-
TI mmWave radar sensors Tutorial 笔记 | Module 5: Angle Estimation
本系列为TI(Texas Instruments) mmWave radar sensors 系列视频公开课 的学习笔记。
-
视频网址: https://training.ti.com/intro-mmwave-sensing-fmcw-radars-module-1-range-estimation?context=1128486-1139153-1128542
-
关注 下面的公众号,回复“ TI毫米波 ”,即可获取 本系列完整的pdf笔记文件~
内容在CSDN和微信公众号同步更新

- Markdown源文件暂未开源
- 笔记难免存在问题,欢迎联系指正
FMCW Radars – Module 1 : Range Estimation
FMCW Radars – Module 2 : The Phase of the IF Signal
FMCW Radars – Module 3 : Velocity Estimation
FMCW Radars – Module 4 : Some System Design Topics
FMCW Radars – Module 5 : Angle EstimationModule 5 Angle Estimation
- Content
- Angle Estimation of a single object
- Field of view
- Angle resolution
- Discussion on Range, Velocity and Angle Resolution
This module: to answer the following question
- 1 How does the radar estimate the angle of arrival of an object in front of the radar?
- 2 What if there are multiple objects at different angles ?
- 3 What determines the maximum field of view ?
- 4 What does the angle resolution depend on?
Basis of Angle of Arrival (AoA) estimation
- Recall:
- a small change in the distance of the object ⇒ \Rightarrow ⇒
- result in a phase change ( ω \omega ω) in the peak of the range-FFT

- Angle Estimation :
- requires at least 2 RX antennas
- 不同天线回波由于角度不同会存在距离差, results in a phase change in the 2D-FFT peak, 从而计算出AoA

Question: Why are these two expressions off by a factor of 2?
- 因为 Δ Φ = 2 π f c Δ τ \Delta \Phi = 2\pi f_c \Delta \tau ΔΦ=2πfcΔτ
- 而这里的 Δ τ = Δ d / c \Delta \tau = \Delta d/c Δτ=Δd/c , instead of Δ τ = 2 Δ d / c \Delta \tau = 2\Delta d/c Δτ=2Δd/c
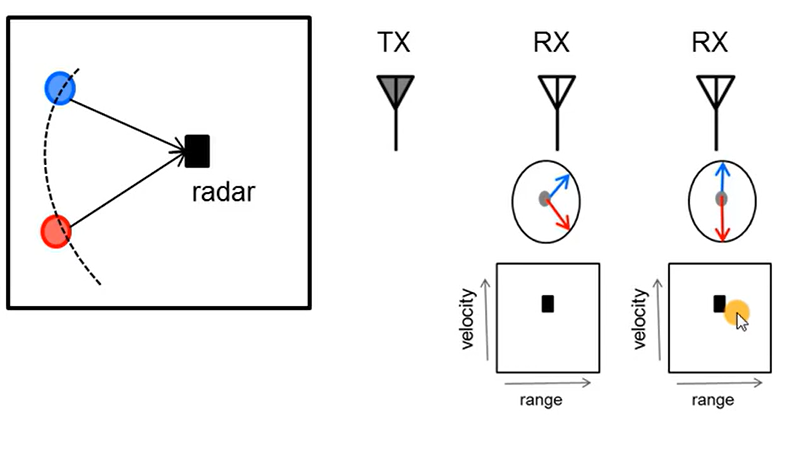
How to measure the AoA of an object using 2 RX antennas?
- TX antenna transmits a frame of chirps
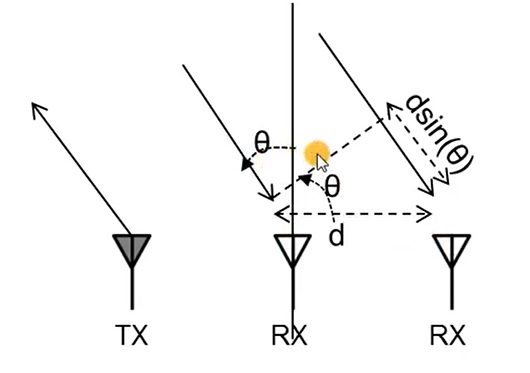
- The 2D-FFT corresponding to each RX antenna will have peaks in the same location but with differing phase
- 如下图
- The measured phase difference
(
ω
)
(\omega)
(ω) can be used to estimate the AoA of the object
- ω = 2 π d s i n ( θ ) λ \omega = \frac{2\pi d sin(\theta)}{\lambda} ω=λ2πdsin(θ)
- ⇒ \Rightarrow ⇒ θ = s i n − 1 ( λ ω 2 π d ) \theta = sin^{-1} (\frac{\lambda \omega}{2 \pi d}) θ=sin−1(2πdλω)
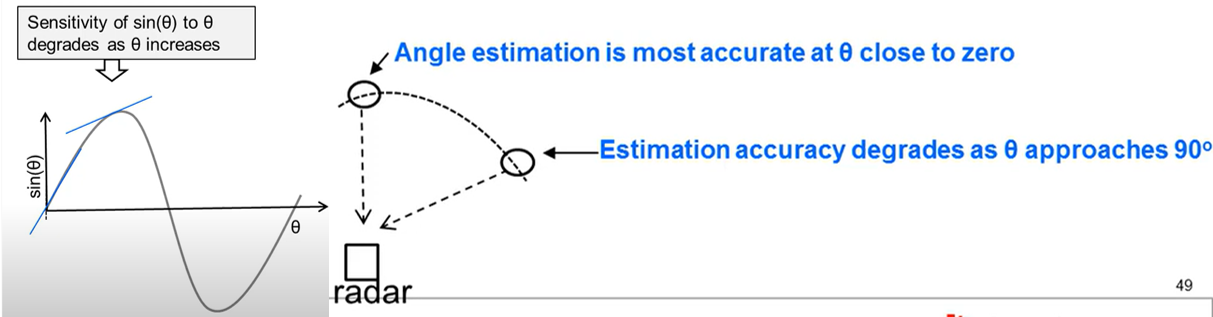
Estimation accuracy depends A o A AoA AoA
- Note that the relationship between
ω
\omega
ω and
θ
\theta
θ is non-linear
- unlike in the case of velocity ( ω = 4 π v T c λ \omega = \frac{4\pi v T_c}{\lambda} ω=λ4πvTc)
- 非线性的影响:
- At θ = 0 \theta = 0 θ=0, ω \omega ω is most sensitive to changes in θ \theta θ
- Hence: estimation of θ \theta θ is more error prone as θ \theta θ increases
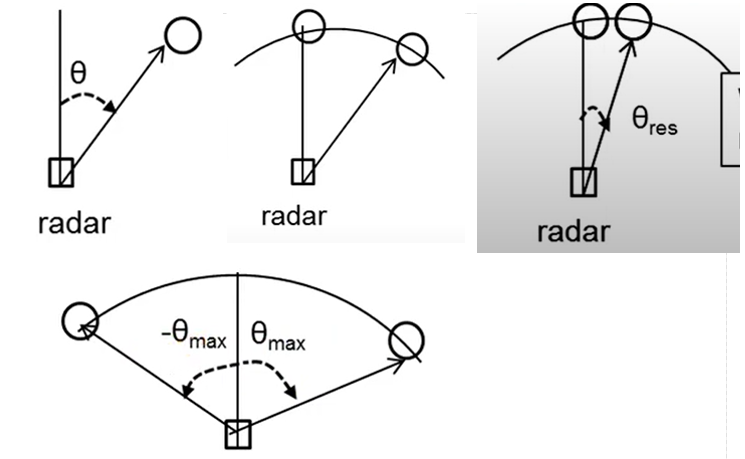
Angular Field of View
- 如下图,同样是
∣
ω
∣
<
18
0
∘
|\omega| < 180 ^\circ
∣ω∣<180∘
- Unambiguous only if ∣ ω ∣ < 18 0 ∘ |\omega| < 180 ^\circ ∣ω∣<180∘

