-
定时器浅析
定时器浅析
定时器是服务器中一个很重要的部件,比如定时对连接的进行健康检测,在设计协程的sleep API时也需要定时器的介入,因此有效地组织这些定时事件,使之能在预期的时间点被触发且不影响服务器的主要逻辑,对于服务器的性能有着至关重要的影响。为此,定时器的设计值得我们去深入学习,本文将浅析定时器的设计及其在不同数据结构下的表现。
Timer
话不多说,直接上代码,从源码开始分析,这是我的一个服务器框架的定时器。
class TimeManager; // 定时器管理器 class Timer : public std::enable_shared_from_this{ // 定时器 friend class TimeManager; public: using ptr = std::shared_ptr ; bool cancel(); bool refresh(); bool reset(uint64_t ms, bool from_now); private: Timer(uint64_t ms, std::function - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
定时器其实并不只指定时器,其实还包括定时器容器(
TimeManager),定时器容器的设计正式定时器的精妙所在。从上面的代码我们可以看到,定时器有五个私有变量,分别是:
m_ms: 定时器的执行周期m_next: 定时器事件还有多久时间就会执行m_cb: 定时器回调函数m_manager: 定时器到达时间执行事件后是否继续定时
还有定义了私有类
Compare是供TimeManager调用的,后文再说它的设计。三个公有接口:
cancel(): 取消定时器事件refresh(): 重新计算时间reset(): 重新设置定时器的执行周期,可以选择是否重新计时
这里有一个细节,就是构造函数是私有的,切
TimeManager被设置成友元类,所以Timer只能通过TimeManager创建下面是公有接口的实现代码:
cancel()
bool Timer::cancel() { TimeManager::MutexType::Lock lock(m_manager->m_mutex); if(m_cb){ auto it = m_manager->m_timers.find(shared_from_this()); m_manager->m_timers.erase(it); return true; } return false; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
m_manager->mutex是TimeManager用来保护计时器容器的互斥量,保证线程安全。如果有回调函数的话,则从TimeManager的容器中删除掉本身。refresh()
bool Timer::refresh() { TimeManager::MutexType::Lock lock(m_manager->m_mutex); if(!m_cb){ return false; } auto it = m_manager->m_timers.find(shared_from_this()); if(it == m_manager->m_timers.end()){ return false; } m_manager->m_timers.erase(it); m_next = GetCurrentMS() + m_ms; m_manager->m_timers.insert(shared_from_this()); return true; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
先加锁对TimeManager的容器进行保护,如果没有回调函数,直接返回,否则在容器中寻找本身,找到后先从容器中删除,更新m_ms后重新加入。
reset()
bool Timer::reset(uint64_t ms, bool now_time) { if(ms == m_ms && now_time == false){ return true; } TimeManager::MutexType::Lock lock(m_manager->m_mutex); if(!m_cb){ return false; } auto it = m_manager->m_timers.find(shared_from_this()); if(it == m_manager->m_timers.end()){ return false; } m_manager->m_timers.erase(it); uint64_t start = 0; if(now_time) { start = acid::GetCurrentMS(); } else { start = m_next - m_ms; } m_ms = ms; m_next = start + m_ms; m_manager->addTimer(shared_from_this(), lock); return true; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
