-
【pytorch】LSTM神经网络
在处理时序数据,已经有RNN循环神经网络和GRU神经网络两个比较经典的网络。当然还有一种LSTM神经网络,长短期记忆神经网络。
从发展历史来看,是现有LSTM再有GRU的,但是从复杂度来看,LSTM比GRU更加复杂。先来回忆一下GRU,其有两个门(更新门和重置门),有一个记录历史信息的向量 H t H_t Ht。
而LSTM就更加复杂了,无论是在门的数量上还是记录历史信息的向量上。LSTM神经网络
其一共有3个门,2个状态。
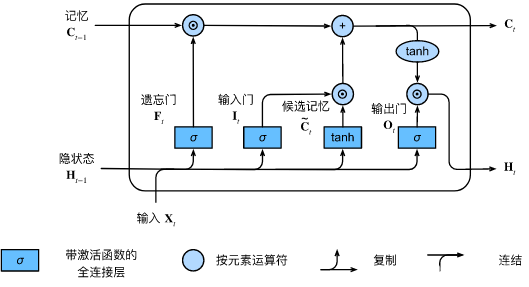
控制门
遗忘门
这个与GRU中的重置门非常类似,含义也是大致相同。
F t = Θ ( X t ⋅ W x f + H t − 1 ⋅ W h f + b f ) F_t = \Theta\left(X_t\cdot W_{xf} + H_{t - 1}\cdot W_{hf} + b_f\right) Ft=Θ(Xt⋅Wxf+Ht−1⋅Whf+bf)
而后, F t F_t Ft作用于记忆 C t − 1 C_{t-1} Ct−1,遗忘部分历史信息。输入门
它与GRU中的更新门有点类似,但是却不完全一样。
因为LSTM有两个状态,它可以理解为 C t C_t Ct的更新门。
I t = Θ ( X t ⋅ W x i + H t − 1 ⋅ W h i + b i ) I_t = \Theta\left(X_t\cdot W_{xi} + H_{t - 1}\cdot W_{hi} + b_i\right) It=Θ(Xt⋅Wxi+Ht−1⋅Whi+bi)
其后会作用于候选记忆 C t ′ C'_t Ct′,更新得出新的 C t C_t Ct。输出门
它与GRU中的更新门有点类似,但是却不完全一样。
因为LSTM有两个状态,它可以理解为 H t H_t Ht的更新门。
O t = Θ ( X t ⋅ W x o + H t − 1 ⋅ W h o + b o ) O_t = \Theta\left(X_t\cdot W_{xo} + H_{t - 1}\cdot W_{ho} + b_o\right) Ot=Θ(Xt⋅Wxo+Ht−1⋅Who+bo)
其后会作用于候选记忆 C t C_t Ct,更新得出新的 H t H_t Ht。状态
记忆状态
从整个更新过程可以看到, C t − 1 C_{t-1} Ct−1先遗忘部分信息,再与候选记忆(根据 X t X_t Xt)生成出的部分信息合并,得到 C t C_t Ct。
其的变化是较为缓慢的,也被成为长期记忆。隐状态
H t H_t Ht根据目前的输出( X t X_t Xt与 H t − 1 H_{t-1} Ht−1的结果)与当前记忆 C t C_t Ct作用的结果。相比于 C t C_t Ct, H t H_t Ht与 H t − 1 H_{t-1} Ht−1关系更弱,因此 H t H_t Ht变化更加的快。因此也被称为短期记忆。
结合上述两个状态:长期记忆与短期记忆,其就被称为长短期记忆神经网络。
代码实现
pytorch也提供了对于的LSTM层,可以十分方便的调用。
但是需要自己定义创始状态值(一个二元组)。class LSMT_Net(nn.Module): def __init__(self, vocab_size, hidden_size, **kwargs): super(LSMT_Net, self).__init__(**kwargs) self.vocab_size = vocab_size self.hidden_size = hidden_size self.LSMTlayer = nn.LSTM(vocab_size , hidden_size, num_layers= 2) self.L1 = nn.Linear(hidden_size , vocab_size) def forward(self, inputs, state): X = F.one_hot(inputs.T.long(), self.vocab_size) # 转变成一个只有一个1,其余都是0的向量 X = X.to(torch.float32) Y , state = self.LSMTlayer(X , state) Y = Y.reshape((-1 , Y.shape[-1])) Y = self.L1(Y) return Y , state def begin_state(self , batch_size): return (torch.zeros(self.LSMTlayer.num_layers , batch_size , self.hidden_size), torch.zeros(self.LSMTlayer.num_layers , batch_size , self.hidden_size))- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
-
相关阅读:
EasyExcel的使用(包含动态表头)
935.骑士拨号器 - 力扣
TS编译选项——编译TS文件同时对JS文件进行编译
Bigemap如何添加谷歌历史影像
GSAP 基础
【PID专题】MATLAB如何实现PID?
创邻科技Galaxybase—激活数据要素的核心引擎
ICASSP投稿信息整理
用友政务财务系统 FileDownload 任意文件读取漏洞复现
Java 面试题 —— TCP 粘包、拆包问题
- 原文地址:https://blog.csdn.net/lijf2001/article/details/126010725
