-
MMDeploy部署实战系列【第六章】:将编译好的MMdeploy导入到自己的项目中 (C++)
MMDeploy部署实战系列【第六章】:将编译好的MMdeploy导入到自己的项目中 (C++)
⭐️ ⭐️ ⭐️ 这个系列是一个随笔,是我走过的一些路,有些地方可能不太完善。如果有那个地方没看懂,评论区问就可以,我给补充。
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
目录:
0️⃣ mmdeploy源码安装 (转换faster rcnn r50/yolox为tensorrt,并进行推理)_gy77
内容:一文包含了在Linux系统下安装mmdeploy模型转换环境,模型转换为TensorRT,在Linux,Windows下模型推理,推理结果展示。
1️⃣ MMDeploy部署实战系列【第一章】:Docker,Nvidia-docker安装_gy77
内容:docker/nvidia-docker安装,docker/nvidia-docker国内源,docker/nvidia-docker常用命令。
2️⃣ MMDeploy部署实战系列【第二章】:mmdeploy安装及环境搭建_gy77
内容:mmdeploy环境安装三种方法:源码安装,官方docker安装,自定义Dockerfile安装。
3️⃣ MMDeploy部署实战系列【第三章】:MMdeploy pytorch模型转换onnx,tensorrt_gy77
内容:如何查找pytorch模型对应的部署配置文件,模型转换示例:mmcls:resnext50,mmdet:yolox-s,faster rcnn50。
4️⃣ MMDeploy部署实战系列【第四章】:onnx,tensorrt模型推理_gy77
内容:在linux,windows环境下推理,Windows下推理环境安装,推理速度对比,显存对比,可视化展示。
5️⃣ MMDeploy部署实战系列【第五章】:Windows下Release x64编译mmdeploy(C++),对TensorRT模型进行推理_gy77
内容:Windows下环境安装编译环境,编译c++ mmdeploy,编译c++ mmdeploy demo,运行实例。
6️⃣ MMDeploy部署实战系列【第六章】:将编译好的MMdeploy导入到自己的项目中 (C++)_gy77
内容:Windows下环境导入我们编译好的mmdeploy 静态/动态库。
下面是正文:
官方文档: 操作概述 — mmdeploy 0.6.0 文档
项目环境配置:
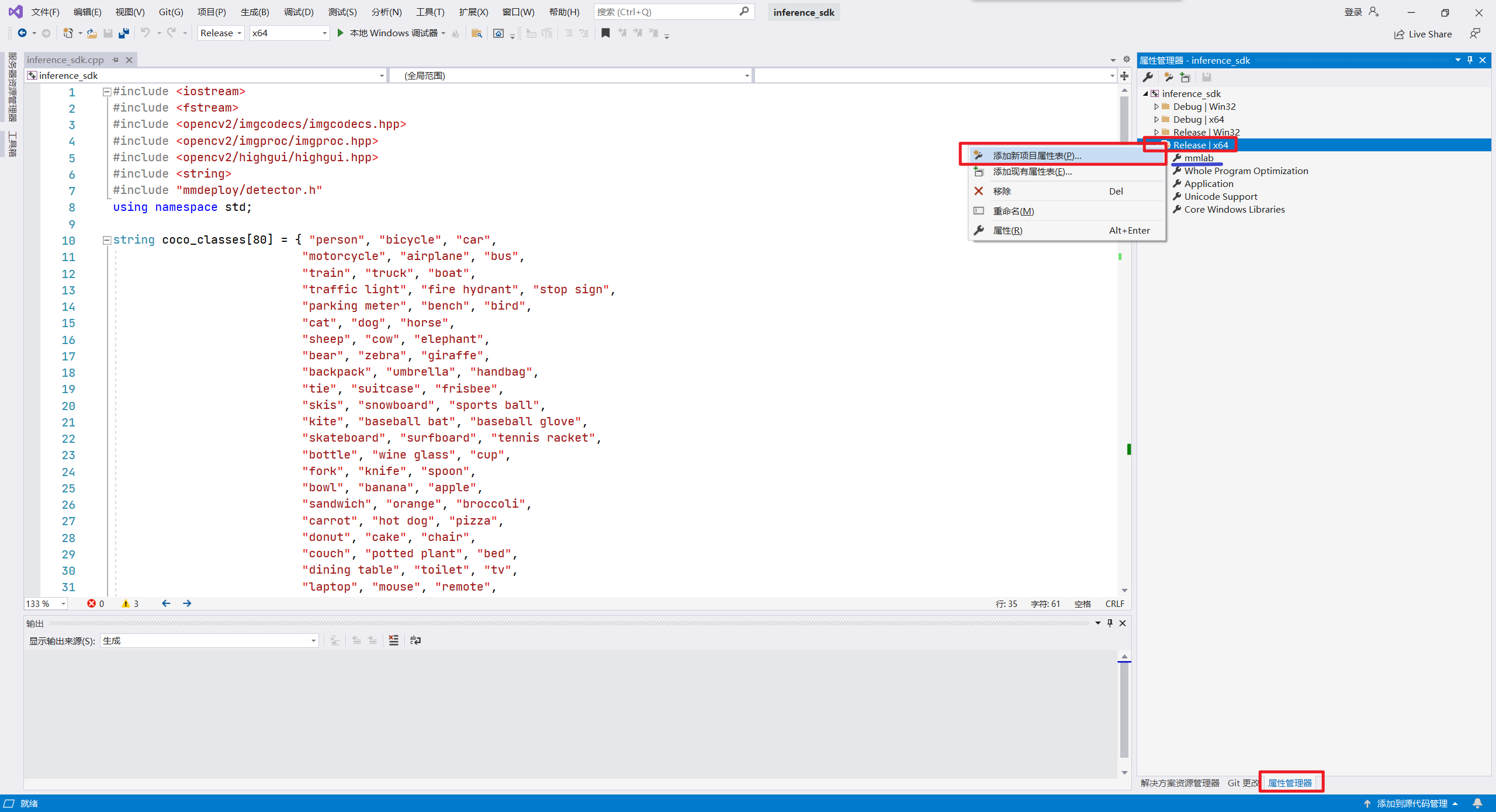
1️⃣ 创建一个控制台应用,并起名inference_sdk(有自己项目的就在自己项目中直接修改即可,不用这一步)
2️⃣ 右下角属性管理器,右击Release |x64,因为我们编译mmdeploy时用的Release x64,这个要对应,新建一个项目属性表,起名mmlab。
3️⃣ 双击打开mmlab属性表,
🔸 VC++ 目录 --> 包含目录 --> 添加
F:\gy77\mmdeploy\build\install\include F:\env\opencv455\opencv\build\include\opencv2 F:\env\opencv455\opencv\build\include\opencv F:\env\opencv455\opencv\build\include- 1
- 2
- 3
- 4
🔸 链接器 --> 输入 --> 附加依赖项。根据自己的目录修改,第一个是opencv目录。(当然也可以通过在VC++里添加库目录,然后在链接器输入里加lib文件)
F:\env\opencv455\opencv\build\x64\vc15\lib\opencv_world455.lib F:\gy77\mmdeploy\build\install\example\build\Release\object_detection_loader.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_opencv_utils.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_classifier.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_detector.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_segmentor.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_text_detector.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_text_recognizer.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_restorer.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_pose_detector.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_rotated_detector.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_pipeline.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_model.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_executor.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_common.lib F:\gy77\mmdeploy\build\install\lib\mmdeploy_core.lib F:\gy77\mmdeploy\build\install\lib\spdlog.lib- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