TimeManager
class TimeManager{ friend class Timer; public: using MutexType = Mutex; TimeManager(); virtual ~TimeManager(); Timer::ptr addTimer(uint64_t ms, std::functioncond, bool recurring = false); uint64_t getNextTimer(); void getExpiredCallbacks(std::vector - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
TimeManager是定时器的核心部分,管理者所有的容器。
TimeManager有三个私有成员,分别是:
m_mutex: 互斥量,用于保护m_timers,使线程安全。m_timers: 存储所有定时器的集合,底层是红黑树,比较函数是Timer::Comparem_tickled
TimeManager有两个procted函数,这是因为在我的项目中TimeManager是IOManager的基类之一,这里可以把他看成公有接口。我们看下几个接口的实现
addTimer
Timer::ptr TimeManager::addTimer(uint64_t ms, std::function- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
第一个
addTimer是公有接口外部可以调用,封装完会调用内部的addTimer,也就是第二个,如果插在第一个位置要调用IOManager来检测下一次到时时间。addConditionTimer
Timer::ptr TimeManager::addConditionTimer(uint64_t ms, std::functioncond, bool recurring) { return addTimer(ms,[cb, cond](){ std::shared_ptr tmp = cond.lock(); if(tmp){ cb(); } }, recurring); } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
这里说下cond为什么是weak_ptr,以connect_with_timeout(addConditionTimer的一个调用,负责设置有时间限制的connect)为例
std::shared_ptrtinfo(1); std::weak_ptr winfo(tinfo); if(timeout_ms != (uint64_t)-1) { timer = iom->addConditionTimer(timeout_ms, [winfo, fd, iom]() { auto t = winfo.lock(); if(!t || t->cancelled) { return; } t->cancelled = ETIMEDOUT; iom->cancelEvent(fd, sylar::IOManager::WRITE); }, winfo); } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
本地条件变量是tinfo(一个指向int的智能指针),添加条件计时器是新建了一个与tinfo关联的的weak_ptr,此时有两种情况
- WRITE先到,connect_with_timeout执行,取消定时器,定时器回调加入调度,shared_ptr析构,weak_ptr失效,回调执行时,weak_ptr失效,lock失败,回调不执行,无事发生。
- TIMEOUT先到,定时器回调执行,新的shared_ptr创建,回调调用,以connect_with_timeout为例,回调会对条件变量赋值以示超时,回调结束,取消WRITE event,触发一次WRITE event,connect_with_timeout执行,得知条件变量被设置,直到超时,返回错误,shared_ptr析构
getNextTimer
uint64_t TimeManager::getNextTimer() { MutexType::Lock lock(m_mutex); if(m_timers.empty()){ return ~0ull; } m_tickled = false; Timer::ptr timer = *m_timers.begin(); uint64_t now = GetCurrentMS(); if(now >= timer->m_next){ return 0; } else { return timer->m_next - now; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
