-
OpenCV笔记整理【霍夫变换】

上图中:笛卡尔空间中一条线(y=kx+b),k表示线段的斜率、b表示垂直线段方向的位置。映射到霍夫空间中就是一个点(k,b)。其中,xy是已知的常量,kb是变量。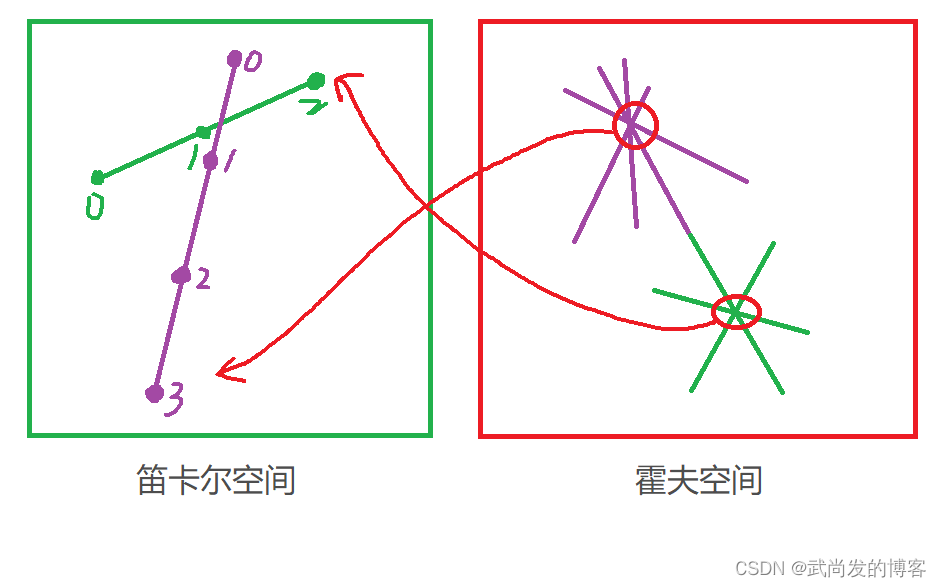
==========这里省略一万字。。。。总结:
-
在笛卡尔空间中多个点如果处在同一条直线上,那么映射到霍夫空间中,多条边会汇聚并穿过同一个交点。
-
在霍夫空间中,经过一个点的直线越多,说明在笛卡尔空间中映射的直线是由越多的点构成的。
所以霍夫变化选择直线的思路就是,选择尽可能多的直线交汇的点。
lines = cv2.HoughLinesP( img, rho, theta, threshold, minLineLength, maxLineGap )
- lines::线段数组 [[x1,y1,x2,y2]…]。
- img::原图。
- rho:半径步长,像素单位。
- theta:搜索角度(Π/180表示检测所有的角度)。
- threshold:阈值,值越小检测的直线就越多。
- minLineLength:最小长度。
- maxLineGap :线段之间的最小距离。
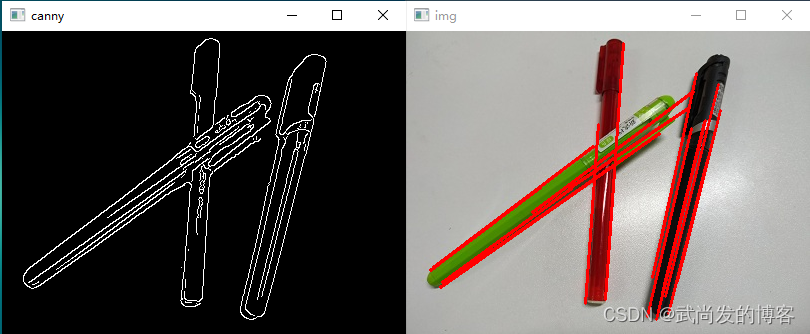
上代码:
import cv2 import numpy as np img = cv2.imread("pen.jpg") # 读取原图 o = img.copy() # 复制原图 o = cv2.medianBlur(o, 5) # 使用中值滤波进行降噪 gray = cv2.cvtColor(o, cv2.COLOR_BGR2GRAY) # 从彩色图像变成单通道灰度图像 binary = cv2.Canny(o, 50, 150) # 绘制边缘图像 # 检测直线:精度为1,全角度,阈值为15,线段最短100,最小间隔为18 lines = cv2.HoughLinesP(binary, 1, np.pi / 180, 15, minLineLength=100, maxLineGap=18) for line in lines: # 遍历所有直线 x1, y1, x2, y2 = line[0] # 读取直线两个端点的坐标 cv2.line(img, (x1, y1), (x2, y2), (0, 0, 255), 2) # 在原始图像上绘制直线 cv2.imshow("canny", binary) # 显示二值化边缘图案 cv2.imshow("img", img) # 显示绘制结果 cv2.waitKey() # 按下任何键盘按键后 cv2.destroyAllWindows() # 释放所有窗体- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
运行:
circles = cv2.HoughCircles(img, method, dp, minDist, param1, param2, minRadius, maxRadius)