🔸 链接器 --> 命令行 --> 其他选项:
%(AdditionalOptions) /machine:x64 /WHOLEARCHIVE:object_detection_loader- 1
编写代码
在解决方案资源管理器,源文件中,修改
inference_sdk.cpp,内容如下:#include#include #include #include #include #include #include "mmdeploy/detector.h" using namespace std; string coco_classes[80] = {"person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light", "fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow", "elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee", "skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard", "tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple", "sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch", "potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard", "cell phone", "microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear", "hair drier", "toothbrush"}; int main() { // init const char *device_name = "cuda"; const char *model_path = "F:\\gy77\\mmdeploy\\mmdeploy_models\\yolox_s"; const char *img_path = "F:\\imgs\\demo.jpg"; mmdeploy_detector_t detector{}; mmdeploy_detection_t *bboxes{}; int *res_count{}; int status{}; int max_res_count = 10; status = mmdeploy_detector_create_by_path(model_path, device_name, 0, &detector); if (status != MMDEPLOY_SUCCESS) { fprintf(stderr, "failed to create detector, code: %d\n", (int) status); return 1; } // load image clock_t t0 = clock(); cv::Mat img = cv::imread(img_path); mmdeploy_mat_t mat{ img.data, img.rows, img.cols, 3, MMDEPLOY_PIXEL_FORMAT_BGR, MMDEPLOY_DATA_TYPE_UINT8}; // inference clock_t t1 = clock(); status = mmdeploy_detector_apply(detector, &mat, 1, &bboxes, &res_count); clock_t t2 = clock(); for (int i = 0; i < max_res_count; ++i) { const auto &box = bboxes[i].bbox; const auto &mask = bboxes[i].mask; // skip detections with invalid bbox size (bbox height or width < 1) if ((box.right - box.left) < 1 || (box.bottom - box.top) < 1) { continue; } // skip detections less than specified score threshold if (bboxes[i].score < 0.3) { continue; } cv::rectangle(img, cv::Point{(int) box.left, (int) box.top}, cv::Point{(int) box.right, (int) box.bottom}, cv::Scalar{0, 255, 0}, 