-
GEE开发之Sentinel-2计算NDVI和数据分析
GEE开发之Sentinel-2计算NDVI和数据分析
前言:主要介绍哨兵2号卫星下计算NDVI的值、遥感影像和数据的获取。
1 基础知识
Sentinel-2:中文名哨兵2号卫星。
- Sentinel-2是一种宽测绘带、高分辨率、多光谱成像任务,支持哥白尼土地监测研究,包括植被、土壤和水覆盖的监测,以及内陆水道和沿海地区的观察。
- Sentinel-2 L2数据从scihub下载。它们是通过运行sen2cor计算的。警告:ESA没有为所有一级资产生成二级数据,早期的二级覆盖范围不是全局的。
- 这些资源包含12个UINT16光谱带,代表按10000缩放的SR(与L1数据不同,没有B10)。还有几个L2特定的频段(有关详细信息,请参阅频段列表)。有关详细信息,请参阅Sentinel-2用户手册。此外,存在三个QA频带,其中一个(QA60)是具有云掩码信息的位掩码频带。有关更多详细信息,请参阅如何计算云遮罩的完整解释。
- Sentinel-2 L2资产的EE资产ID具有以下格式:哥白尼/S2\U SR/20151128 002653\U 20151128 102149\U T56MNN。这里,第一个数字部分表示感应日期和时间,第二个数字部分代表产品生成日期和时间。最后一个6个字符的字符串是一个唯一的颗粒标识符,指示其UTM网格参考(请参阅MGRS)。
NDVI的计算公式:NDVI = (近红外波段 - 红波段) / (近红外波段 + 红波段)
针对每种卫星的波段,选用的波段都有所不同,公式如下:- Landsat8: NDVI = (band5 - band4) / (band5 + band4)
- Sentinel2: NDVI = (band8 - band4) / (band8 + band4)
- Modis: NDVI = (band2 - band1) / (band2 + band1)
- ETM/TM: NDVI = (band4 - band3) / (band4 + band3)
- AVHRR: NDVI = (CH2 - CH1) / (CH2 + CH1)
2 影像、数据、变化趋势实现
代码如下(以鹿邑县为例)
//以鹿邑县为例子 var geometry = ee.FeatureCollection('users/www1573979951/luyixian') Map.centerObject(geometry,7) //颜色设置 var colorizedVis = { min: -0.8, max: 0.8, palette: ['blue', 'white', 'green'], }; //使用QA波段去云 function maskS2clouds(image) { var qa = image.select('QA60'); // Bits 10 and 11 are clouds and cirrus, respectively. var cloudBitMask = 1 << 10; var cirrusBitMask = 1 << 11; // Both flags should be set to zero, indicating clear conditions. var mask = qa.bitwiseAnd(cloudBitMask).eq(0) .and(qa.bitwiseAnd(cirrusBitMask).eq(0)); return image.updateMask(mask).divide(10000).set(image.toDictionary(image.propertyNames())); } //NDVI的计算公式 function createNDVI(image){ var ndvi = image.normalizedDifference(["B8","B4"]).rename('NDVI'); return image.addBands(ndvi); } //特别注意的是,在数学变换之后,保持原始影像的属性,所以这里.set(image.toDictionary(image.propertyNames())); var