- Unambiguous measurement of angle:
- ⇒ \Rightarrow ⇒ ∣ ω ∣ < 18 0 ∘ |\omega| < 180^\circ ∣ω∣<180∘
- $\frac{2\pi d sin(\theta)}{\lambda} < \pi < / f o n t > ∗ ∗ ∗ ∗ < f o n t c o l o r = g r e e n f a c e = " C o m i c S a n s M S , S T X i n w e i " > ** ** </font>∗∗∗∗<fontcolor=greenface="ComicSansMS,STXinwei">\Rightarrow < / f o n t > ∗ ∗ ∗ ∗ < f o n t c o l o r = r e d f a c e = " S e g o e P r i n t , S T K a i t i " > ** ** </font>∗∗∗∗<fontcolor=redface="SegoePrint,STKaiti">\theta < sin^{-1} (\frac{\lambda}{2d})$
结论:
- The maximum FoV that can be serviced by two antennas spaced
d
d
d apart is:
- θ m a x = s i n − 1 ( λ 2 d ) \theta_{max} = sin^{-1} (\frac{\lambda}{2d}) θmax=sin−1(2dλ)
- if spacing
d
=
λ
/
2
d=\lambda /2
d=λ/2 results in the largest FoV: ±90
∘
^\circ
∘
(注意这里符号d的含义)
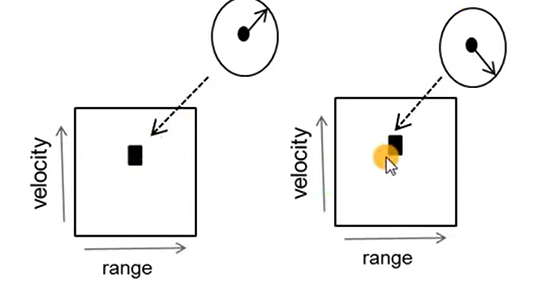
Measuring AoA of multiple objects at the same range and velocity
- Consider two objects equidistant from the radar approaching the radar at the same relative speed to the radar
- The value at the peak has phasor components from both objects
- ⇒ \Rightarrow ⇒ Hence previous approach will not work
- Solution :
- An FFT on the sequence of phasors corresponding to the 2D-FFT peaks resolves the two objects
- ⇒ \Rightarrow ⇒ angle-FFT
- ω 1 \omega_1 ω1 and ω 2 \omega_2 ω2 correspond to the phase difference between consecutive chirps for the respective objects

