-
机器人控制器编程实践指导书旧版-实践一 LED灯(数字量)
适用于UNO/2560/DUE/ESP8266/ESP32,2021年之前使用版本。

实践一 LED灯(数字量)
1.1 实践目的
- 了解机器人控制器的基本概念和特点
- 了解Arduino[ESP32]简介及相应的硬件设备
- 掌握Arduino[ESP32] IDE的安装和使用
- 掌握Arduino[ESP32]硬件基本资源和编程方法
1.2 实践设备
- PC机一台
- Arduino[ESP32]开发板及配件等
- 万用表和示波器等
1.3 实践原理
- 初级:
1.3.1 控制13引脚灯闪烁。


示意图和原理图
参考代码:
int led = 13; // integer variable led is declared
void setup() { // the setup() method is executed only once
pinMode(led, OUTPUT); // the led PIN is declared as digital output
}
void loop() { // the loop() method is repeated
digitalWrite(led, HIGH); // switching on the led
delay(1000); // stopping the program for 1000 milliseconds
digitalWrite(led, LOW); // switching off the led
delay(1000); // stopping the program for 1000 milliseconds
}
1.3.2 跑马灯。

示意图

原理图
参考代码:
int timer = 100; // The higher the number, the slower the timing.
void setup() { // use a for loop to initialize each pin as an output:
for (int thisPin = 2; thisPin < 8; thisPin++) {
pinMode(thisPin, OUTPUT);
}
}
void loop() {
// loop from the lowest pin to the highest:
for (int thisPin = 2; thisPin < 8; thisPin++) {
// turn the pin on:
digitalWrite(thisPin, HIGH);
delay(timer);
// turn the pin off:
digitalWrite(thisPin, LOW);
}
// loop from the highest pin to the lowest:
for (int thisPin = 7; thisPin >= 2; thisPin--) {
// turn the pin on:
digitalWrite(thisPin, HIGH);
delay(timer);
// turn the pin off:
digitalWrite(thisPin, LOW);
}
}
1.3.3 按键控制。

示意图

原理图
参考代码:
// constants won't change. They're used here to
// set pin numbers:
const int buttonPin = 2; // the number of the pushbutton pin
const int ledPin = 13; // the number of the LED pin
// variables will change:
int buttonState = 0; // variable for reading the pushbutton status
void setup() {
// initialize the LED pin as an output:
pinMode(ledPin, OUTPUT);
// initialize the pushbutton pin as an input:
pinMode(buttonPin, INPUT);
}
void loop(){
// read the state of the pushbutton value:
buttonState = digitalRead(buttonPin);
// check if the pushbutton is pressed.
// if it is, the buttonState is HIGH:
if (buttonState == HIGH) {
// turn LED on:
digitalWrite(ledPin, HIGH);
}
else {
// turn LED off:
digitalWrite(ledPin, LOW);
}
}
- 中级:
1.3.4 74HC595。
本项目使用两个74HC595移位寄存器,仅用3个Arduino管脚控制16个LED。

示意图

原理图
使用74HC595与数字直接控制LED有何优势,写出核心代码。(选做)
595驱动电流大,35毫安每个端口,操作灵活,需要数据线,时钟线,锁存线,(三态控制线,清零线 可不用),数目多的话用595可以方便的组成动态显示,电路简单成本低。
void _74hc595_init(void)
{
gpio_config_t io_conf = {
.intr_type = GPIO_PIN_INTR_DISABLE,
.mode = GPIO_MODE_OUTPUT,
.pin_bit_mask = (1ULL<
.pull_down_en = 1,
.pull_up_en = 0,
};
gpio_config(&io_conf);
HC595_SCK_Low();
HC595_RCK_Low();
HC595_Data_Low();
}
void HC595_Save(void)
{
HC595_RCK_Low(); // 将RCK拉低
delay(10);
HC595_RCK_High(); // 再将RCK拉高,RCK即可产生一个上升沿
}
void HC595_Send_Byte(uint8_t byte)
{
uint8_t i;
for (i = 0; i < 8; i ++) //一个字节8位,传输8次,一次一位,循环8次,刚好移完8位
{
HC595_SCK_Low(); // SCK拉低
if (byte & 0x80){ //先传输高位,通过与运算判断第八是否为1
HC595_Data_High(); //如果第八位是1,则与 595 DS连接的引脚输出高电平
}else{ //否则输出低电平
HC595_Data_Low();
}
byte <<= 1; // 左移一位,将低位往高位移,通过 if (byte & 0x80)判断低位是否为1
HC595_SCK_High(); // SHCP拉高, SHCP产生上升沿
}
}
void HC595_Send_Multi_Byte(uint8_t *data, uint16_t len)
{
uint8_t i;
for (i = 0; i < len; i ++ ) {
HC595_Send_Byte(data[i]);
debug_i("leve :%d data:%x",i,data[i]);
}
HC595_Save();
}
1.3.5 旋钮控制灯亮度。

