-
Linux应用基础——串口应用编程
基于平台:IMX6ULL PRO开发板- 1
串口介绍
串口(UART)的全称是Universal Asynchronous Receiver and Transmitter,即异步发送和接收。USART无论是在单片机中、嵌入式中都起到了非常重要的作用。并且串口的结构简单、稳定。因此受到大部分人的喜爱。另外,学习过单片机、stm32的都知道串口的作用。即:可以用于调试打印信息、还可外接传感器模块。
另外应用层设置串口的参数主要有:
波特率、起始位、数据位、校验位、停止位、行规层(TTY体系内)。扩展—— TTY体系
TTY简介
Linux中,TTY也许是跟终端有关系的最为混乱的术语。TTY是TeleTYpe的一个老缩写。Teletypes,或者teletypewriters,原来指的是电传打字机,是通过串行线用打印机键盘通过阅读和发送信息的东西,和古老的电报机区别并不是很大。之后,当计算机只能以批处理方式运行时,电传打字机成为唯一能够被使用的“实时”输入/输出设备。最终,电传打字机被键盘和显示器终端所取代,但在终端或TTY接插的地方,操作系统仍然需要一个程序来监视串行端口。一个getty“Get TTY”的处理过程是:一个程序监视物理的TTY/终端接口。对一个虚拟网络控制台(VNC)来说,一个伪装的TTY(Pseudo-TTY,即假冒的TTY,也叫做“PTY”)是等价的终端。当你运行一个xterm(终端仿真程序)或GNOME终端程序时,PTY对虚拟的用户或者如xterm一样的伪终端来说,就像是一个TTY在运行。“Pseudo”的意思是“duplicating in a fake way”(用伪造的方法复制),它相比“virtual”或“emulated”更能真实的说明问题。而在的计算中,它却处于被放弃的阶段。
tty也是一个Unix命令,用来给出当前终端设备的名称。
终端是一种字符型设备,它有多种类型,通常使用tty来简称各种类型的终端设备。
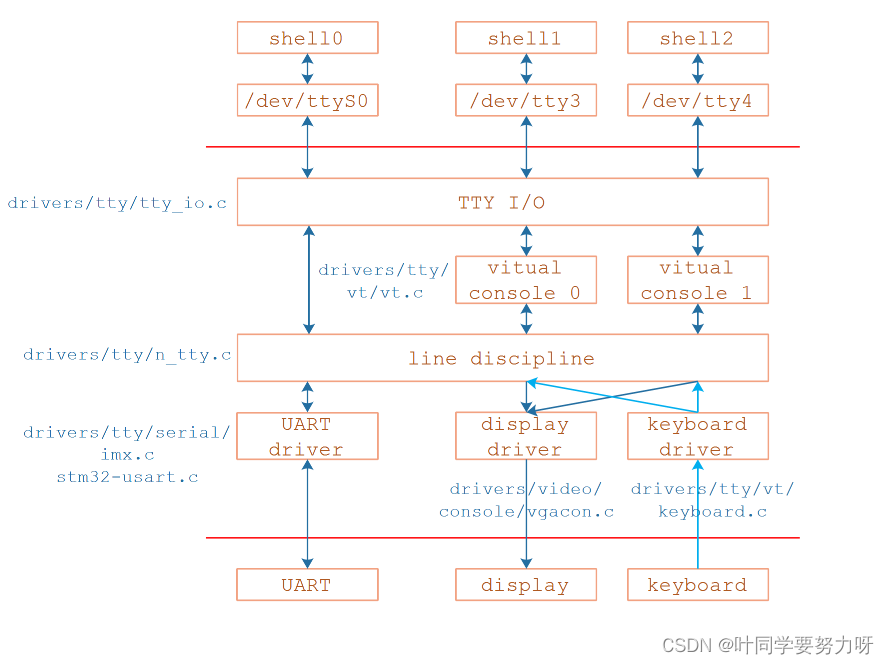
在Linux系统的设备特殊文件目录/dev/下。TTY系统框架
在韦东山的视频教程中给出了这么一个系统框架图
在这里面当中引用了行规层的概念。
代码部分
我们都知道串口有波特率、起始位、数据位、校验位、停止位这几位。
通过Linux应用串口的文章我们可以很好的吧串口编程逮捕编写出来。
参考链接:https://www.cnblogs.com/feisky/archive/2010/05/21/1740893.html基本配置部分
#include/*标准输入输出定义*/ #include /*标准函数库定义*/ #include /*Unix 标准函数定义*/ #include #include #include /*文件控制定义*/ #include /*POSIX 终端控制定义*/ #include /*错误号定义*/ /**********主要用来配置波特率、检验位等参数************/ int set_opt(int fd,int nSpeed, int nBits, char nEvent, int nStop) { struct termios newtio,oldtio; if ( tcgetattr( fd,&oldtio) != 0) { perror("SetupSerial 1"); return -1; } bzero( &newtio, sizeof( newtio ) ); newtio.c_cflag |= CLOCAL | CREAD; newtio.c_cflag &= ~CSIZE; newtio.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG); /*Input*/ newtio.c_oflag &= ~OPOST; /*Output*/ switch( nBits ) { case 7: newtio.c_cflag |= CS7; break; case 8: newtio.c_cflag |= CS8; break; } switch( nEvent ) { case 'O': newtio.c_cflag |= PARENB; newtio.c_cflag |= PARODD; newtio.c_iflag |= (INPCK | ISTRIP); break; case 'E': newtio.c_iflag |= (INPCK | ISTRIP); newtio.c_cflag |= PARENB; newtio.c_cflag &= ~PARODD; break; case 'N': newtio.c_cflag &= ~PARENB; break; } switch( nSpeed ) { case 2400: cfsetispeed(&newtio, B2400); cfsetospeed(&newtio, B2400); break; case 4800: cfsetispeed(&newtio, B4800); cfsetospeed(&newtio, B4800); break; case 9600: cfsetispeed(&newtio, B9600); cfsetospeed(&newtio, B9600); break; case 115200: cfsetispeed(&newtio, B115200); cfsetospeed(&newtio, B115200); break; default: cfsetispeed(&newtio, B9600); cfsetospeed(&newtio, B9600); break; } if( nStop == 1 ) newtio.c_cflag &= ~CSTOPB; else if ( nStop == 2 ) newtio.c_cflag |= CSTOPB; newtio.c_cc[VMIN] = 1; /* 读数据时的最小字节数: 没读到这些数据我就不返回! */ newtio.c_cc[VTIME] = 0; /* 等待第1个数据的时间: * 比如VMIN设为10表示至少读到10个数据才返回, * 但是没有数据总不能一直等吧? 可以设置VTIME(单位是10秒) * 假设VTIME=1,表示: * 10秒内一个数据都没有的话就返回 * 如果10秒内至少读到了1个字节,那就继续等待,完全读到VMIN个数据再返回 */ tcflush(fd,TCIFLUSH); if((tcsetattr(fd,TCSANOW,&newtio))!=0) { perror("com set error"); return -1; } //printf("set done!\n"); return 0; } /**********打开设备节点*************/ int open_port(char *com) { int fd; //fd = open(com, O_RDWR|O_NOCTTY|O_NDELAY); fd = open(com, O_RDWR|O_NOCTTY); if (-1 == fd){ return(-1); } if(fcntl(fd, F_SETFL, 0)<0) /* 设置串口为阻塞状态*/ { printf("fcntl failed!\n"); return -1; } return fd; } int main(int argc, char **argv) { int fd; int iRet; char c; /* 1. open */ /* 2. setup * 115200,8N1 * RAW mode * return data immediately */ /* 3. write and read */ if (argc != 2) { printf("Usage: \n"); printf("%s \n", argv[0]); return -1; } fd = open_port(argv[1]); if (fd < 0) { printf("open %s err!\n", argv[1]); return -1; } iRet = set_opt(fd, 115200, 8, 'N', 1); if (iRet) { printf("set port err!\n"); return -1; } printf("Enter a char: "); while (1) { scanf("%c", &c); /*********每次读写一位数据*************/ iRet = write(fd, &c, 1); iRet = read(fd, &c, 1); if (iRet == 0) //读取到数据的时候 { printf("get: %02x %c\n", c, c); } } return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
