-
【物理模拟】PBD算法详解
参考:
Matthia Muller的十分钟物理(他就是PBD算法的发明者)
https://matthias-research.github.io/pages/tenMinutePhysics/原理
PBD的算法主体分为三步:
- 根据外力更新粒子速度位置,无需考虑粒子间关系
- 求解约束,使粒子满足粒子间关系
- 更新粒子的位置,并反向更新速度
由于第3步是先求出粒子位置,再反求速度的。因此它是基于位置的方法,故被称为position based dynamics。
PBD是纯粒子法。在PBD的世界中,只有粒子。其他的一切(三角面、四面体等)都是辅助性的。

1. 根据外力更新粒子速度位置,无需考虑粒子间关系
如图,先根据外力更新速度(这里只考虑了重力)
然后把旧的位置存到p中
最后利用速度更新位置
(如果有碰撞,也在这里处理)
整个过程粒子无需考虑相互关系。

2. 求解约束,使粒子满足粒子间关系
我们分两种情况:一种是最简单的二维情况,一种是三维情况。
我们先从简单的二维情况来:
二维情况:一个弹簧
我们只考虑一个弹簧的约束
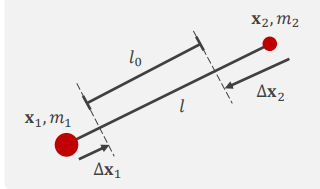
这个弹簧只有两个质点和中间的一个边。质点具有位置和质量,边具有原长度和现长度。
随意移动两个粒子,弹簧目前不处于原长。
因此,弹簧要回到原长。
弹簧回到原长,这就是这个系统的约束。
C ( x 1 , x 2 ) = ∣ x 1 − x 2 ∣ − L 0 C(x1, x2) = |x1 - x2| - L0 C(x1,x2)=∣x1−x2∣−L0
其中x1, x2分别是粒子1和粒子2的位置。L0是原长。如何让系统满足约束呢?
所谓的满足约束,就是让约束误差等于0。
上面这个式子中的C,就是约束的误差(有时候约束和约束误差这两个词混用)。
通过迭代,让误差趋于0,那就是求解过程。
如何让其趋于0?
那就是求梯度,然后向着梯度减小的方向移动(即所谓的梯度下降思想)。
实际上,从另一个角度来看,梯度就是一维的导数在高维的推广。让导数等于0的位置(即驻点),就是原函数最小化的位置。
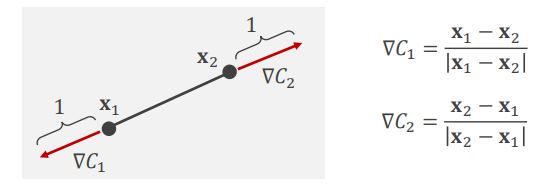
于是我们就找C的梯度。
∇ C 1 = ( x 1 − x 2 ) / ∣ x 1 − x 2 ∣ ∇ C 2 = ( x 2 − x 1 ) / ∣ x 2 − x 1 ∣ \nabla C1 = (x1 - x2) / |x1 - x2| \nabla C2 = (x2 - x1) / |x2 - x1| ∇C1=(x1−x2)/∣x1−x2∣∇C2=(x2−x1)/∣x2−x1∣
