-
AVL树(平衡搜索树)
AVL树简介
AVL树是由GM Adelson - Velsky和EM Landis于1962年发明的。为了纪念其发明者,这树结构被命名为AVL。
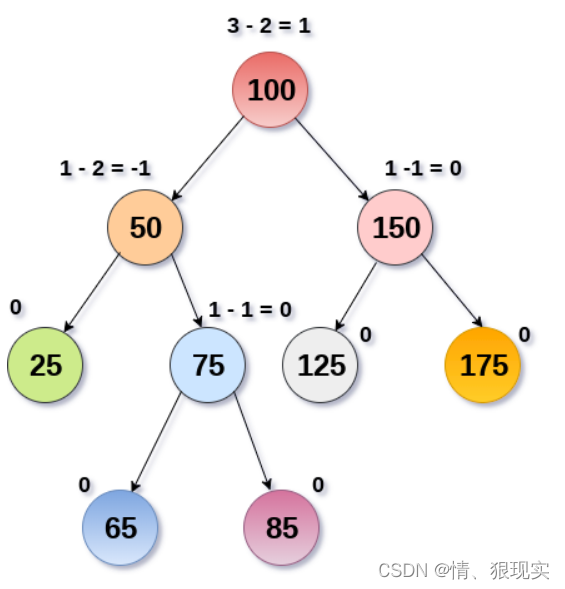
AVL树可以定义为高度平衡二叉搜索树,其中每个节点与平衡因子相关联,该平衡因子通过从其左子树的子树中减去其右子树的高度来计算。
如果每个节点的平衡因子在
-1到1之间,则称树是平衡的,否则,树将是不平衡的并且需要平衡。平衡系数(k)=高度(左(k)) - 高度(右(k))
如果任何节点的平衡因子为1,则意味着左子树比右子树高一级。如果任何节点的平衡因子为0,则意味着左子树和右子树包含相等的高度。如果任何节点的平衡因子是-1,则意味着左子树比右子树低一级。
AVL树如下图所示。 可以看到,与每个节点相关的平衡因子介于-1和+1之间。 因此,它是AVL树的一个例子。
复杂性
算法 平均情况 最坏情况 空间 O(n) O(n) 查找 O(log n) O(log n) 插入 O(log n) O(log n) 删除 O(log n) O(log n) AVL树插入元素
AVL树中的插入的执行方式与在二叉搜索树中执行的方式相同。 新节点作为叶节点添加到AVL树中。 但是,它可能会导致违反AVL树属性,因此树可能需要平衡。