S2_COL = ee.ImageCollection("COPERNICUS/S2") .filterDate("2020-01-01", "2020-12-31") .filter(ee.Filter.lt('CLOUDY_PIXEL_PERCENTAGE',20)) .filterBounds(geometry) .map(maskS2clouds) .map(createNDVI) .select('NDVI'); print(S2_COL) Map.addLayer(S2_COL.mean().clip(geometry), colorizedVis, 'col'); //趋势线代码 var S2_chart = ui.Chart.image.series({ imageCollection: S2_COL.select('NDVI'), region: geometry, reducer: ee.Reducer.mean(), scale: 500 }).setOptions({ interpolateNulls: true, lineWidth: 2, title: 'NDVI Time Seires', vAxis: {title: 'NDVI'}, hAxis: {title: 'Date'}, trendlines: { 0: {title: 'NDVI_trend',type:'linear', showR2: true, color:'red', visibleInLegend: true}} }); print(S2_chart);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
遥感影像截图:

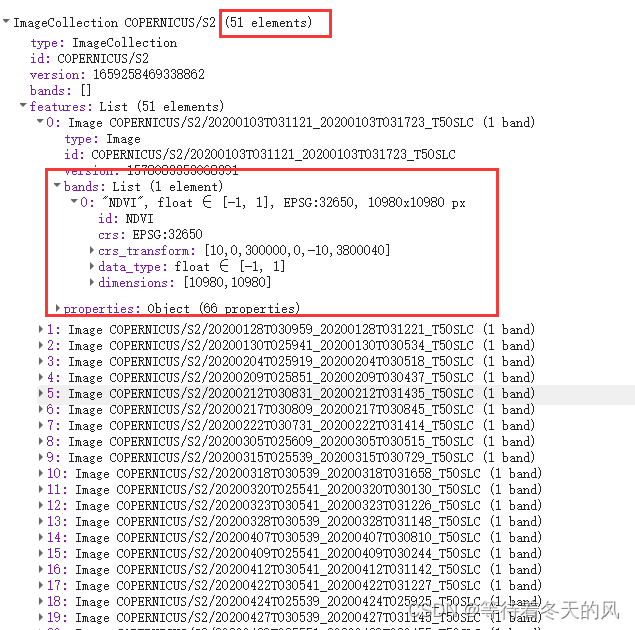
数据集截图(51个数据集):
表格数据以及变化趋势截图:

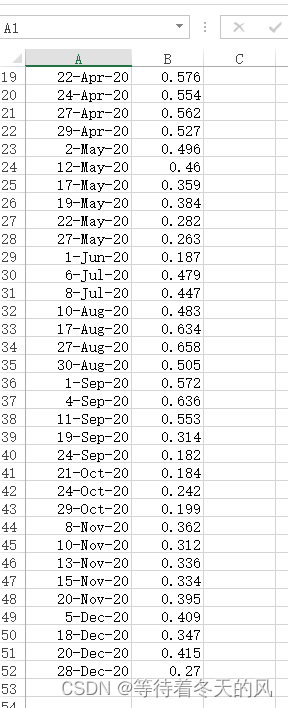
CSV数据:
3 月平均数据的变化趋势
代码如下(以鹿邑县为例):
//以鹿邑县为例子 var geometry = ee.FeatureCollection('users/www1573979951/luyixian') Map.centerObject(geometry,7) //颜色设置 var colorizedVis = { min: -0.8, max: 0.8, palette: ['blue', 'white', 'green'], }; //使用QA波段去云 function maskS2clouds(image) { var qa = image.select('QA60'); // Bits 10 and 11 are clouds and cirrus, respectively. var cloudBitMask = 1 << 10; var cirrusBitMask = 1 << 11; // Both flags should be set to zero, indicating clear conditions. var mask = qa.bitwiseAnd(cloudBitMask).eq(0) .and(qa.bitwiseAnd(cirrusBitMask).eq(0)); return image.updateMask(mask).divide(10000).set(image.toDictionary(image.propertyNames())); } //NDVI的计算公式 function createNDVI(image){ var ndvi = image.normalizedDifference(["B8","B4"]).rename('NDVI'); return image.addBands(ndvi); } //特别注意的是,在数学变换之后,保持原始影像的属性,所以这里.set(image.toDictionary(image.propertyNames())); var