2); cv::putText(img, coco_classes[bboxes[i].label_id] + ":" + std::to_string(bboxes[i].score), cv::Point{(int) box.left, (int) box.top}, cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar{0, 0, 255}, 2); } //show image cv::imshow("img", img); clock_t t3 = clock(); cout << "load image cost time: " << (t1 - t0) / (double) CLOCKS_PER_SEC << "s" << endl; cout << "mmdeploy_detector_apply cost time" << (double) (t2 - t1) / CLOCKS_PER_SEC << "s" << endl; cout << "cv::imshow cost time" << (double) (t3 - t2) / CLOCKS_PER_SEC << "s" << endl; cv::waitKey(0); cv::destroyAllWindows(); return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
结果展示:
log:
loading mmdeploy_execution ... loading mmdeploy_cpu_device ... loading mmdeploy_cuda_device ... loading mmdeploy_graph ... loading mmdeploy_directory_model ... [2022-08-01 12:33:53.232] [mmdeploy] [info] [model.cpp:95] Register 'DirectoryModel' loading mmdeploy_transform ... loading mmdeploy_cpu_transform_impl ... loading mmdeploy_cuda_transform_impl ... loading mmdeploy_transform_module ... loading mmdeploy_trt_net ... loading mmdeploy_net_module ... loading mmdeploy_mmcls ... loading mmdeploy_mmdet ... loading mmdeploy_mmseg ... loading mmdeploy_mmocr ... loading mmdeploy_mmedit ... loading mmdeploy_mmpose ... loading mmdeploy_mmrotate ... [2022-08-01 12:33:53.293] [mmdeploy] [info] [model.cpp:38] DirectoryModel successfully load model F:\gy77\mmdeploy\mmdeploy_models\yolox_s [2022-08-01 12:33:53.928] [mmdeploy] [warning] [trt_net.cpp:24] TRTNet: Using an engine plan file across different models of devices is not recommended and is likely to affect performance or even cause errors. [2022-08-01 12:33:54.503] [mmdeploy] [warning] [trt_net.cpp:24] TRTNet: TensorRT was linked against cuBLAS/cuBLAS LT 11.6.3 but loaded cuBLAS/cuBLAS LT 11.2.1 [2022-08-01 12:33:55.109] [mmdeploy] [warning] [trt_net.cpp:24] TRTNet: TensorRT was linked against cuBLAS/cuBLAS LT 11.6.3 but loaded cuBLAS/cuBLAS LT 11.2.1 load image cost time: 0.018s mmdeploy_detector_apply cost time0.019s cv::imshow cost time0.029s- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
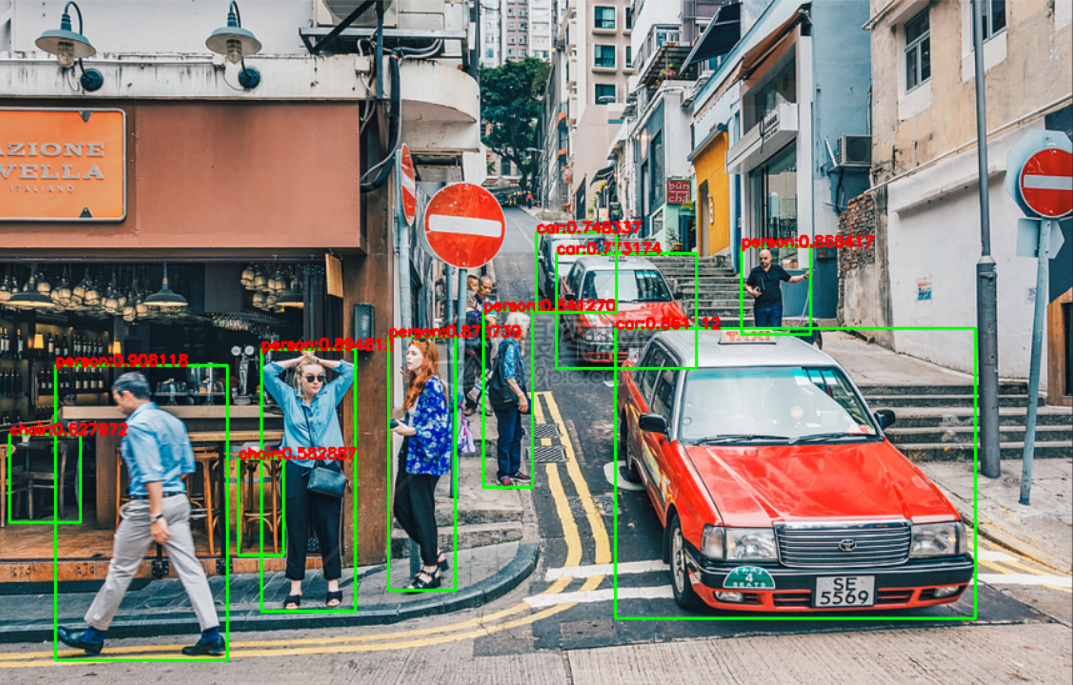
图片推理结果:

-
相关阅读:
系统架构师笔记——计算机网络
面试:Android中的HOOK方案
电子制造仓储条码管理系统解决方案
SwiftUI 动态岛开发教程之02 iPhone 14 Pro 如何使用 Dynamic Island
意大利Eni公司将与法国PASQAL公司共同研究能源量子计算
高并发场景下,6种方案,保证缓存和数据库的最终一致性!
ctf之流量分析学习
【面试】JAVA四种引用 -强引用、软引用、弱引用、虚引用
C++类对象所占内存空间大小分析
SSM框架-MyBatis基础
- 原文地址:https://blog.csdn.net/qq_39435411/article/details/126100059
