-
Matlab 在3D 视觉的应用 01 显示PCD点云
前言:
PCD 点云是3D 视觉里面常用的一个三维数据,在Matlab里面有一个通用的展示的函数:pcread,但是这个函数的通用性比较大,所以,要切实玩转PCD格式的点云,还需要动一动实践才行。
1 读取文件:
A = pcread ('test.pcd'); pcshow(A);- 1
- 2
读取 PCD 点云的调用方法似乎极其简单,就是上面两个函数,一个读取,一个展示:
然而,当我打开一个正方体的点云数据时候:
是这个样子的,

然后,我们选择旋转之后,隐约看到一大团绿的正方体的东西,可是我们的深度信息呢?别急,我们下一节就介绍这个应用的详细了。2 调整展示
2.1 为啥会出现一团绿:
我们右键看一下:【右键】\ 选择 Colormap Value
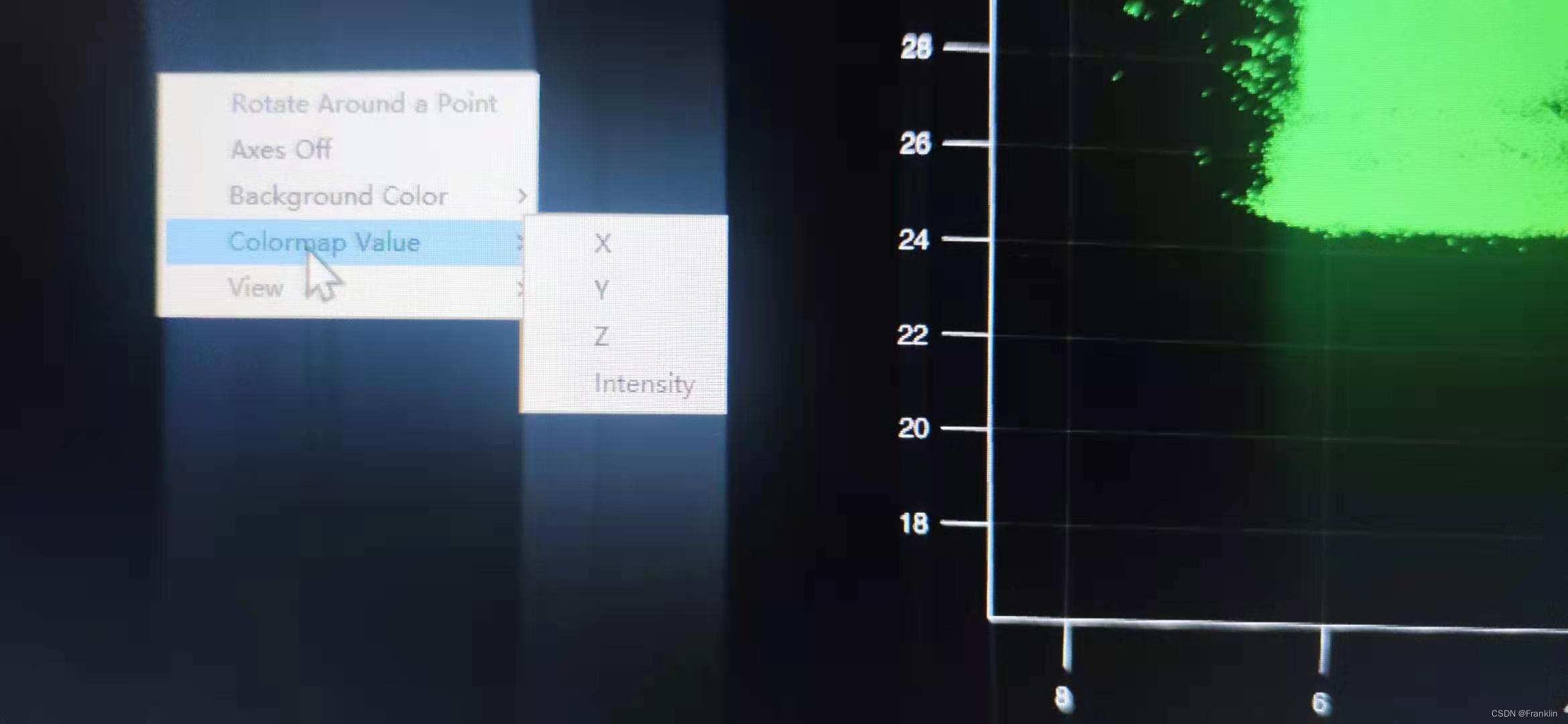
【案,这里由于Matlab默认是用intensity,这时候就是一个颜色了】2.2 显示深度信息
【右键】\ 选择 Colormap Value \ z
现在我们选择Z,这个选项,就是深度选项,这时候,深度图像的不同颜色的值就显示出来了。

3 调整深度的颜色展示精度
这一点,在做3D检测的时候,尤其有用,如果测量的物体比较薄,用比较大范围的深度颜色去匹配还是比较容易混淆。
那么,我们怎么设定最适合的深度颜色范围内,
如图:

这个例子里面,我们要测量的是一个正方体,那么,这个正方体的深度就是在四个角这里限定了,我们点选图中四个角。
点选的方法,是选择箭头处的位置标注,然后,用右键,选择增加标注点,

在这个例子里面,方块的深度范围在18.98,到19.64之间:
我们在上方的工具栏里面,选择【编辑\颜色图】
如下图,

我们把颜色图的范围限定在正方体的深度范围内,这时候,对比之前的深度图,这个时候,正方形内的深度细节就很有层次的反应出来。其他的几个小技巧
旋转

选择【旋转】功能,然后,拖动鼠标即可
但是, 有时候,选择后,很难恢复到我们之前固定的角度,比如X,Y平面选择平面
右键【view】\【XY】可以很方便的,把刚才旋转的图像恢复的默认的一个视野。
小结
本章比较详细的介绍了PCD点云在Matlab的展现方法,希望对有需要的读者有帮助。
-
相关阅读:
Vue.js核心技术解析与uni-app跨平台实战开发学习笔记 第9章 axios发送HTTP请求 9.3.4 promise中的常用API
为什么配置Java环境后会出现SSL问题?
IDEA快捷键(windows)
怎么画深度优先生成树和广度优先生成树【简答题】
光致发光荧光量子检测的作用
分享一个爬虫数据挖掘 农村产权交易数据可视化平台 数据分析大数据 Java、python双版(源码、调试、LW、开题、PPT)
【Vue.js】使用Element搭建登入注册界面&axios中GET请求与POST请求&跨域问题
【网络教程】IPtables官方教程--学习笔记1
使用YAML配置Spring boot的外部属性
LeetCode(力扣)78. 子集Python
- 原文地址:https://blog.csdn.net/yellow_hill/article/details/126200664