获取第一个超时定时器,直接取得最近一个定时器即
*m_timers.begin(),然后判断是否到时即可。getExpiredCallbacks
void TimeManager::getExpiredCallbacks(std::vector- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
getExpiredCallbacks是获取所有到期定时器的回调函数,我们可以看到调用的是set的upper_bound,可以在O(logn)的时间内完成查找
到所有到时计时器。
基于升序链表的定时器
前面介绍的定时器是基于C++STL中的set(红黑树)来存储的,Timer的存储还有很多方式,比如升序链表就是其中之一。
class Timer { public: using callback = function- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
很正常的设计,因为是基于侵入式链表管理的,所以多加了两个Timer*指针。因为它是有序的,所以每次插入时都要寻找合适的位置,时间复杂度是O(n)。但链表也有链表的优势,就是插入(插入节点)和删除节点很快,比set(红黑树快很多)。
基于时间轮的定时器
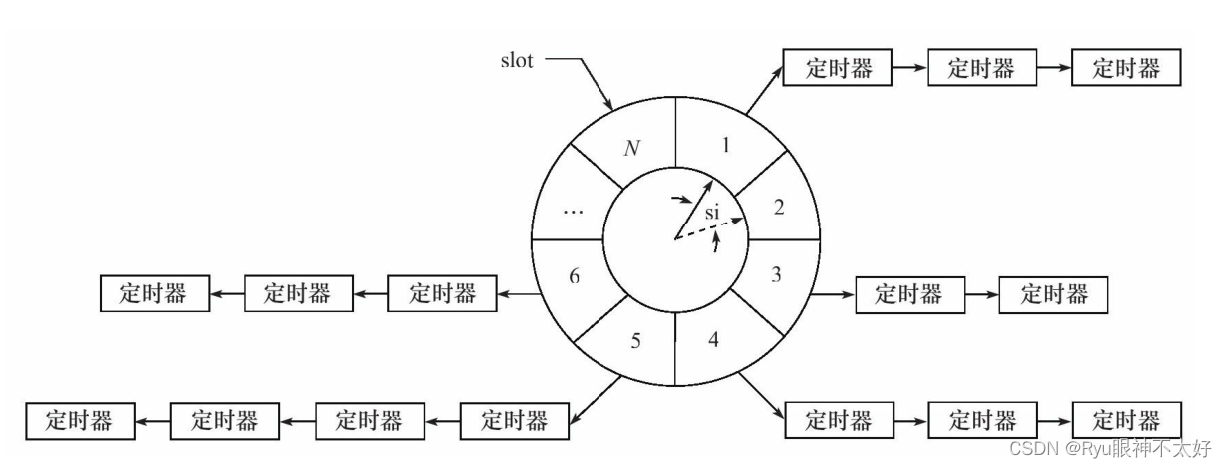
在一个时间轮内,(实线)指针指向轮子上的一个槽(slot)。它以恒定的速度顺时针转动,每转动一步就指向下一个槽(虚线指针指向的槽),每次转动称为一个滴答(tick)。一个滴答的时间称为时间轮的槽间隔si(slot interval),它实际上就是心搏时间。该时间轮共有N个槽,因此它运转一周的时间是Nsi。每个槽指向一条定时器链表,每条链表上的定时器具有相同的特征:它们的定时时间相差Nsi的整数倍。时间轮正是利用这个关系将定时器散列到不同的链表中。假如现在指针指向槽cs,我们要添加一个定时时间为ti的定时器,则该定时器将被插入槽ts(timer slot)对应的链表中。
这其实就是在排序链表的基础上,将Timer散列化,通过消费额外的空间来记录更多的信息争取更少的时间。
class Timer{ public: using callback = function- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
对时间轮而言,添加一个定时器的时间复杂度是O(1),删除一个定时器的时间复杂度也是O(1),执行一个定时器的时间复杂度是O(n)。但实际上执行一个定时器任务的效率要比O(n)好得多,因为时间轮将所有的定时器散列到了不同的链表上。时间轮的槽越多,等价于散列表的入口(entry)越多,从而每条链表上的定时器数量越少。此外,我们的代码仅使用了一个时间轮。当使用多个轮子来实现时间轮时,执行一个定时器任务的时间复杂度将接近O(1)。
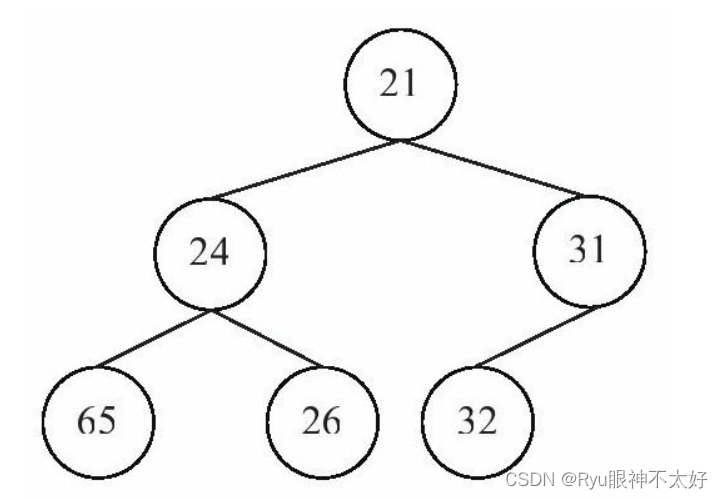
基于时间堆的定时器
时间堆的基本原理是: 将所有定时器中超时时间最小的一个定时器的超时值作为心搏间隔。这样,一旦心搏函数tick被调用,超时时间最小
的定时器必然到期,我们就可以在tick函数中处理该定时器。然后,再次从剩余的定时器中找出超时时间最小的一个,并将这段最小时间设置为下一次心搏间隔。如此反复,就实现了较为精确的定时。这和上文项目详解的计时器很像,都是以超时时间最小的一个定时器的超时值作为心搏间隔,但我项目里用的是红黑树存储,其实还可以用最小堆存储。
class Timer { public: using callback = function- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
对时间堆而言,添加一个定时器的时间复杂度是O(lgn),删除一个定时器的时间复杂度是O(1),执行一个定时器的时间复杂度是O(1)。因此,时间堆的效率是很高的。
最后
计时器的设计其实和排序算法很像,不同的数据结构带来不同的收益,空间和时间之间的权衡,这也正是数据结构的美妙所在。
-
相关阅读:
【水滴计划】:合并两个有序数组、寻找两个正序数组的中位数
Vue关键知识点
简易SSM框架转账
高可用组件,Keepalived详解
[杂项]从子域名接管到Subtaker
【python数据分析刷题】-N07.合并
React | 初学react(JSX创建虚拟DOM、创建组件的两种方法)
ruoyi-nbcio-plus基于vue3的多租户机制
anaconda使用系列教程--4)环境迁移
入侵检测——WebCrack
- 原文地址:https://blog.csdn.net/Chris_Eddy/article/details/126176506