可以通过应用旋转来平衡树。 仅当插入新节点时任何节点的平衡因子受到干扰时才需要旋转,否则不需要旋转。
根据插入的类型,旋转分为四类。
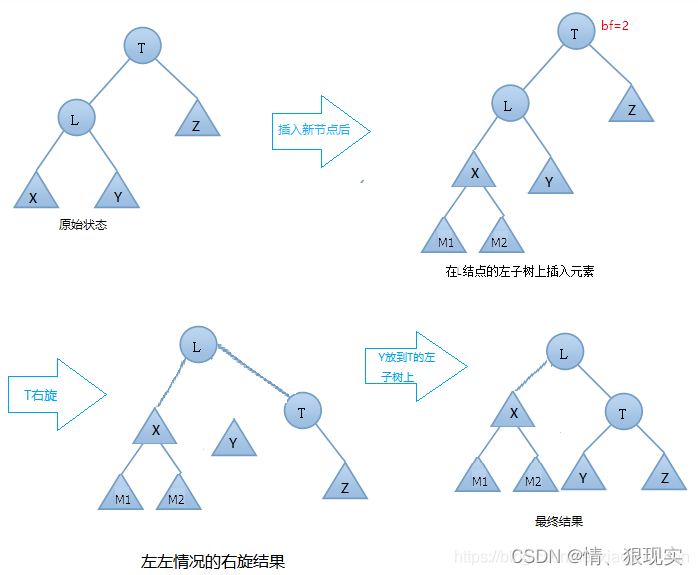
LL 右旋
新节点被插入到关键节点的左子树的左子树中
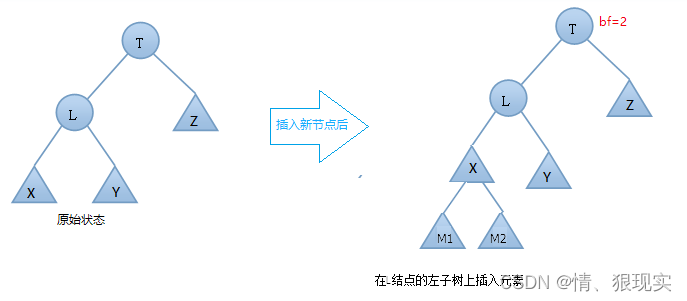
LL 右旋旋转步骤
- T向右旋转成为L的右节点
- L的右节点Y 移动到 T的左节点上
旋转中心是根节点T的左节点(L)
右旋动图
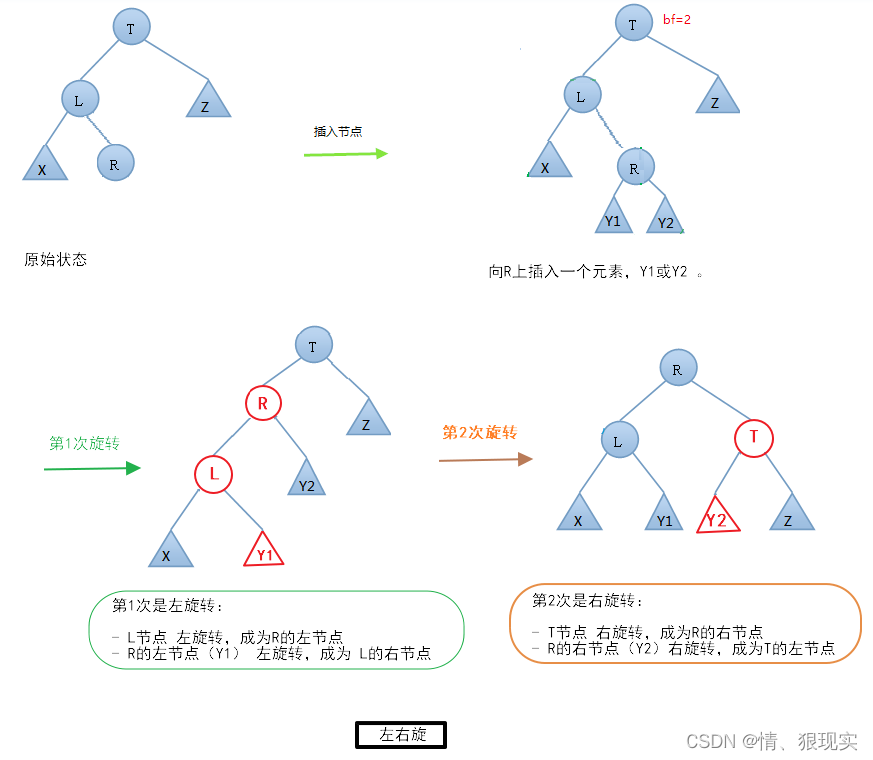
LR 左右旋
新节点被插入到关键节点的左子树的右子树中

LR 左右旋 两次旋转步骤
- 左旋转
- L节点 左旋转,成为R的左节点
- R的左节店(Y1)左旋转,成为L的右节点(左子节点左转)
- 右旋转
- T节点 右旋转,成为R的右节点
- R的右节点(Y2)右旋转,成为T的左节点(右子节点右转)
旋转中心是根节点T的左节点(R)
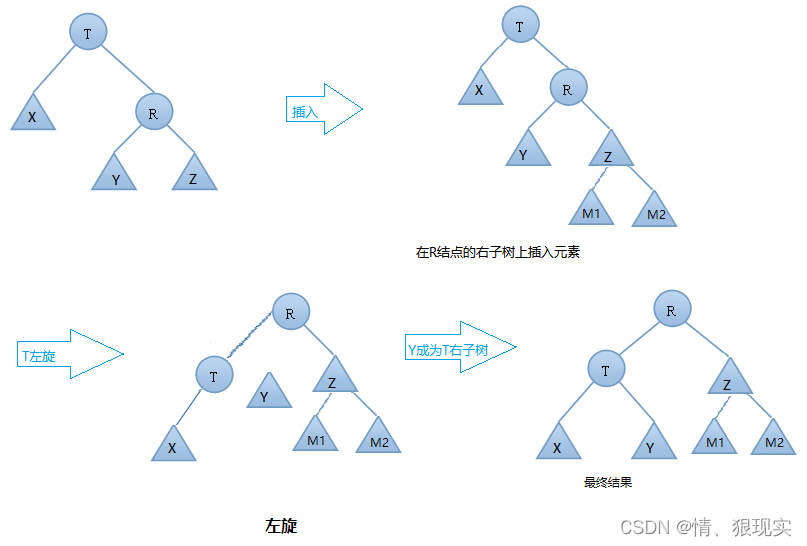
RR 左旋
新节点被插入到关键节点的右子树的右子树中
