-
【ROS进阶篇】第十一讲 基于Gazebo和Rviz的机器人联合仿真(运动控制与传感器)
【ROS进阶篇】基于Gazebo和Rviz的机器人联合仿真(运动控制与传感器)
前言
在上一节博客中我们系统的学习了如何使用Gazebo对使用URDF文件完成的机器人模型进行集成仿真,从基本的仿真流程出发,在后续给出了具体的机器人实例,并在最后附上了使用Gazebo创建仿真环境的教程,本节内容主要针对于使用URDF、Gazebo、Rviz进行联合仿真,URDF 用于创建机器人模型、Rviz 可以显示机器人感知到的环境信息,Gazebo 用于仿真,可以模拟外界环境,以及机器人传感器,,本节内容则更加聚焦于使用Gazebo模拟传感器数据,并在Rviz中完成显示和分析。

一、机器人运动控制(ros_control)
1. 组件介绍
- 引入原因:在RVIZ中,我们通过Arbotix辅助实现了对于基于URDF文件的机器人模型的运动控制,而在Gazebo仿真中,虽然我们已经建立了具体的仿真环境,但是想要真正控制机器人运动,也需要着一个关键组件包。

-
应用场景:同样的ROS程序部署与不同的实际具体机器人系统上。
-
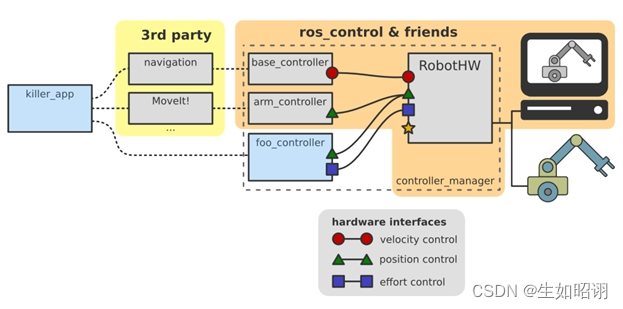
介绍:ROS_CONTROL,是一组软件包,包含控制器、管理器、硬件、传输等接口,本质上是一个控制中间件,提供了一套规范,除了这些,ros_control还提供了一个硬件的抽象层,用于负责硬件资源管理,controller从抽象层请求资源即可。
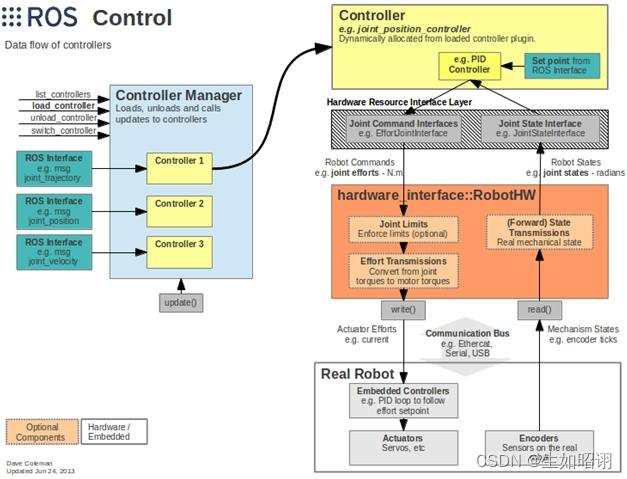
- 各数据流层功能介绍:
- Controller Manager:
每个机器人可能有多个controller,所以这里有一个控制器管理器的概念,提供一种通用的接口来管理不同的controller。controller manager的输入就是ROS上层应用的输出。 - Controller:
完成每个joint的控制,请求下层的硬件资源,提供了PID控制器,读取硬件资源接口中的状态,在发布控制命令。 - Hardware Rescource:
为上下两层提供硬件资源的接口。 - RobotHW:
硬件抽象层和硬件直接打交道,通过write和read方法来完成硬件的操作,这一层也包含关节限位、力矩转换、状态转换等功能。 - Real Robot:
实际的机器人上也需要有自己的嵌入式控制器,接收到命令后需要反映到执行器上,比如接收到位置1的命令后,那就需要让执行器快速、稳定的到达位置1。
- 特点:对于不同的机器人平台来说,ros_control提供了一个标准的规范接口架构,提高了程序的兼容性、涉及效率与灵活可移植性,使用时直接调用gazebo中的相关接口即可。
2. 运动控制实现
- 基本流程:
- 创建机器人模型;
- 编写一个单独的xacro文件,添加传动装置及控制器,并集成到一起;
- 启动Gazebo发布/cmd_vel消息控制运动
- 基本机器人URDF文件略,传动、控制文件实例如下:
<robot name="my_car_move" xmlns:xacro="http://wiki.ros.org/xacro"> <xacro:macro name="joint_trans" params="joint_name"> <transmission name="${joint_name}_trans"> <type>transmission_interface/SimpleTransmissiontype> <joint name="${joint_name}"> <hardwareInterface>hardware_interface/VelocityJointInterfacehardwareInterface> joint> <actuator