我们无需那样严谨地去推导数学公式,然后给出C梯度的表达式。我们直接从物理意义上来理解C梯度。那就是让C函数上涨最快的方向。在这个例子中,也就是x1与x2相对的方向。因此我们给出上面的公式。而且我们这里是归一化了的,只求出一个方向。
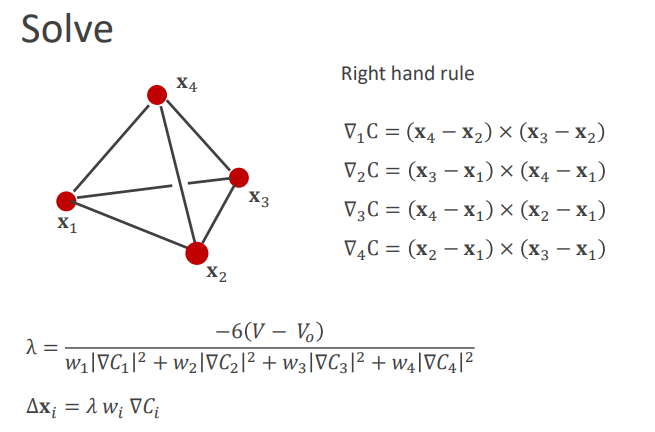
那么大小是多少呢?我们给出如下公式

大小是由系数lambda和质量倒数w决定的。其中lambda的正式名称叫做拉格朗日乘数。那么,我们求解出来了gradC,因此就求解出来了粒子间的相互关系。因此,也就知道粒子为了满足相互关系,该向哪里移动。因此给出了dx(如上图)。这个移动的方向,就是最小化约束误差的方向,就是负梯度的方向(因此lambda分母有个负号)。
三维情况:一个四面体
对于三维,我们期望的约束是四面体的体积保持原体积。
其约束误差就是
C = ( V − V 0 ) C = (V - V0) C=(V−V0)而四面体的体积公式是
1 6 [ ( x 2 − x 1 ) × ( x 3 − x 1 ) ] ⋅ ( x 4 − x 1 ) \frac{1}{6} [(x2 - x1)\times (x3 - x1)] \cdot (x4 - x1) 61[(x2−x1)×(x3−x1)]⋅(x4−x1)
先叉乘求出底面积(叉乘得到的是菱形面积,还要除以2),然后再乘以高度(点乘会消除非垂直部分),再乘以1/3(四面体公式中本来的1/3)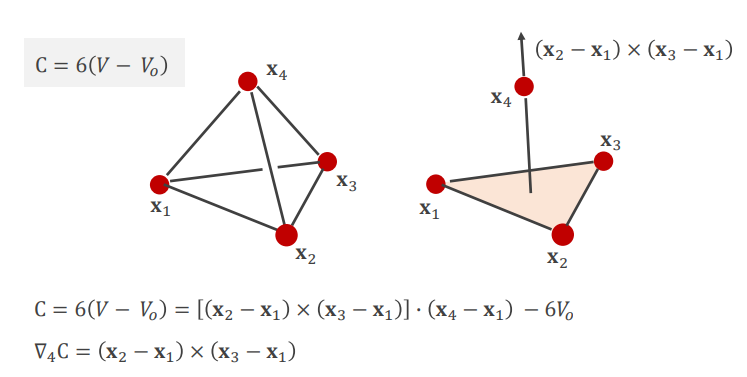
而约束误差的梯度是什么呢?我们仍然跳过数学推导,从物理意义上解释。
梯度即函数增长最快的方向,也就是体积增长最快的方向。对于某个粒子来说,哪个方向让体积增长最快呢?
那就是垂直于底面的方向。
而垂直与底面的方向,就是底面的三角形其中两个边叉乘的方向(叉乘满足右手定则)。
因此
g r a d C 4 = ( x 2 − x 1 ) × ( x 3 − x 1 ) gradC4 = (x2 - x1) \times (x3 - x1) gradC4=(x2−x1)×(x3−x1)
这就是粒子4所对应约束的梯度。那么大小如何确定呢?
仍然利用拉格朗日乘数lambda。
值得注意的是:
求解一个三维弹性物体,我们必须同时满足弹簧约束和体积约束。体积约束保证弹性体不发生体积的膨胀和缩小,而弹簧约束保证物体上的每个质点回到原位(也就是最终弹性体恢复原状)。代码
我们参考的是
https://matthias-research.github.io/pages/tenMinutePhysics/
中第10讲的代码数据结构:
存储在class SoftBody内。SoftBody可多次实例化以添加多个物体。simulate函数为算法的主体,它分为三步:
- preSolve
- solve
- postSolve
preSolve
for all particles: vel[i] += gravity * dt prevPos[i] = pos[i] pos[i] += vel[i] *dt collision处理:当y<0时把pos挪到0- 1
- 2
- 3
- 4
- 5
solve
又被分为两个部分:
- solveEdge
- solveVolume
也就对应上面说的弹簧约束和体积约束。
solveEdge
for i in all edges: alpha = C/dt^2 grad = pos0- pos1 grad归一化 s = - (L - L0)/(1/m + alpha) pos0[i] += grad * (s/m) pos1[i] += grad * (-s/m)- 1
- 2
- 3
- 4
- 5
- 6
- 7
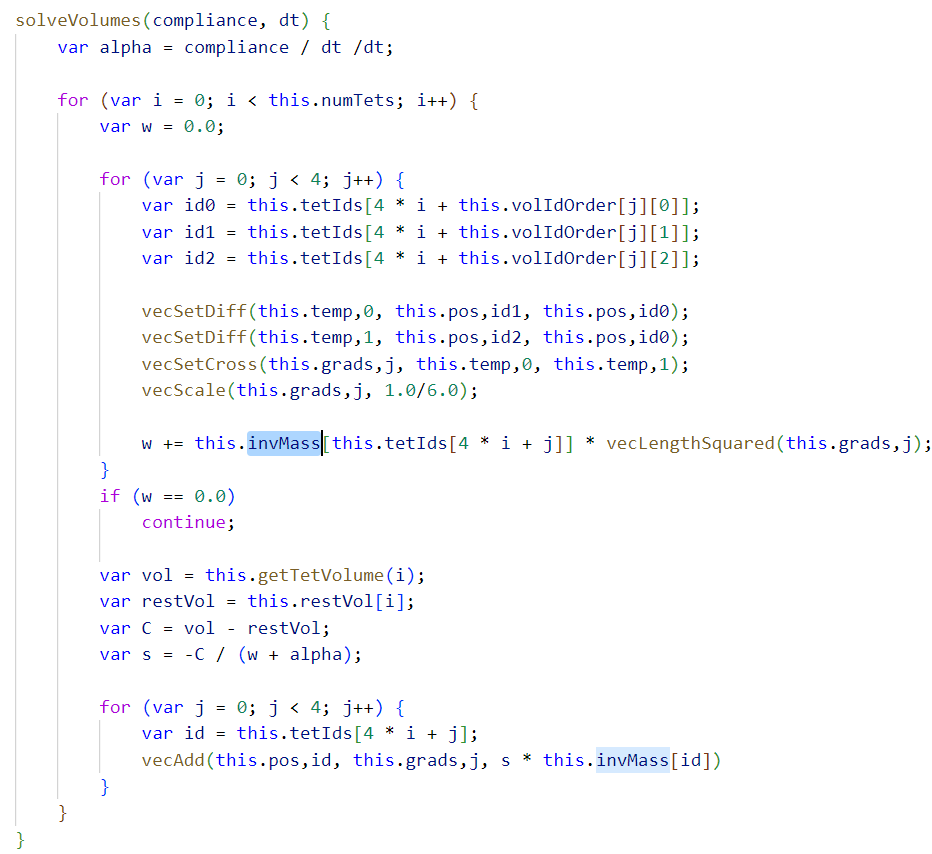
solveVolume
for i in all tets: alpha = C/dt^2 for j in 4: temp0 = pos1 - pos0 temp1 = pos2 - pos0 grad[j] = (1/6) * tem0.cross(temp1) w = sum((1/m) * ||grad[j]||^2 ) s = -(V - V0) / (w + alpha) for j in 4: pos[i] = grad[j] * (s/m)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
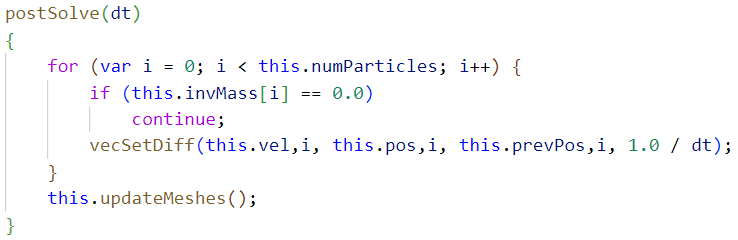
postSolve
for i in all particles: vel[i] = (pos[i] - prevPos[i])/dt- 1
- 2
代码
拷贝自tenMinutePhysics


-
相关阅读:
java中的多线程
7判断环的入口结点8输出倒数第k个
电源硬件设计----升压(Boost)变换器基础
9/7 dp练习+01背包方案数+求背包具体方案
【数据链路层】网络基础 -- MAC帧协议与ARP协议
蓝桥杯嵌入式基础模块——LCD显示器的基本使用(新板)STM32G431(HAL库开发)
CSS简单的图片居中
[附源码]SSM计算机毕业设计基于篮球云网站JAVA
山东大学数字图像处理实验(二)
做好了产品需求管理,PM就不用挨揍了吗?
- 原文地址:https://blog.csdn.net/weixin_43940314/article/details/126065813