-
【ROS小车9】仅用 RPLIDAR A1(思岚 A1) 雷达在 Ubuntu 虚拟机跑 gmapping
1、背景
F1TENTH 平跑车架的底盘还没搞定,想跑一下 ROS 上层应用,刚好发现 gmapping 可以不需要里程计信息、只用激光雷达数据就能建图,因此借底盘还没搞定的机会在虚拟机上跑一下 gmapping。
2、硬件连接
司岚 A1 激光雷达通过串口连接到笔记本的USB接口。就这么简单!一根线就搞定了通信和供电。
虚拟机:Ubuntu 1804
ROS版本: Melodic3、
laser_scan_matcher通过源码安装mkdir -p ~/RPLIDAR_test_ws/src cd ~/RPLIDAR_test_ws/src git clone https://github.com/ccny-ros-pkg/scan_tools.git cd .. catkin_make // 会发现 fail, 此时进入到scan_tools/ 目录下把除laser_scan_matcher 目录之外的所有文件(夹)都删掉。 catkin_make // 此时又报错,看下面的注释解决 catkin_make sudo sh -c 'echo "source /home/jyc/RPLiDAR_test_ws/devel/setup.bash" >> ~/.bashrc'- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
注:
报错如下:

解决:sudo apt-get install ros-melodic-csm- 1
4、测试
roslaunch laser_scan_matcher demo.launch- 1
不过,demo.launch 运行结果是在 rviz 中播放
.bag数据包,我们要使用真实激光雷达(思岚 A1)建图,具体做法见下个标题。5、使用思岚 A1 激光雷达运行 gmapping
在
~/RPLiDAR_test_ws/src/laser_scan_matcher/demo文件夹下,有一个demo_gmapping.launch文件,运行该.launch文件同样是用.bag数据来播放 gmapping 的结果。对这个.launch文件进行修改,用实时的激光数据代替.bag数据,代码如下(可直接复制替换):<launch> #### set up data playback from bag ############################# <include file="$(find rplidar_ros)/launch/rplidar.launch"/> #### publish an example base_link -> laser transform ########### <node pkg="tf" type="static_transform_publisher" name="base_link_to_laser" args="0.0 0.0 0.0 0.0 0.0 0.0 /base_link /laser 40" /> #### start rviz ################################################ <node pkg="rviz" type="rviz" name="rviz" args="-d $(find laser_scan_matcher)/demo/demo_gmapping.rviz"/> #### start the laser scan_matcher ############################## <node pkg="laser_scan_matcher" type="laser_scan_matcher_node" name="laser_scan_matcher_node" output="screen"> <param name="fixed_frame" value = "odom"/> <param name="max_iterations" value="10"/> node> #### start gmapping ############################################ <node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen"> <param name="map_udpate_interval" value="1.0"/> <param