name="${joint_name}_motor"> <hardwareInterface>hardware_interface/VelocityJointInterfacehardwareInterface> <mechanicalReduction>1mechanicalReduction> actuator> transmission> xacro:macro> <xacro:joint_trans joint_name="left_wheel2base_link" /> <xacro:joint_trans joint_name="right_wheel2base_link" /> <gazebo> <plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so"> <rosDebugLevel>DebugrosDebugLevel> <publishWheelTF>truepublishWheelTF> <robotNamespace>/robotNamespace> <publishTf>1publishTf> <publishWheelJointState>truepublishWheelJointState> <alwaysOn>truealwaysOn> <updateRate>100.0updateRate> <legacyMode>truelegacyMode> <leftJoint>left_wheel2base_linkleftJoint> <rightJoint>right_wheel2base_linkrightJoint> <wheelSeparation>${base_link_radius * 2}wheelSeparation> <wheelDiameter>${wheel_radius * 2}wheelDiameter> <broadcastTF>1broadcastTF> <wheelTorque>30wheelTorque> <wheelAcceleration>1.8wheelAcceleration> <commandTopic>cmd_velcommandTopic> <odometryFrame>odomodometryFrame> <odometryTopic>odomodometryTopic> <robotBaseFrame>base_footprintrobotBaseFrame> plugin> gazebo> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 集成xacro文件:
<robot name="my_car_camera" xmlns:xacro="http://wiki.ros.org/xacro"> <xacro:include filename="my_head.urdf.xacro" /> <xacro:include filename="my_base.urdf.xacro" /> <xacro:include filename="my_camera.urdf.xacro" /> <xacro:include filename="my_laser.urdf.xacro" /> <xacro:include filename="move.urdf.xacro" /> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 启动launch文件:
<launch> <param name="robot_description" command="$(find xacro)/xacro $(find demo02_urdf_gazebo)/urdf/xacro/my_base_camera_laser.urdf.xacro" /> <include file="$(find gazebo_ros)/launch/empty_world.launch"> <arg name="world_name" value="$(find demo02_urdf_gazebo)/worlds/hello.world" /> include> <node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" /> launch>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 控制机器人运动:命令行控制/编写节点控制:
二、传感器信息仿真及显示
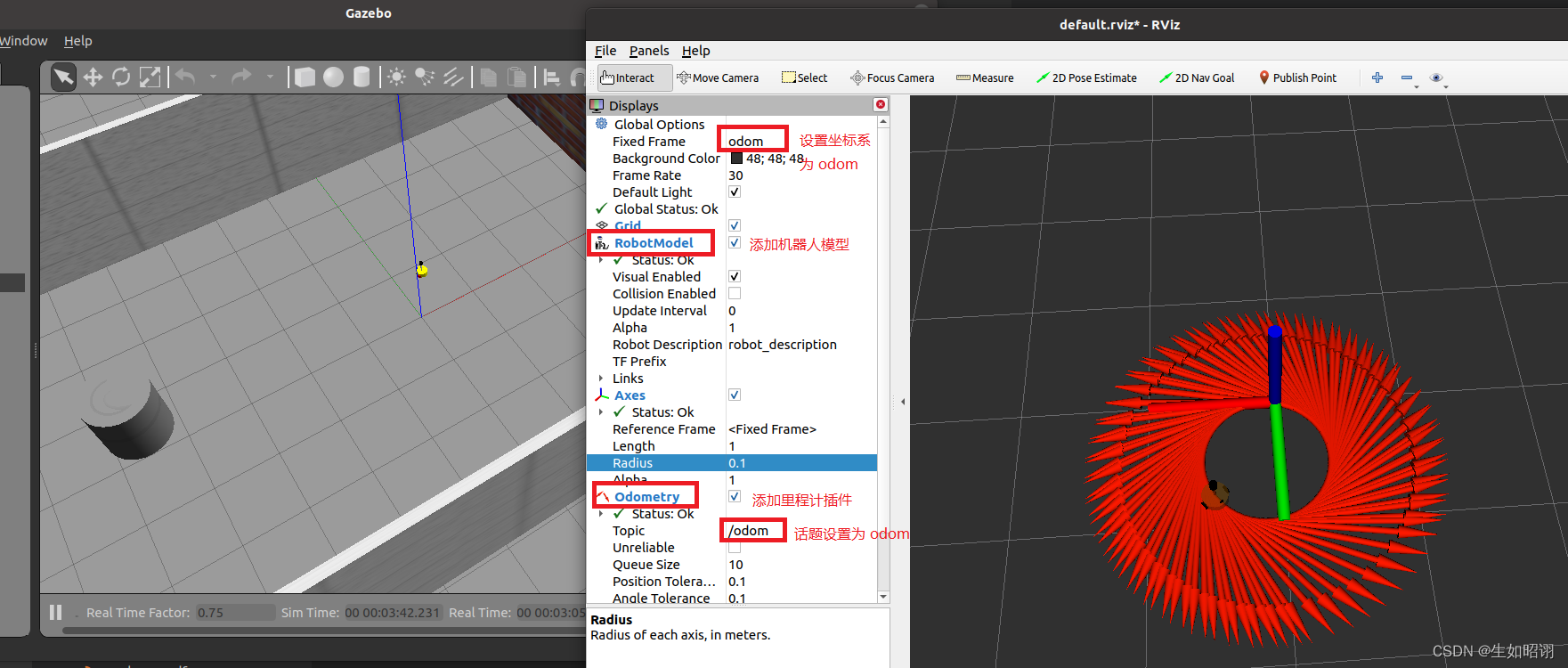
1. 里程计信息
-
里程计信息:机器人相对于出发点坐标系的位姿状态(位置坐标与运动朝向)
-
操作流程:
- 通过启动文件启动Rviz,打开状态发布节点:
<launch> <node pkg="rviz" type="rviz" name="rviz" /> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /> <node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" /> launch>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 在Rviz中添加组件:
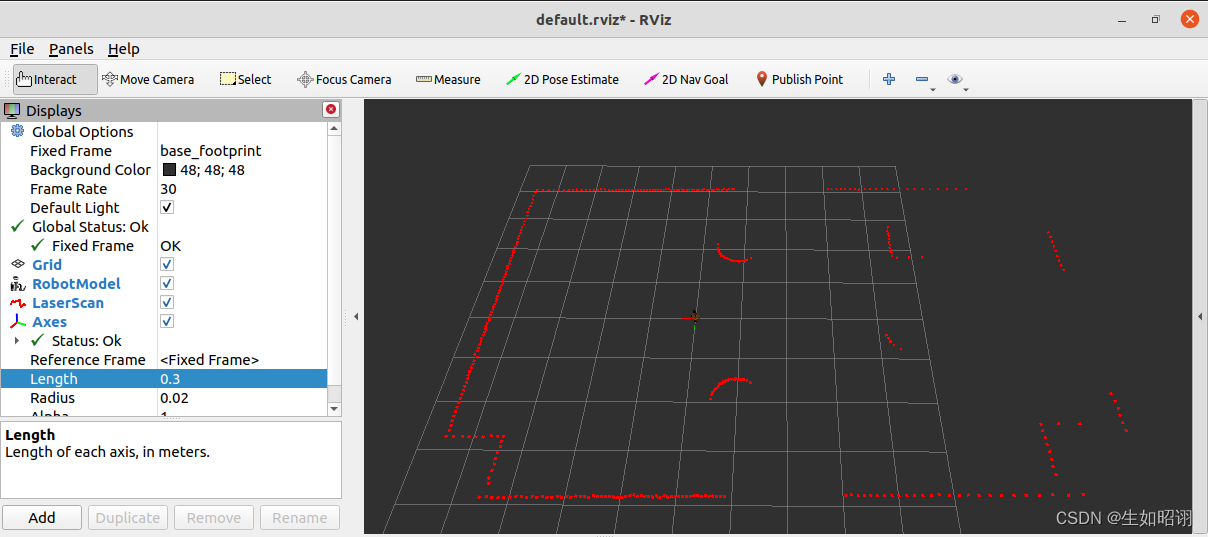
2. 雷达信息
- 2.1 编写xacro文件,添加雷达传感器信息
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro"> <gazebo reference="laser"> <sensor type="ray" name="rplidar"> <pose>0 0 0 0 0 0pose> <visualize>truevisualize> <update_rate>5.5update_rate> <ray> <scan> <horizontal> <samples>360samples> <resolution>1resolution> <min_angle>-3min_angle> <max_angle>3max_angle> horizontal> scan> <range> <min>0.10min> <max>30.0max> <resolution>0.01resolution> range> <noise> <type>gaussiantype> <mean>0.0mean> <stddev>0.01stddev> noise> ray> <plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so"> <topicName>/scantopicName> <frameName>laserframeName> plugin> sensor> gazebo> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 2.2 集成文件到机器人模型中:
<robot name="my_car_camera" xmlns:xacro="http://wiki.ros.org/xacro"> <xacro:include filename="my_head.urdf.xacro" /> <xacro:include filename="my_base.urdf.xacro" /> <xacro:include filename="my_camera.urdf.xacro" /> <xacro:include filename="my_laser.urdf.xacro" /> <xacro:include filename="move.urdf.xacro" /> <xacro:include filename="my_sensors_laser.urdf.xacro" /> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 2.3 启动gazebo,启动rviz,添加雷达信息显示插件:
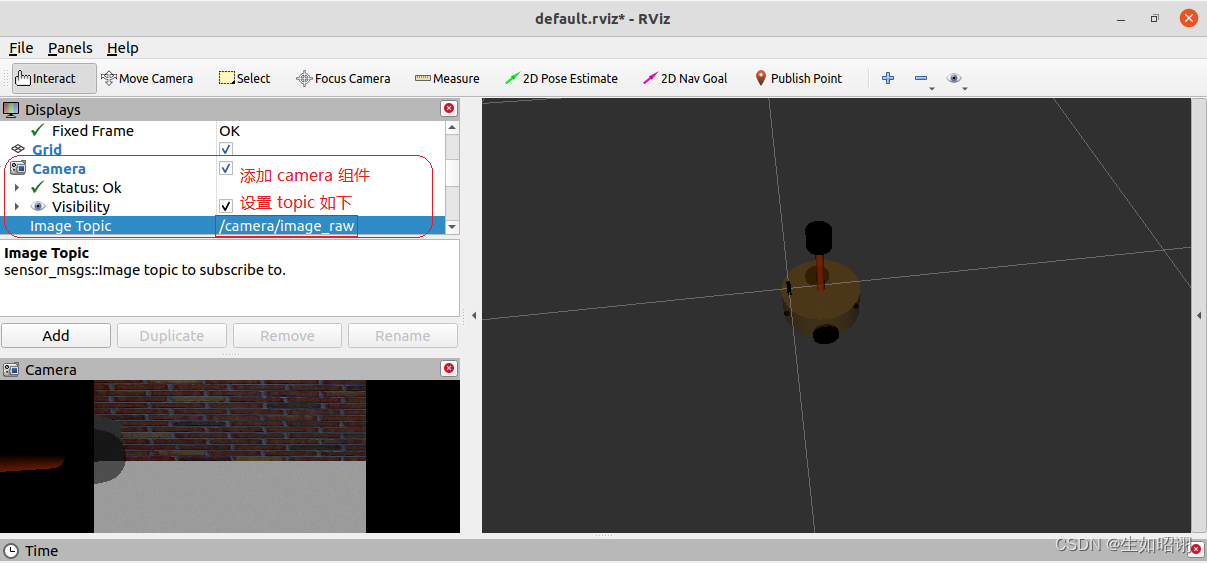
3. 摄像头信息
- 3.1 配置摄像头传感器
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro"> <gazebo reference="camera"> <sensor type="camera" name="camera_node"> <update_rate>30.0update_rate> <camera name="head"> <horizontal_fov>1.3962634horizontal_fov> <image> <width>1280width> <height>720height> <format>R8G8B8format> image> <clip> <near>0.02near> <far>300far> clip> <noise> <type>gaussiantype> <mean>0.0mean> <stddev>0.007stddev> noise> camera> <plugin name="gazebo_camera" filename="libgazebo_ros_camera.so"> <alwaysOn>truealwaysOn> <updateRate>0.0updateRate> <cameraName>/cameracameraName> <imageTopicName>image_rawimageTopicName> <cameraInfoTopicName>camera_infocameraInfoTopicName> <frameName>cameraframeName> <hackBaseline>0.07hackBaseline> <distortionK1>0.0distortionK1> <distortionK2>0.0distortionK2> <distortionK3>0.0distortionK3> <distortionT1>0.0distortionT1> <distortionT2>0.0distortionT2> plugin> sensor> gazebo> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 3.2 集成机器人模型,类似于前两个传感器,略
- 3.3 启动仿真环境gazebo,启动rviz显示数据,添加组件:
4. kinect摄像头信息
- 4.1 配置kinect传感器:
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro"> <gazebo reference="kinect link名称"> <sensor type="depth" name="camera"> <always_on>truealways_on> <update_rate>20.0update_rate> <camera> <horizontal_fov>${60.0*PI/180.0}horizontal_fov> <image> <format>R8G8B8format> <width>640width> <height>480height> image> <clip> <near>0.05near> <far>8.0far> clip> camera> <plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so"> <cameraName>cameracameraName> <alwaysOn>truealwaysOn> <updateRate>10updateRate> <imageTopicName>rgb/image_rawimageTopicName> <depthImageTopicName>depth/image_rawdepthImageTopicName> <pointCloudTopicName>depth/pointspointCloudTopicName> <cameraInfoTopicName>rgb/camera_infocameraInfoTopicName> <depthImageCameraInfoTopicName>depth/camera_infodepthImageCameraInfoTopicName> <frameName>kinect link名称frameName> <baseline>0.1baseline> <distortion_k1>0.0distortion_k1> <distortion_k2>0.0distortion_k2> <distortion_k3>0.0distortion_k3> <distortion_t1>0.0distortion_t1> <distortion_t2>0.0distortion_t2> <pointCloudCutoff>0.4pointCloudCutoff> plugin> sensor> gazebo> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 4.2 集成机器人模型,类似于之前的传感器,略
- 4.3 启动仿真环境gazebo,启动rviz显示数据,添加组件:

总结
- 声明:本节博客部分参考了CSDN用户赵虚左的ROS教程,本文主要内容是使用URDF文件建立机器人模型,并通过Gazebo创建仿真环境,模拟传感器使用,在RVIZ中完成对于传感器数据的可视化分析和处理,在后半部分的分析中我们发现,对于传感器(里程计、雷达、摄像头)分析来说,都是从xacro文件出发,添加相应配置,集成到机器人模型文件,最后启动各仿真组件修改配置完成联合仿真,各仿真组件各司其职,完成对应效果。
- 至此,ROS教程的进阶篇结束了,对于ROS部分的内容主要还有关于导航部分的内容会在后续进行补充,针对于Gazebo的使用教程也会另起专栏,敬请期待。

-
相关阅读:
特殊流&Properties属性集实例遇到的问题及解决方法
PHP + Laravel + RabbitMQ + Redis 实现消息队列 (二) 消费队列在RabbitMQ和redis中的简单使用
Linux Tips 04
将dubbo暴露HTTP服务
手撕LRU缓存——LinkedHashMap简易源码
百度强推并发编程笔记我爱了,原来这才叫并发
367. 有效的完全平方数-二分法
采用ROUANT 方法对 nex-gddp-cmip6 数据进行精度校正
Node.js 模块化及npm概念介绍
Java使用Documents4j实现Word转PDF(知识点+案例)
- 原文地址:https://blog.csdn.net/lc1852109/article/details/126048940