内存中,从而提高了算法的聚类速度,产生了较高的聚类质量,并适用于大型数据集。层次聚类算法是讲数据样本组成一颗聚类树,根据层次分解是以自顶向下(分裂)还是自底向上(合并)方式进一步合并或分裂。
2.1Birch算法描述
Birch聚类算法具有能处理的数据规模大、算法效率高、更容易计算类簇的直径和类簇之间的距离等优点。
Birch聚类算法的聚类特征(CF)通过三元组结构描述了聚类类簇的基本信息,
三元结构公式为:
上述中N表示聚类数据点的个数,每个点用一个d维向量表示;
 表示N个聚类数据点的线性和;SS表示N个聚类数据点的平方和。聚类特征通过线性和表示聚类的质心,通过平方和表示聚类的直径大小。
表示N个聚类数据点的线性和;SS表示N个聚类数据点的平方和。聚类特征通过线性和表示聚类的质心,通过平方和表示聚类的直径大小。Birch算法主要包括以下三个阶段:
- 定初始阈值z并扫描整个数据集D,再根据该阈值建立一棵聚类特征树T。
- 通过提升阈值z重建该聚类特征树T,从而得到一棵压缩的CF树。
- 利用全局性聚类算法对CF树进行聚类,改进聚类质量以得到更好的聚类结果。
2.2Birch()函数使用
- 在Sklearn机器学习包中,调用cluster聚类子库的Birch()函数即可进行Birch聚类运算,该算法要求输入聚类类簇数。Birch类构造方法如下:
Birch(branching_factor=50, compute_labels=True, copy=True, n_clusters=3, threshold=0.5)- 1
- 2
参数说明:
- branches_factor:每个节点中CF子集群的最大数量,默认为50。
- n_clusters :聚类的目标个数(可选)。最重要的参数n_clusters=3表示该聚类类簇数为3,即聚集成3堆。
- threshold :扫描半径(个人理解,官方说法比较绕口),设置小了分类就多。
- compute_labels布尔:默认值 =True,是否计算每个拟合的标签。
- copy:默认值 = Ture
是否创建给定数据的副本。如果设置为 False,则初始数据将被覆盖。
- 下面举个简单的实例,使用前面的例子中的6个点进行,设置聚类类簇数为2(n_clusters=2),调用Birch()函数聚类,通过clf.fit()装载数据训练模型。
from sklearn.cluster import Birch X = [[1,1],[2,1],[1,3],[6,6],[8,5],[7,8]] y = [0,0,0,1,1,1] clf = Birch(n_clusters=2) # 聚类模型 clf.fit(X,y) # 训练 print(clf.labels_) # 聚类后的类标 , 从0开始的数字- 1
- 2
- 3
- 4
- 5
- 6
输出为:
[1 1 1 0 0 0]- 1
clf.labels_表示输出聚类后的类标。由于聚类类簇设置为2,故类标为0或1,其中X[1,1]、X[2,1]、X[1,3]聚类后属于1类,X[6,6]、X[8,5]、X[7,8]聚类后属于0类。
2.3Brich算法的使用
氧化物数据下载:http://archive.ics.uci.edu/ml/machine-learning-databases/glass/
其中数据集共包含9个特征变量,分别为ri、na、mg、al、si、k、ca、ba、fe,1个类别变量glass_type,共有214个样本。其中类别变量glass_type包括7个值,分别是:1 表示浮动处理的窗口类型、2表示非浮动处理的窗口类型、3表示浮动处理的加工窗口类型、4表示非浮动处理的加工窗口类型(该类型在该数据集中不存在)、5表示集装箱类型、6表示餐具类型、7表示头灯类型。- 散点图的简单实现
import pandas as pd import matplotlib.pyplot as plt glass = pd.read_csv("glass1.csv") # 读取glass1.csv文件 # 不同类别glass_type绘制为不同颜色的点(共7个类别) plt.scatter(glass.al, glass.ri, c=glass.glass_type) plt.xlabel('al') plt.ylabel('ri') plt.show()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
散点图为:
- Brich算法的实现
主要步骤为: - 调用Pandas扩展包的read_csv导入玻璃数据集,注意获取两列数据,需要转换为二维数组X。
- 从sklearn.cluster包中导入Birch()聚类函数,并设置聚类类簇数。 调用clf.fit(X, y)函数训练模型。
- 用训练得到的模型进行预测分析,调用predict()函数预测数据集。 分别获取三类数据集对应类的点。
- 调用plot()函数绘制散点图,不同类别的数据集设置为不同样式。
代码为:
import pandas as pd import matplotlib.pyplot as plt from sklearn.cluster import Birch # 数据获取 glass=pd.read_csv("glass1.csv") X1 = glass.al # 获取第五列数据 X2 = glass.ri # 获取第二列数据 T = dict(zip(X1,X2)) # 生成二维数组 X = list(map(lambda x,y: (x,y), T.keys(),T.values())) # dict类型转换为list y = glass.glass_type # 获取第11列数据 # 聚类 clf = Birch(n_clusters=3)# n_clusters=3表示该聚类类簇数为3,即聚集成3堆 clf.fit(X, y) # 训练 y_pred = clf.predict(X) # 预测 print('预测结果=', y_pred) # 分别获取不同类别数据点 x1, y1 = [], [] x2, y2 = [], [] x3, y3 = [], [] # 分布获取类标为0、1、2的数据并赋值给(x1,y1) (x2,y2) (x3,y3) i = 0 while i < len(X): if y_pred[i]==0: x1.append(X[i][0]) y1.append(X[i][1]) elif y_pred[i]==1: x2.append(X[i][0]) y2.append(X[i][1]) elif y_pred[i]==2: x3.append(X[i][0]) y3.append(X[i][1]) i = i + 1 # 三种颜色 红 绿 蓝,marker='x'表示类型,o表示圆点 *表示星型 x表示点 plot1, = plt.plot(x1, y1, 'or', marker="x") plot2, = plt.plot(x2, y2, 'og', marker="o") plot3, = plt.plot(x3, y3, 'ob', marker="*") plt.xlabel('al') plt.ylabel('ri') plt.show()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
输出为:
预测结果= [2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 2 0 2 2 2 2 2 2 2 2 2 2 2 0 2 2 0 2 0 0 0 2 2 2 0 2 2 0 2 2 2 2 2 1 1 2 1 2 2 1 2 2 2 2 2 2 0 0 1 1 2 0 0 0 0 2 2 2 2 2 2 2 2 2 2 0 2 0 2 1 2 2 2 1 1 1 2 1 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 2 2 1 1 1 1]- 1
- 2
- 3
- 4
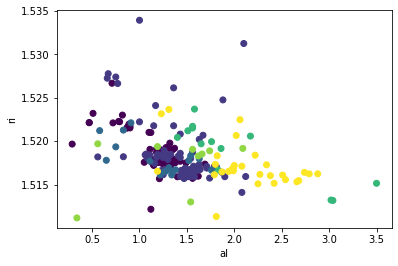
散点图:
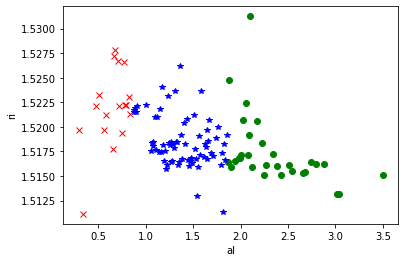
从图中可以看到,右下角红色x形点聚集在一起,其al含量较高、ri含量较低;中间绿色o点聚集在一起,其al、ri含量均匀;右部蓝色*星形点聚集在一起,其al含量较低、ri含量较高。可以看出Birch算法将数据集划分为三部分。
总结
DBSCAN算法优缺点
优点
- 1)不需要划分个数。 跟 K-means 比起来,DBSCAN 不需要人为地制定划分的类别个数,而可以通 过计算过程自动分出。
- 2)可以处理噪声点。 经过 DBSCAN 的计算,那些距离较远的数据不会被记入到任何一个簇中,从而成为噪声点,这个特色也可以用来寻找异常点。
- 3)可以处理任意形状的空间聚类问题。 从我们的例子就可以看出来,与 K-means不同,DBSCAN 可以处理各种奇怪的形状,只要这些数据够稠密就可以了。
缺点
- 1)需要指定最小样本量和半径两个参数。 这对于开发人员极其困难,要对数据非常了解并进行很好的数据分析。而且根据整个算法的过程可以看出,DBSCAN 对这两个参数十分敏感,如果这两个参数设定得不准确,最终的效果也会受到很大的影响。
- 2)数据量大时开销也很大。在计算过程中,需要对每个簇的关系进行管理。所以当数据量大的话, 内存的消耗也非常严重。
- 3)如果样本集的密度不均匀、聚类间距差相差很大时,聚类质量较差。
Birch算法优缺点
优点
- 1)节约内存,所有的样本都在磁盘上,CF Tree仅仅存了CF节点和对应的指针。
- 2)聚类速度快,只需要一遍扫描训练集就可以建立CFTree,CF Tree的增删改都很快。
- 3)可以识别噪音点,还可以对数据集进行初步分类的预处理 。
- 4)可以不用输入类别数K值。如果不输入K值,则最后的CF元组的组数即为最终的K,否则会按照输入的K值对CF元组按距离大小进行合并。
缺点
- 1)由于CFTree对每个节点的CF个数有限制,导致聚类的结果可能和真实的类别分布不同,一个CF数节点并不总是对应于用户所考虑的一个自然簇 。
- 2)对高维特征的数据聚类效果不好。此时可以选择Mini Batch K-Means 。
- 3)因为其使用半径或者直径的概念来定义簇的边界,所以如果数据集的分布簇不是类似于超球体,或者说不是凸的,则聚类效果不好。
- 4)BIirch适合于处理需要数十上百小时聚类的数据,但在整个过程中算法一旦中断,一切必须从头再来。
-
-
相关阅读:
硬盘对拷(硬盘复制)操作指南
C#语言:散修笔记
qt_standard_project_setup
动态壁纸软件iWall mac中文特色
算法---重复的子字符串
ChatGPT AIGC总结Excel中Vlookup,lookup,xlookup的区别
探索技术之上科技伦理,阿里巴巴成立科技伦理治理委员会
Python 全栈系列195 Neo4j 4.4 Docker安装
decapoda-research/llama-7b-hf 的踩坑记录
vs2015 AdminDeployment.xml
- 原文地址:https://blog.csdn.net/ex_6450/article/details/126244802
