-
python:Möller–Trumbore射线三角面相交算法
Möller–Trumbore射线三角面相交算法(The Möller–Trumbore ray-triangle intersection algorithm) 是一种计算机图形学中经典的算法,用来计算射线和三维空间中三角形的交点。该方法的优点是方法速度快,存储空间少。
输入输出
输入: 给定3维空间中的三个点构成一个三角面片,再给定一个射线起点和方向向量;
输出: 求射线和三角平面在三维空间中的交点。
结果展示
输入: 三角形点[[0, 0, 1], [0, 1, 0], [1, 0, 0]]
方向[2,2,2]
输出: 蓝色交点(0.333,0.333,0.333)

计算权重系数
import numpy as np import pyvista as pv def ray_triangle_intersection(ray_start, ray_vec, triangle): """Moeller–Trumbore intersection algorithm. Parameters ---------- ray_start[n, 3] : np.ndarray Length three numpy array representing start of point. ray_vec : np.ndarray Direction of the ray. triangle : np.ndarray ``3 x 3`` numpy array containing the three vertices of a triangle. Returns ------- bool ``True`` when there is an intersection. tuple Length three tuple containing the distance ``t``, and the intersection in unit triangle ``u``, ``v`` coordinates. When there is no intersection, these values will be: ``[np.nan, np.nan, np.nan]`` """ # define a null intersection null_inter = np.array([np.nan, np.nan, np.nan]) # break down triangle into the individual points v1, v2, v3 = triangle eps = 0.000001 # compute edges edge1 = v2 - v1 edge2 = v3 - v1 pvec = np.cross(ray_vec, edge2) det = edge1.dot(pvec) if abs(det) < eps: # no intersection return False, null_inter inv_det = 1.0 / det tvec = ray_start - v1 u = tvec.dot(pvec) * inv_det if u < 0.0 or u > 1.0: # if not intersection return False, null_inter qvec = np.cross(tvec, edge1) v = ray_vec.dot(qvec) * inv_det if v < 0.0 or u + v > 1.0: # if not intersection return False, null_inter t = edge2.dot(qvec) * inv_det if t < eps: return False, null_inter return True, np.array([t, u, v])- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
主函数,计算交点
# Create a basic triangle within pyvista points = np.array([[0, 0, 1], [0, 1, 0], [1, 0, 0]]) faces = np.array([3, 0, 1, 2])# 三个点,points的0,1,2点 tri = pv.PolyData(points, faces)# faces是空间三角形面,points是三角形顶点 # cast a ray above pointed downwards start = np.array([0, 0, 0]) direction = np.array([2, 2, 2]) # compute if the intersection exists inter, tuv = ray_triangle_intersection(start, direction, points) t, u, v = tuv print('Intersected', inter) print('t:', t) print('u:', u) print('v:', v) a, b, c = (1 - u - v), u, v point = tri.points[0] * a + tri.points[1] * b + tri.points[2] * c print(point)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
可视化
if inter: # reconstruct intersection point in barycentric coordinates. See # https://en.wikipedia.org/wiki/Barycentric_coordinate_system a, b, c = (1 - u - v), u, v point = tri.points[0] * a + tri.points[1] * b + tri.points[2] * c pl = pv.Plotter() pl.add_text(f'Intersected at ({point[0]:.3}, {point[0]:.3}, {point[0]:.3})', font_size=26) pl.add_mesh(tri) _ = pl.add_arrows( np.array([start]), np.array([direction]), show_scalar_bar=False, color='r', style='wireframe', ) pl.add_points(np.array([point]), point_size=20, render_points_as_spheres=True, color='b') pl.add_point_labels(tri, [f'a = {1 - u - v:.3}', f'b = {u:.3}', f'c = {v:.3}'], font_size=40) pl.show_bounds() pl.camera_position = 'xy' pl.show() else: # no intersection pl = pv.Plotter() pl.add_text('No intersection') _ = pl.add_arrows( np.array([start]), np.array([direction]), show_scalar_bar=False, color='r', style='wireframe', ) pl.add_mesh(tri) pl.show_bounds() pl.camera_position = 'xy' pl.show()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
原理
射线的参数: o是射线的起点,D是射线的方向。
如果有一个点从起点o出发,沿着方向D移动任意长度t,到达终点R。如果t不同那么R也不同。通过无数不同的R,我们就能构成整条射线。
如下图所示,射线的起点为P0,沿着方向u前进(红线),P0+tu就构成了整条射线。
通过上述概念,我们可以推广到三角面上,即用两个方向向量|AB|、|AC|和其权重u、v来表示一个空间上的三角形(三个顶点为A,B,C)。
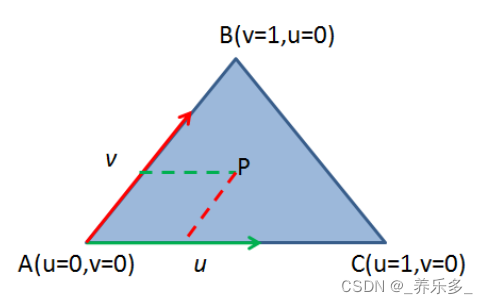
如上图所示,我们给定三角形的参数方程,(1-u-v)V0+uV1+vV2。上图三角形内任意一点都可以由向量和其权重值来表示。比如A点就是在两个方向上移动了0个单位距离。点C在向量|AC|方向移动了1个距离单位。
点P就是沿着AC方向移动了一段距离,又沿着AB移动了一段距离,他们的和向量|AP|就是P点走的方向。
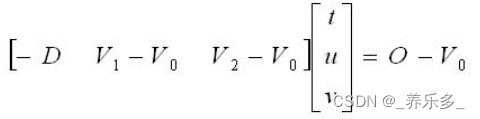
那么三角形内的所有点都由参数u和v控制就可以得到。于是求解射线和三角形的交点就是求解下面方程的未知数t、u、v,其他都是已知的。

表示为线性方程组:
下面解这个方程组,用到两个知识点,一是克莱姆法则,二是向量的混合积。
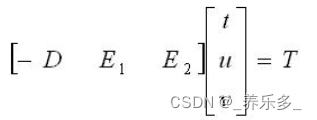
令E1 = V1 - V0,E2 = V2 - V0,T = O - V0,得
根据克莱姆法则,可得到t,u,v的解
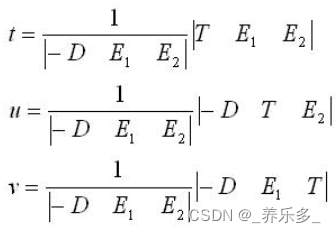
将这三个解联合起来,得

根据混合积公式:

得

令
得:

代码实现:利用numpy计算和pyvista模块可视化
https://docs.pyvista.org/examples/99-advanced/ray-trace-moeller.html -
相关阅读:
2.9 深入GPU硬件架构及运行机制
【推荐系统】wide&deep模型、NeuralCF模型 笔记
【产品面试】产品面试总结出了这三类面试题
一文全面了解:react-antd-admin 如何封装 axios
菁染料CY3/CY5/CY7标记链霉亲和素/胰岛素,CY3/CY5/CY7-Streptavidin/Insulin
【Windows 开发环境配置——NVIDIA 篇】CUDA、cuDNN、TensorRT 三件套安装
JAVA使用wkhtml 将html转成pdf或Image文件
【AUTOSAR-CanSM】-2.5-参数CanSMBorTxConfirmationPolling详解
2112. The Airport With the Most Traffic
ArcGIS Pro矢量(shp)裁栅格(tif)
- 原文地址:https://blog.csdn.net/qq_35591253/article/details/126055175