示意图

原理图
- 高级:
开源机器人操作系统ROS和开源硬件Arduino[ESP32]联调(选修)
ROS 1.0 Melodic:
/*
* rosserial Subscriber Example
* Blinks an LED on callback
*/
#include
#include
ros::NodeHandle nh;
void messageCb( const std_msgs::Empty& toggle_msg){
digitalWrite(13, HIGH-digitalRead(13)); // blink the led
}
ros::Subscriber
void setup()
{
pinMode(13, OUTPUT);
nh.initNode();
nh.subscribe(sub);
}
void loop()
{
nh.spinOnce();
delay(1);
}
依次分别在不同终端运行如下命令:
roscore
rosrun rosserial_python serial_node.py /dev/ttyUSB0
rostopic pub toggle_led std_msgs/Empty --once
观察LED灯状态。
ROS 2.0 Dashing:
#include
#define XRCEDDS_PORT Serial
void subscribeLed(std_msgs::Bool* msg, void* arg)
{
(void)(arg);
digitalWrite(LED_BUILTIN, msg->data);
}
class LedSub : public ros2::Node
{
public:
LedSub()
: Node("ros2Arduino[ESP32]_sub_node")
{
this->createSubscriber
}
};
void setup()
{
XRCEDDS_PORT.begin(115200);
while (!XRCEDDS_PORT);
ros2::init(&XRCEDDS_PORT);
pinMode(LED_BUILTIN, OUTPUT);
}
void loop()
{
static LedSub LedNode;
ros2::spin(&LedNode);
}
1.4 实践内容
阅读1.3中示意图、原理图和参考代码,在Arduino[ESP32]平台上完成实践。
1.5 实践问题
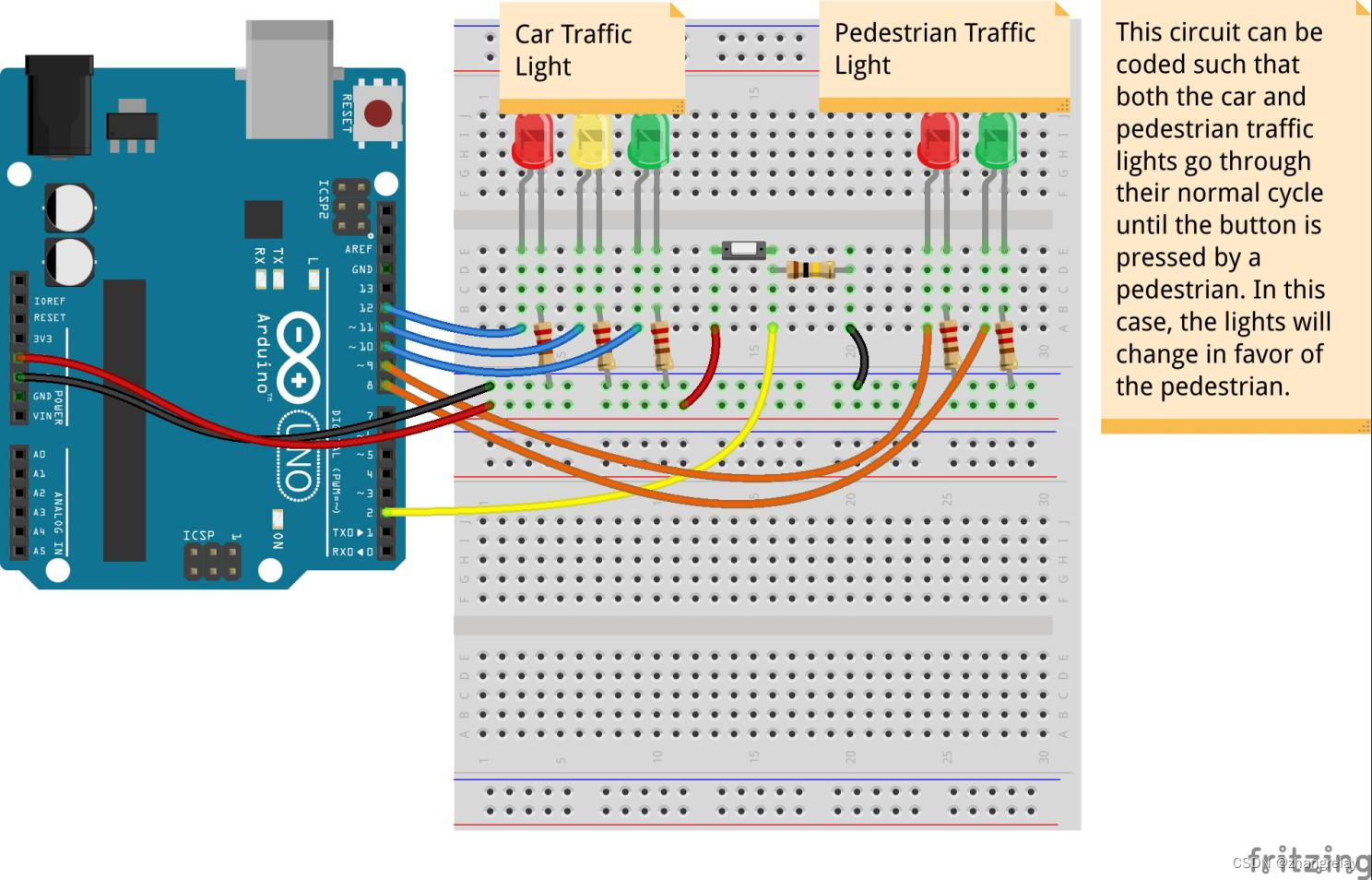
1.5.1交通灯:
该电路可以被编码,使得汽车和行人交通灯都经过正常循环,直到行人按下按钮。在这种情况下,灯会改变对行人的偏好。
示意图