- circles:圆的数组 [[x1,y1,r1]…]
- img:原图。
- method:固定使用 cv2.HOUGH_GRADIENT 作为参数。
- dp:分割比率(原图分辨率与圆心累加器的比值,1表示相等,2表示占原图的二分之一)
- minDist:圆心与圆心之间的最小距离。
- param1:Canny检测的边缘的最大阈值(越小越敏感)。
- param2:投票数,默认100(该值越小找到的圆越多)。
- minRadius:限制圆半径的最小值,默认0不做限制。
- maxRadius:限制圆半径的最大值,默认0不做限制。
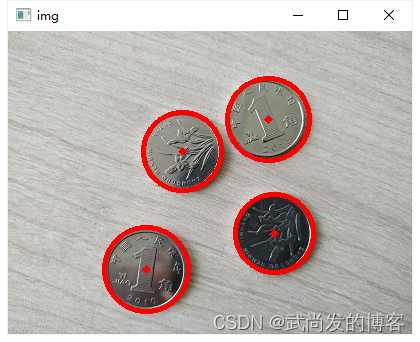
上代码:
import cv2 import numpy as np img = cv2.imread("coin.jpg") # 读取原图 o = img.copy() # 复制原图 o = cv2.medianBlur(o, 5) # 使用中值滤波进行降噪 gray = cv2.cvtColor(o, cv2.COLOR_BGR2GRAY) # 从彩色图像变成单通道灰度图像 # 检测圆环,圆心最小间距为80,Canny最大阈值为90,投票数超过25。最小半径为10,最大半径为50 circles = cv2.HoughCircles(gray, cv2.HOUGH_GRADIENT, 1, 90, param1=90, param2=25, minRadius=10, maxRadius=50) circles = np.uint(np.around(circles)) # 将数组元素四舍五入成整数 for c in circles[0]: # 遍历圆环结果 x, y, r = c # 圆心横坐标、纵坐标和圆半径 cv2.circle(img, (x, y), r, (0, 0, 255), 3) # 绘制圆环 cv2.circle(img, (x, y), 2, (0, 0, 255), 3) # 绘制圆心 cv2.imshow("img", img) # 显示绘制结果 cv2.waitKey() # 按下任何键盘按键后 cv2.destroyAllWindows() # 释放所有窗体- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
运行:
拜了个拜。。。 -
-
相关阅读:
两年“换芯”期限将至,苹果芯片工程师又被挖,微软加速开发定制芯片
【网安专题10.11】代码大模型的应用及其安全性研究
一篇文章带你入门vim
室内设计常用的涂料清单
【论文阅读】EssayGAN:基于生成对抗网络的数据增强用于自动作文评分
【论文阅读】HTTP 流量和恶意 URL 的异常检测
枚举类中有2个值,如何根据值1取值2,根据值2取值1
THREE--demo4
TiDB 集群监控 API
SAP CO系统配置-成本中心会计
- 原文地址:https://blog.csdn.net/qq_34699535/article/details/125711816