GPS模块的应用
查阅资料我们可以知道GPS模块也是可以通过串口通讯的。
因此我们这在理简单的运用串口运用GPS模块进行通讯。

这里我们知道对于GPS的串口设置标准。GPS模块数据格式
GPS使用多种标准数据格式,目前最通用的GNSS格式是NMEA0183格式。NMEA0183是最终定位格式,即将二进制定位格式转为统一标准定位格式,与卫星类型无关。这是一套定义接收机输出的标准信息,有几种不同的格式,每种都是独立相关的ASCII格式,逗点隔开数据流,数据流长度从30-100字符不等,通常以每秒间隔持续输出。
其标准格式为:$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*hh- 1
在其$上有多重格式,不同的格式代表的其意义不同:
GPGGA:单GPS BDGGA:单北斗 GLGGA:单GLONASS GNGGA:多星联合定位- 1
- 2
- 3
- 4
另外其<1>、<2>、<3> … 代表着不同的意思。
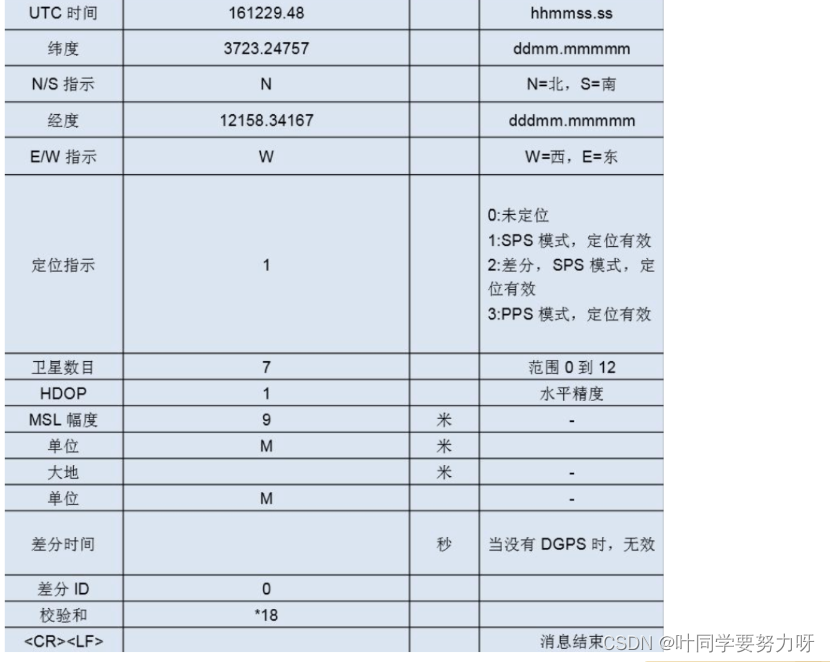
本例程使用GPGGA:单GPS模式,显示前五位的数据。即:时间、纬度、南北半球、经度、东西半球。GPS代码
#include#include #include #include #include #include #include #include #include /* set_opt(fd,115200,8,'N',1) */ int set_opt(int fd,int nSpeed, int nBits, char nEvent, int nStop) { struct termios newtio,oldtio; if ( tcgetattr( fd,&oldtio) != 0) { perror("SetupSerial 1"); return -1; } bzero( &newtio, sizeof( newtio ) ); newtio.c_cflag |= CLOCAL | CREAD; newtio.c_cflag &= ~CSIZE; newtio.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG); /*Input*/ newtio.c_oflag &= ~OPOST; /*Output*/ switch( nBits ) { case 7: newtio.c_cflag |= CS7; break; case 8: newtio.c_cflag |= CS8; break; } switch( nEvent ) { case 'O': newtio.c_cflag |= PARENB; newtio.c_cflag |= PARODD; newtio.c_iflag |= (INPCK | ISTRIP); break; case 'E': newtio.c_iflag |= (INPCK | ISTRIP); newtio.c_cflag |= PARENB; newtio.c_cflag &= ~PARODD; break; case 'N': newtio.c_cflag &= ~PARENB; break; } switch( nSpeed ) { case 2400: cfsetispeed(&newtio, B2400); cfsetospeed(&newtio, B2400); break; case 4800: cfsetispeed(&newtio, B4800); cfsetospeed(&newtio, B4800); break; case 9600: cfsetispeed(&newtio, B9600); cfsetospeed(&newtio, B9600); break; case 115200: cfsetispeed(&newtio, B115200); cfsetospeed(&newtio, B115200); break; default: cfsetispeed(&newtio, B9600); cfsetospeed(&newtio, B9600); break; } if( nStop == 1 ) newtio.c_cflag &= ~CSTOPB; else if ( nStop == 2 ) newtio.c_cflag |= CSTOPB; newtio.c_cc[VMIN] = 1; /* 读数据时的最小字节数: 没读到这些数据我就不返回! */ newtio.c_cc[VTIME] = 0; /* 等待第1个数据的时间: * 比如VMIN设为10表示至少读到10个数据才返回, * 但是没有数据总不能一直等吧? 