name="maxUrange" value="12.0"/> <param name="sigma" value="0.1"/> <param name="kernelSize" value="1"/> <param name="lstep" value="0.15"/> <param name="astep" value="0.15"/> <param name="iterations" value="1"/> <param name="lsigma" value="0.1"/> <param name="ogain" value="3.0"/> <param name="lskip" value="1"/> <param name="srr" value="0.1"/> <param name="srt" value="0.2"/> <param name="str" value="0.1"/> <param name="stt" value="0.2"/> <param name="linearUpdate" value="1.0"/> <param name="angularUpdate" value="0.5"/> <param name="temporalUpdate" value="0.4"/> <param name="resampleThreshold" value="0.5"/> <param name="particles" value="10"/> <param name="xmin" value="-10.0"/> <param name="ymin" value="-10.0"/> <param name="xmax" value="10.0"/> <param name="ymax" value="10.0"/> <param name="delta" value="0.02"/> <param name="llsamplerange" value="0.01"/> <param name="llsamplestep" value="0.05"/> <param name="lasamplerange" value="0.05"/> <param name="lasamplestep" value="0.05"/> node> launch>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
测试 gmapping :
roslaunch laser_scan_matcher demo_gmapping.launch- 1
报错:
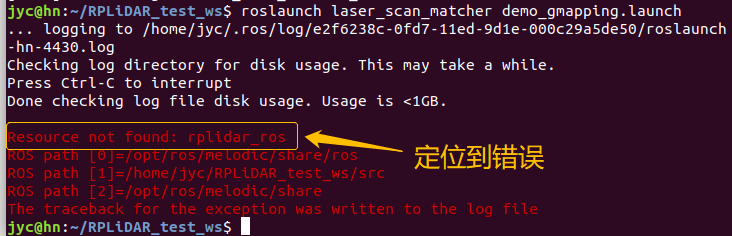
解决:
在~/RPLiDAR_test_ws/src目录下安装rplidar_ros包,并重新在~/RPLiDAR_test_ws目录下编译:cd ~/RPLiDAR_test_ws/src git clone https://github.com/Slamtec/rplidar_ros.git cd .. catkin_make- 1
- 2
- 3
- 4
报错:
[rplidarNode-2] process has died [pid 20367, exit code -6, cmd /home/jyc/RPL

原因:
USB串口的权限不够(我也不能从报错中看出这个端倪,百度到的解决办法,能解决问题就行)
解决:sudo chmod 777 /dev/ttyUSB0- 1
注:
因为虚拟机只连接了激光雷达的这一个串口,因此这个串口被Linux分配的设备名一定是/dev/ttyUSB06、建图效果
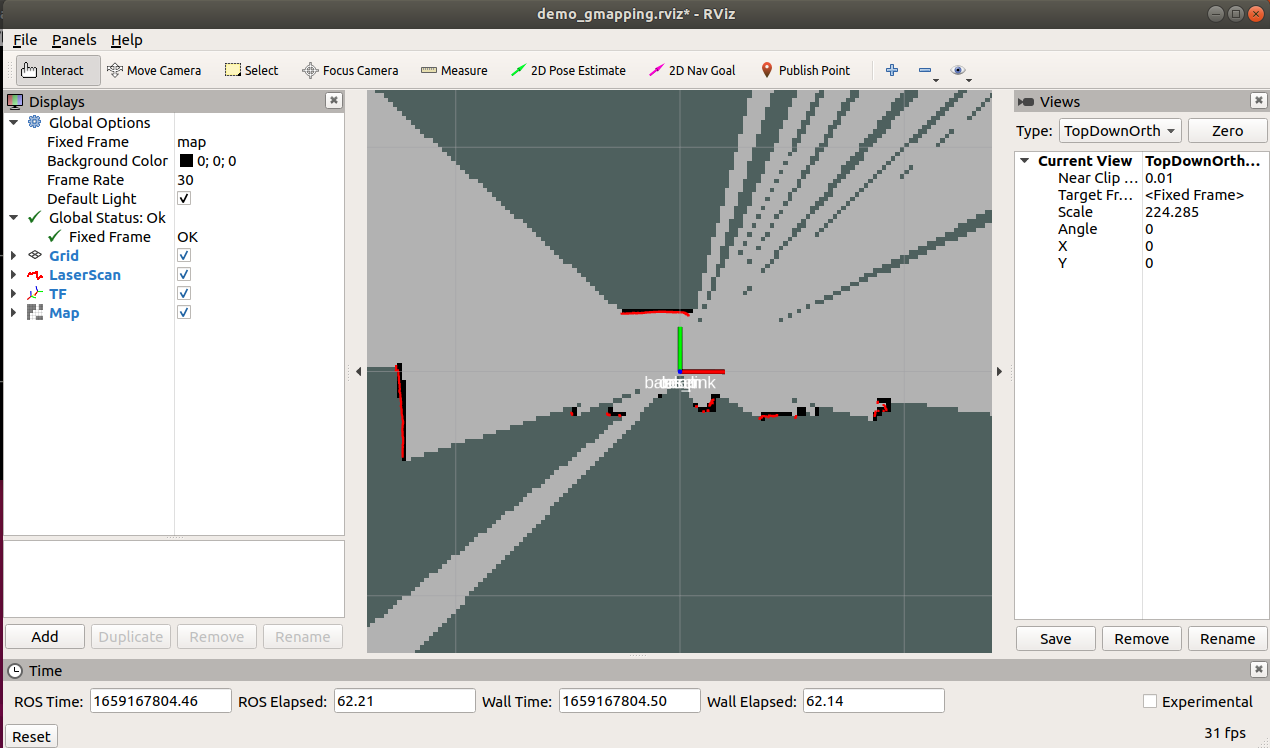
-
相关阅读:
【Delphi】使用TWebBrowser执行JavaScript命令传入JSON参数执行出错解决方案
使用 Gradle 构建 Java 项目
C语言之错误处理
http/2 二进制分帧层 (Binary Framing Layer)讲解
企业电子招投标采购系统源码之电子招投标的组成
java计算机毕业设计springboot+vue大学生竞赛报名系统
53 打家劫舍
Web开发 前端介绍 HTML CSS
2023牛客OI赛前集训营-提高组(第三场) 分糖果
王道计算机考研 操作系统学习笔记 + 完整思维导图篇章三: 内存管理
- 原文地址:https://blog.csdn.net/weixin_42915934/article/details/126072264