S2_COL = ee.ImageCollection("COPERNICUS/S2") .filterDate("2020-01-01", "2020-12-31") .filter(ee.Filter.lt('CLOUDY_PIXEL_PERCENTAGE',20)) .filterBounds(geometry) .map(maskS2clouds) .map(createNDVI) .select('NDVI'); print(S2_COL) Map.addLayer(S2_COL.median().clip(geometry), colorizedVis, 'col'); var years = ee.List.sequence(2020, 2020); var months = ee.List.sequence(1, 12); var S2_monthlymeanNDVI = ee.ImageCollection.fromImages( years.map(function (y) { return months.map(function(m) { return S2_COL.filter(ee.Filter.calendarRange(y,y, 'year')).filter(ee.Filter.calendarRange(m, m, 'month')).mean().set('year', y).set('month', m).set('system:time_start', ee.Date.fromYMD(y, m, 1)); }); }).flatten() ); // Create a monthly time series chart. var plotNDVI = ui.Chart.image.seriesByRegion(S2_monthlymeanNDVI, geometry,ee.Reducer.mean(), 'NDVI',500,'system:time_start') .setChartType('LineChart').setOptions({ interpolateNulls: true, title: 'NDVI Monthly time series', hAxis: {title: 'Date'}, vAxis: {title: 'NDVI',viewWindowMode: 'explicit', viewWindow: {max: 0.7,min: 0.3,},gridlines: {count: 10,}}, trendlines: { 0: {title: 'NDVI_trend',type:'linear', showR2: true, color:'red', visibleInLegend: true}}}); // Display. print(plotNDVI);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
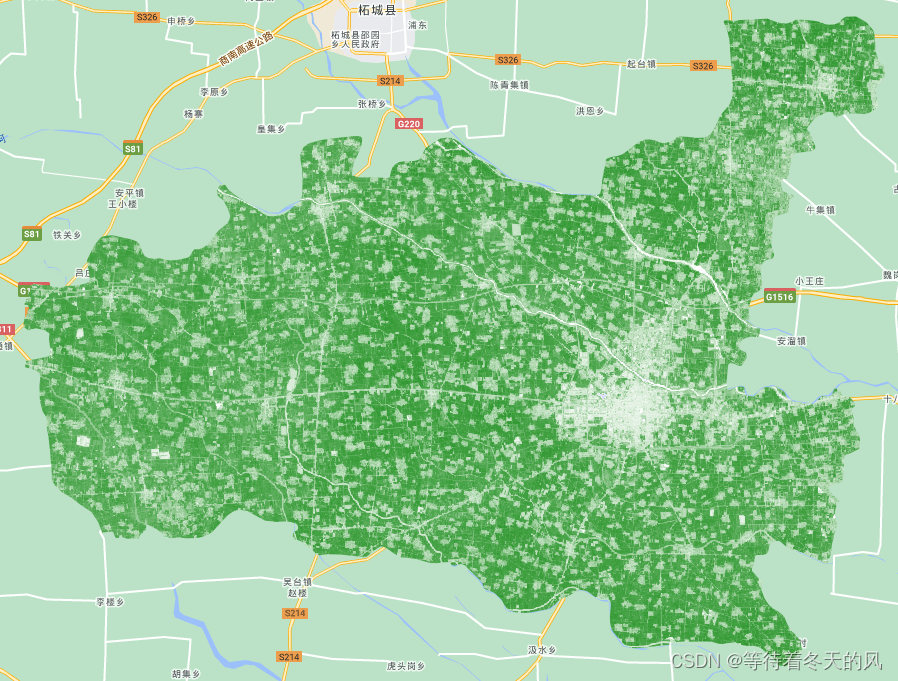
影像截图:
表格变化趋势图:

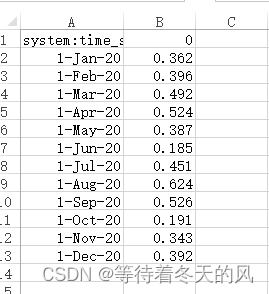
CSV数据截图:
-
相关阅读:
VS Code打开新的文件夹,会覆盖原来的文件夹。如何保持原来的文件夹并新打开一个窗口
Vue实现无限滚动加载更多内容(懒加载)或实现查看更多按钮
Python中的并发编程(5)PyQt 多线程
docker网络与docker自定义网络建立
Vscode-Git graph怎么看?
计算机防勒索病毒之主机加固核心要点
Lua-http库写一个爬虫程序怎么样 ?
Chapter 02 - Let's Get Started(C#篇)
Linux下命令行文件创建删除、目录创建删除
氧化铁载苯乙烯和甲基丙烯酸P(St-MAA)磁性微球/PS微球载纳米铁降解硝基苯的研究制备
- 原文地址:https://blog.csdn.net/qq_32306361/article/details/126087702