结论 :
- θ 1 = s i n − 1 ( λ ω 1 2 π d ) \theta_1 = sin^{-1}(\frac{\lambda \omega_1}{2\pi d}) θ1=sin−1(2πdλω1)
- θ 2 = s i n − 1 ( λ ω 2 2 π d ) \theta_2 = sin^{-1}(\frac{\lambda \omega_2}{2\pi d}) θ2=sin−1(2πdλω2)
Angle Resolution
- Angle Resolution :
- Two objects at AOA’s of θ \theta θ and θ + Δ θ \theta + \Delta \theta θ+Δθ
- How small can Δ θ \Delta \theta Δθ can get?
- Use the following:
- An object with an AOA of θ \theta θ has a discrete frequency of ω = 2 π d s i n ( θ ) λ \omega = \frac{2\pi d sin(\theta)}{\lambda} ω=λ2πdsin(θ) in the angle-FFT
- Criterion for separation in the frequency domain: Δ ω > 2 π N \Delta \omega > \frac{2\pi}{N} Δω>N2π
- N: the number of samples in the FFT
- 推导:
- Δ ω = 2 π d λ ( s i n ( θ + Δ θ ) − s i n ( θ ) ) ≈ 2 π d λ ( c o s ( θ ) Δ θ ) \Delta \omega = \frac{2\pi d}{\lambda} (sin(\theta + \Delta \theta) - sin(\theta)) \approx \frac{2\pi d}{\lambda} (cos(\theta)\Delta \theta) Δω=λ2πd(sin(θ+Δθ)−sin(θ))≈λ2πd(cos(θ)Δθ)
- 因为 s i n ( θ ) sin(\theta) sin(θ)的derivative是 c o s ( θ ) cos(\theta) cos(θ)
- ⇒ \Rightarrow ⇒ Δ ω > 2 π N \Delta \omega > \frac{2\pi}{N} Δω>N2π
- ⇒ \Rightarrow ⇒ Δ θ > λ N d c o s ( θ ) \Delta \theta > \frac{\lambda}{Ndcos(\theta)} Δθ>Ndcos(θ)λ
结论 :
- Angle resolution given by: θ r e s = λ N d c o s ( θ ) \theta_{res} = \frac{\lambda}{N d cos(\theta)} θres=Ndcos(θ)λ
- Resolution is often quoted assuming d = λ / 2 d=\lambda/2 d=λ/2 and θ = 0 \theta = 0 θ=0 ⇒ \Rightarrow ⇒ θ r e s = 2 / N \theta_{res} = 2/N θres=2/N
Note 1 :
- 角度分辨率与角度
θ
\theta
θ有关
- Resolution best at θ = 0 \theta = 0 θ=0
- Resolution degrades as AoA increases (如下图)

Comparison of Angle & Velocity Estimation
-
角度 和 速度估计 存在很多相似的地方,可以对比
-
Angle Estimation:
- 基于:天线的 空间分离
- 分辨率 θ r e s = λ N d c o s ( θ ) \theta_{res} = \frac{\lambda}{Ndcos(\theta)} θres=Ndcos(θ)λ,分辨率取决于 孔径(空间)大小
- 最大测量角度( θ m a x = λ 2 d \theta_{max} = \frac{\lambda}{2d} θmax=2dλ)取决于天线间的 空间距离 d d d
-
速度估计
- 基于chirps的 时间分离
- 分辨率 v r e s = λ 2 T f v_{res} = \frac{\lambda}{2T_f} vres=2Tfλ 取决于 帧(时间)长度
- 最大测量速度 λ T c \frac{\lambda}{T_c} Tcλ取决于chirps的 时间间隔 T c T_c Tc

Angle Estimation in FMCW radar
- A single TX, RX chain can estimate the range and velocity of multiple objects
- localization / imaging: 需要 range + angle
- angle estimation: needs Multiple RX antennass
- The 2D FFT grid is generated at each RX chain (correpsonding to each antenna)
- FFT on the corresponding peak across antennas is used to estimate the angle
系列完结 End
-
-
相关阅读:
【PAT甲级 - C++题解】1056 Mice and Rice
设计模式-原型模式的应用场景及Java中对抽象工厂的应用
追踪邮件插件:Unlimited Email Tracker 安装——帮你时刻关注对方会不会点击你的邮件
网络安全学习:系统文本编辑命令
Express框架
mysql8离线安装
docker-ip与服务器ip冲突问题
Go语言数组
SQLite实现的学生管理系统
Java面试题-UDP\TCP\HTTP
- 原文地址:https://blog.csdn.net/qazwsxrx/article/details/126200810
{kind=link}