原理图
请编写代码实现英文简介中的功能。
void setup() {
pinMode(LED_G, OUTPUT);
pinMode(LED_Y, OUTPUT);
pinMode(LED_R, OUTPUT);
}
void loop() {
digitalWrite(LED_G, LOW);点亮 绿灯
delay(5000);//延时5秒
digitalWrite(LED_G, HIGH); //熄灭 绿灯
for(int i=0;i<3;i++)//闪烁交替三次,黄灯闪烁效果
{
delay(500);//延时0.5 秒
digitalWrite(LED_Y, LOW);//点亮 黄灯
delay(500);//延时0.5 秒
digitalWrite(LED_Y, HIGH);//熄灭 黄灯
}
delay(500);//延时0.5 秒
digitalWrite(LED_R, LOW);//点亮 红灯
delay(5000);//延时5 秒
digitalWrite(LED_R, HIGH);//熄灭 红灯
}
1.5.2 能否调节非PWM口外接的LED灯的亮度,为什么?
能。
PWM是一种脉冲宽度调制,也就是看高电平持续的时长。PWM的占空比代表的是平均电压,占空比发生变化后LED和限流电阻两端的平均电压就会发生变化,那么流过LED的电流就会发生变化,这就是PWM调节亮度的原理。
int potpin=0;
int ledpin=11;
int val=0;
void setup()
{
pinMode ( ledpin, OUTPUT);
Serial.begin(9600);
}
void loop ()
{
val=analogRead(potpin);
Serial.println(val) ;
analogWrite(ledpin, val);
delay(10);
}
1.6 实践总结
回顾本次实践,遇到哪些问题,如何解决,经验和启发有哪些?
74HC595是一个8位串行输入、并行输出的位移缓存器:并行输出为三态输出。在SCK 的上升沿,串行数据由数据脚(A)输入到内部的8位位移缓存器,并由Q7’输出,而并行输出则是在LCK的上升沿将在8位位移缓存器的数据存入到8位并行输出缓存器。当串行数据输入端OE的控制信号为低使能时,并行输出端的输出值等于并行输出缓存器所存储的值。
评分:
-
相关阅读:
SpringMVC-针对处理器中的参数提供了许多参数解析器
itertools:Python3迭代库(持续更新ing...)
JAVA 读写文件(InputStream,FileReader)
一键分割视频并生成M3U8格式:高效管理视频内容,畅享流畅播放新体验
服务器探针-serverstatus
【RNA biology】RNA的多功能性与早期生命进化
Leetcode—137.只出现一次的数字II【中等】
基于多目标粒子群优化算法的冷热电联供型综合能源系统运行优化附Matlab代码
服务器开发24:tinyxml使用(服务器起服读取配置信息接口)
Ubuntu22.04.01Desktop桌面版安装记录221109
- 原文地址:https://blog.csdn.net/ZhangRelay/article/details/126257248