可以设置VTIME(单位是10秒) * 假设VTIME=1,表示: * 10秒内一个数据都没有的话就返回 * 如果10秒内至少读到了1个字节,那就继续等待,完全读到VMIN个数据再返回 */ tcflush(fd,TCIFLUSH); if((tcsetattr(fd,TCSANOW,&newtio))!=0) { perror("com set error"); return -1; } //printf("set done!\n"); return 0; } int open_port(char *com) { int fd; //fd = open(com, O_RDWR|O_NOCTTY|O_NDELAY); fd = open(com, O_RDWR|O_NOCTTY); if (-1 == fd){ return(-1); } if(fcntl(fd, F_SETFL, 0)<0) /* 设置串口为阻塞状态*/ { printf("fcntl failed!\n"); return -1; } return fd; } int read_gps_raw_data(int fd, char *buf) { int i = 0; int iRet; char c; int start = 0; while (1) { iRet = read(fd, &c, 1); if (iRet == 1) { if (c == '$') start = 1; if (start) { buf[i++] = c; } if (c == '\n' || c == '\r') return 0; } else { return -1; } } } /* eg. $GPGGA,082559.00,4005.22599,N,11632.58234,E,1,04,3.08,14.6,M,-5.6,M,,*76" */ */ int main(int argc, char **argv) { int fd; int iRet; char c; char buf[1000]; char time[100]; char Lat[100]; char ns[100]; char Lng[100]; char ew[100]; float fLat, fLng; /* 1. open */ /* 2. setup * 115200,8N1 * RAW mode * return data immediately */ /* 3. write and read */ if (argc != 2) { printf("Usage: \n"); printf("%s \n", argv[0]); return -1; } fd = open_port(argv[1]); if (fd < 0) { printf("open %s err!\n", argv[1]); return -1; } iRet = set_opt(fd, 9600, 8, 'N', 1); if (iRet) { printf("set port err!\n"); return -1; } while (1) { /* eg. $GPGGA,082559.00,4005.22599,N,11632.58234,E,1,04,3.08,14.6,M,-5.6,M,,*76"*/ - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
-
相关阅读:
阿里内部首发面试终极指南V3.0,相对一线大厂面试知识点+面试题
Springboot旅游餐饮服务平台r1n3j计算机毕业设计-课程设计-期末作业-毕设程序代做
使用Cmake编译项目从入门到精通
【C语言】数据结构的基本概念与评价算法的指标
五个分层维度:SpringBoot工程分层实战
ping命令
【JavaWeb】JSP技术详解
RabbitMQ的常用交换机在springboot中的使用
目标检测工程化最佳实践:Python 并行条件下YOLOv8的模型推理,线程安全的模型推理!
<数据结构> - 数据结构在算法比赛中的应用(下)
- 原文地址:https://blog.csdn.net/weixin_51914919/article/details/126186116
