-
多旋翼飞行器设计与控制(三):机架设计
一、布局设计
机身基本布局
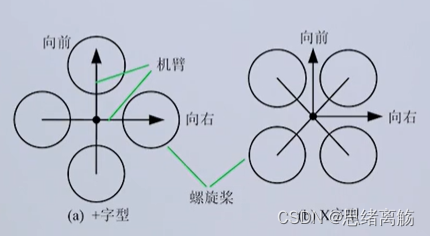
- 交叉型:
按飞行方向与机身关系,又分为+字型和X字型(常用,机动性更强、前视相机的视场角不容易被遮挡)
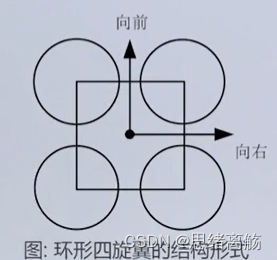
- 环形:
与传统机架相比,其刚性更大,可较大程度的避免飞行中机架所产生的振动,增加了机架结构的强度,但同时也增加了机架的重量,转动惯量,灵活性降低。
旋翼的安装
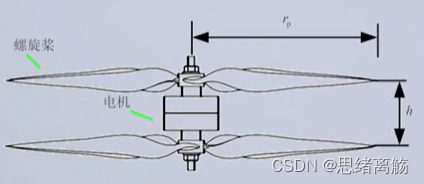
- 单桨和共轴双桨
共轴双桨的优点:不增加多旋翼的整体尺寸、减少螺旋桨对照相机视场的遮挡
注意:共轴双桨会降低单个螺旋桨的效率,大概共轴双桨只相当于1.6个螺旋桨
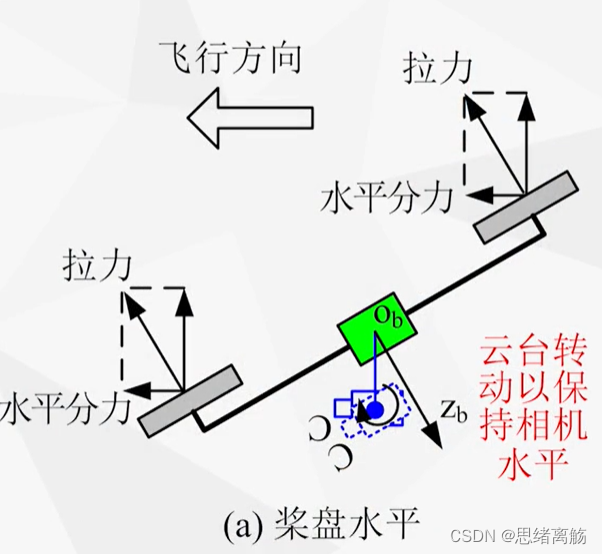
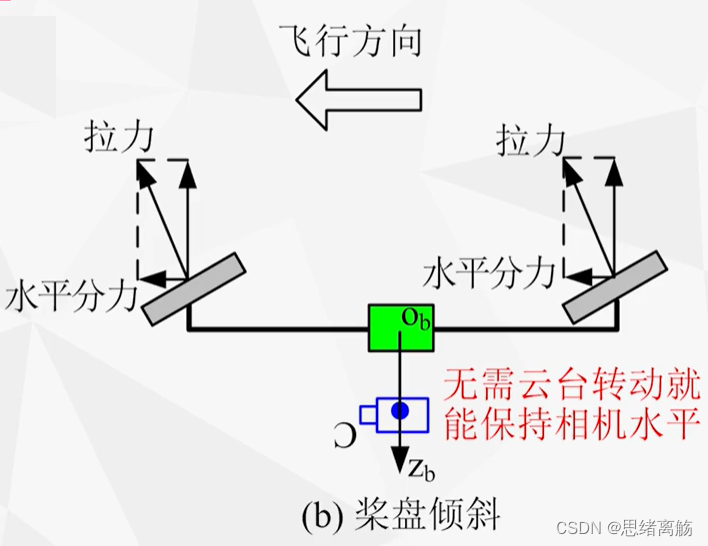
- 桨盘角度
水平装配:
简单,但需要云台使相机保持水平
倾斜装配:
至少六个桨,但无需云台
- 旋翼朝向
桨盘位于机械臂位置上方:螺旋桨产生拉力、着陆阶段不易碰到障碍而损伤桨、遮挡相机视野小。
桨盘位于机械臂位置下方:螺旋桨产生推力、下洗气流完整,防雨,不易影响气压计的高度测量、不脱浆。
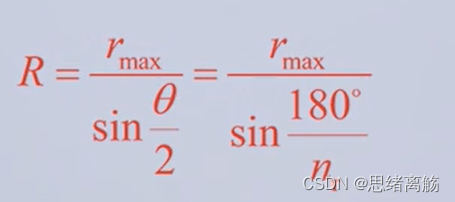
旋翼和机体半径:
Nr旋翼飞行器,机架半径与旋翼最大半径Rmax存在如下关系(θ表示轴间夹角)
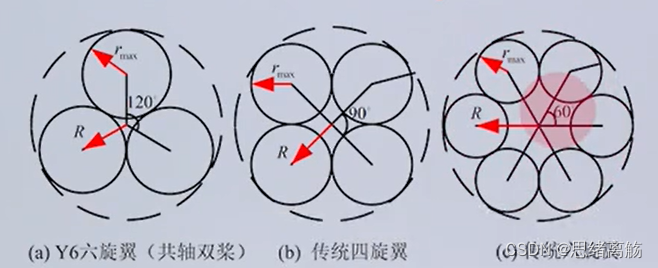
实验表明,当桨与桨之间的距离从一个桨半径到0.1个桨半径变化时,气流对于飞行器整体性能的影响很小,因此,为了使飞行器尽量紧凑,比如可令:

尺寸和机动性关系:
- 减少多旋翼机体尺寸对多旋翼惯性、有效负载具有很大影响,并最终影响最大可达角加速度和线加速度。
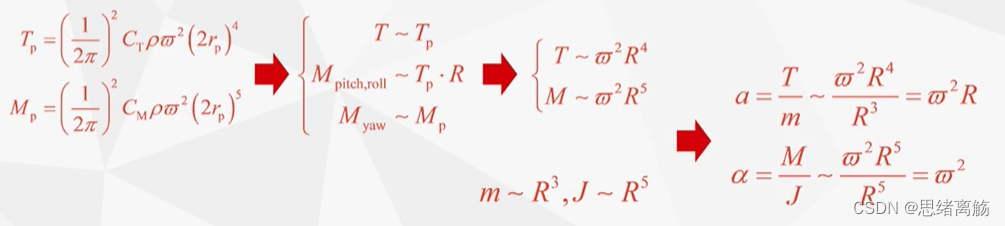
- 马赫数尺度限制
- 弗劳德数尺度限制
总结可得:尺寸越大机动性越差
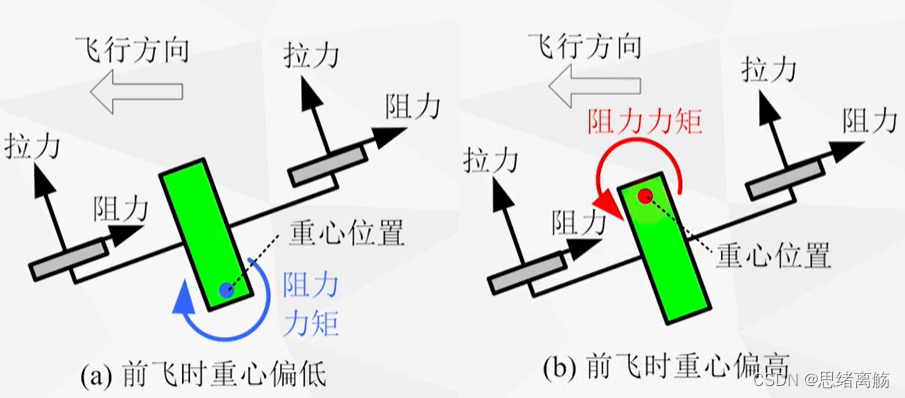
重心位置:
在设计时,需要将重心设计到多旋翼的中心轴上

在前飞时,诱导的来流会产生平行于桨盘平面的阻力。
如果多旋翼重心在桨盘平面下方,那么阻力形成的力矩会促使多旋翼俯仰角转向0度方向。
如果多旋翼重心在桨盘平面上方,那么阻力形成的力矩会促使多旋翼俯仰角朝发散方向发展,直至翻转。
因此在多旋翼前飞时,重心在桨盘平面下方会使前飞运动稳定。
当阵风吹来,诱导的来流会产生平行于桨盘平面的阻力。
如果多旋翼重心在下,那么阻力形成的力矩会促使多旋翼俯仰角朝发散的方向发展,直至翻转。
如果多旋翼重心在上,那么阻力形成的力矩会促使多旋翼俯仰角朝0度方向发展。
因此当多旋翼受到外界风干扰时,重心在桨盘平面上方可以抑制扰动。

从上面2点我们可以看出,无论重心在桨盘平面上方或下方,都不能使多旋翼稳定,需要通过反馈控制将多旋翼平衡,然而如果重心在桨盘平面很靠上的位置,会使多旋翼某个运动模态很不稳定,因此,实际中建议将重心配置在飞行器桨盘平面中心,或根据需求可以稍微靠下。这样控制器控制起来更容易些。自驾仪安装位置:
理想位置应在多旋翼中心。若自驾仪离飞行器中心较远,由于存在离心加速度和切向加速度,将会引起加速度计的测量误差,即“杆臂效应”。
- 标准安装方位:

- 代用安装方位:
Pixhawk/APM2自驾仪可在超过30度角的方位安装在机架上,可通过相应的软件设置重新得到自驾仪安装在机体上的标准方位。
气动布局:
- 对外形进行设计的主要是为了降低飞行时的阻力,按其产生的原因不同,可分为:摩擦阻力、压差阻力、诱导阻力、干扰阻力。
- 设计建议:a.需要考虑多旋翼前飞时的倾角,减少最大迎风面积;b.设计流线型机身;c.考虑和安排各部件之间的相对位置关系,部件连接处尽量圆滑过渡,飞机表面也要尽量光滑;d.通过CFD仿真计算阻力系数,不断优化。
二、结构设计
机体基本设计原则
- 刚度、强度满足负载要求,机体不会发生晃动、弯曲
- 满足其他设计原则下,重量越轻越好。
- 合适的长宽高比,各轴间距、结构布局适宜
- 飞行过程中满足其他设计原则下,保证机体振动越小越好
- 美观耐用
减振设计
- 意义:
飞行板上的加速度传感器对于振动十分敏感:a.加速度信号直接关系到姿态角和姿态角速率的估计,b.飞控程序融合了加速度计和气压计、GPS数据来估计飞行器的位置
减震的另外一个重要作用是提高成像的质量:这对于多旋翼的小型化至关重要 - 振动的主要来源
机体振动主要来源于机架变形、电机和螺旋桨不对称。
机架
机壁的刚度越大越好;
一般的碳纤维多旋翼机架具有足够的抗扭特性和抗弯特性;
铝制机架刚性更好,但更重;
要保证电机与机臂的安装连接,以及机臂与控制云台的安装连接是安全可靠的,并具有一定的减震缓冲效果。
电机
电机能够平滑稳定运行;
桨夹需要和电机轴承、螺旋桨中心共轴,避免电机转动时产生偏心力;
电机平衡。
螺旋桨(最主要来源)
螺旋桨平衡调节器
螺旋桨应匹配机架型号和机体重量,并在顺逆时针旋转时具有相同的韧性
碳纤维螺旋桨合适,但它的刚度较大,旋转时存在安全隐患
低速大螺旋桨相比高速小桨效率更高,但是振动幅度较大 - 振动强度约束
a.一般在多旋翼横向振动强度低于0.3g,在纵向振动要求低于0.5g。
b.实际工程中要求所有轴振动强度在±0.1g之间. - 自驾仪与机架的隔振
a.双面泡沫胶带和尼龙扣
b. Dubro泡沫、凝胶垫、O型环悬挂安装和耳塞式安装等
c.飞控减振器

减噪设计
- 螺旋桨噪声的主要危害
a.各灵敏传感器可能会受到噪声的影响而失真
b.噪声影响周围飞行环境,产生噪声污染
c.诱发的机体结构振动与声疲劳,有可能严重影响飞机的安全性
d.小型多旋翼出于隐秘侦查的需求,需要保持飞行时的足够安静 - 螺旋桨发声原理
a.旋转噪声:厚度噪声、负载噪声
b.宽带噪声:螺旋桨的宽带噪声是由桨叶与湍流之间相互作用产生的桨叶负载随机变化引起 - 减噪措施
a.对于多旋翼来说,增大桨距或者桨叶直径会减弱桨叶叶尖失速产生的噪声
b.通过减小桨叶的总体积,我们就可以减少桨叶剖面的相对厚度和弦长,从而大幅度降低厚度噪声
c.对于给定的拉力设计要求,增加螺旋桨叶数可以减小叶片尺寸和转速,从而降低翼尖相对马赫数,减弱叶片的噪声辐射
d.通过设计改进桨叶形状,将噪声功率向内径方向移动来实现降噪
e.机载的声传感器可以探测到某个螺旋桨所产生的噪声,通过闭环反馈,系统可以利用另外一个螺旋桨进行相应的抗噪,从而抵消所产生的噪声
- 交叉型:
-
相关阅读:
在微信公众号怎么实现答题活动
JSONP的安全性较差,那么在跨域情况下,有没有其他更安全的替代方案呢?
【深度思考】如何优雅的实现脱敏?
【经济调度】基于蝙蝠算法实现电力系统经济调度附Matlab代码
【Leetcode】573. Squirrel Simulation
C++的学习
NEWCC:新时代的区块链生态新币私募造势平台
yolov1模型
基于python tornado实现的简易图床
闭包和回调函数
- 原文地址:https://blog.csdn.net/kakiyaminuociyin/article/details/125975810