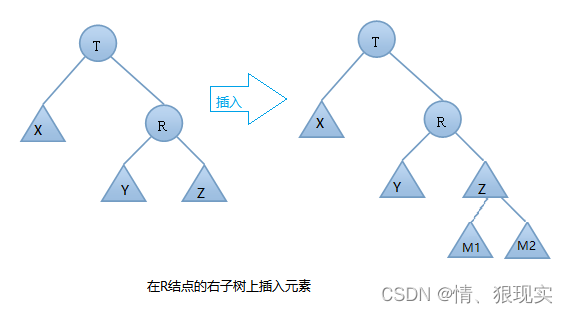
RR 左旋步骤
- T向左旋转成为R的左结点
- R的左节点Y放到T的右节点上
旋转中心是根节点T的右节点(R)。
左旋动图

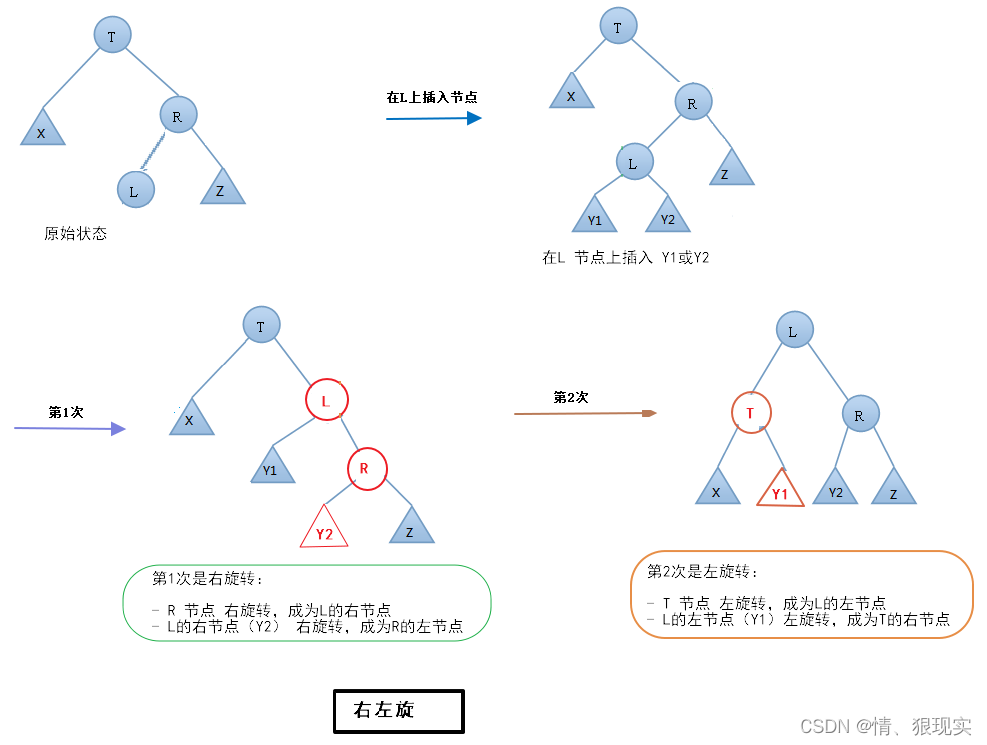
RL 右左旋
新节点被插入到关键节点的右子树的左子树中
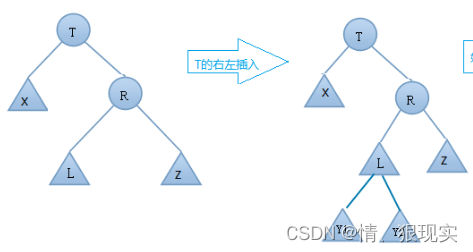
RL 右左旋 两次旋转步骤
- 右旋转
- R节点 右旋转,成为L的右节点
- L的右节店(Y2)右旋转,成为R的左节点(右子节点右转)
- 左旋转
- T节点 左旋转,成为L的左节点
- L的左节点(Y1)左旋转,成为T的右节点(左子节点左转)
旋转中心是根节点T的右节点(L)
ALV树删除元素
删除步骤
- 寻找删除目标
- 判断删除目标类型,使用转换思路,将其转换为删除叶子
- 将删除元素目标与AVL树链接断开,调整平衡,完成删除
寻找删除目标
AVL树在搜寻删除目标的过程中,需要存储这条路径上的所有节点,以供后续回溯调整时使用。
Node parent = null; Node p = t, q = null; Stack<Node> st; //p是指向AVL树的根节点的一个指针 while (p) { if (p.val == key)//当前节点就是删除目标 break; parent = p; st.push(parent);//存储轨迹 if (key > p.val)//删除目标在右树 p = p.right; else//删除目标在左树 p = p.left; } //执行到此处,p要么为预想的删除目标,要么为null(即不存在) //下一步应该是判断删除目标的类型,进行转化- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
判断删除类型,进行转化
删除目标存在两个子树或者子节点
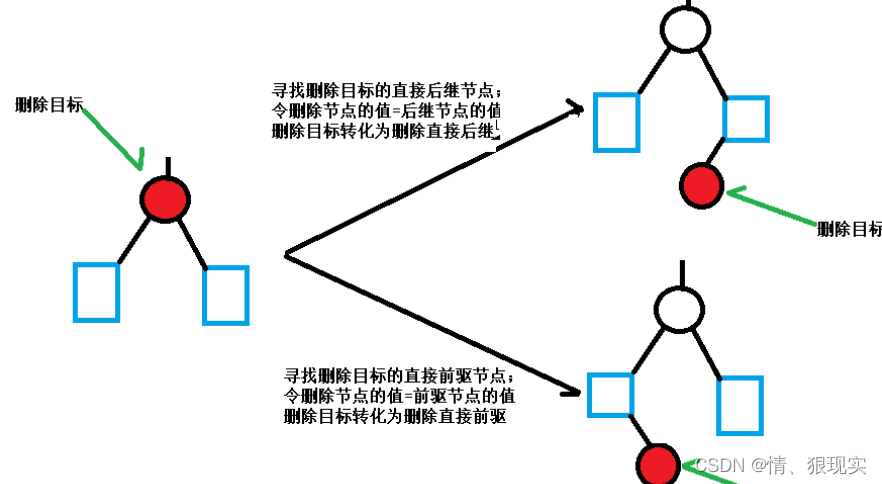
找到前驱或后驱节点,将值换成前驱或后驱节点值,最后替换掉该前驱或后驱节点利用转化思想将非叶子节点转化为删除叶子节点,难度大大降低。
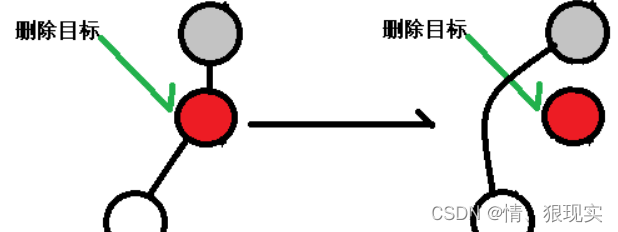
删除目标最多只有一个子节点
只有一个子节点,非常容易处理,我们只需要令删除目标的父节点链接删除目标的子节点,再删除目标即可。如下图所示:
当然在这里面存在一种较特殊的情况,即整棵树只有两个节点,且删除目标是根节点。这种情况下我们直接令子节点成为根节点即可。如下: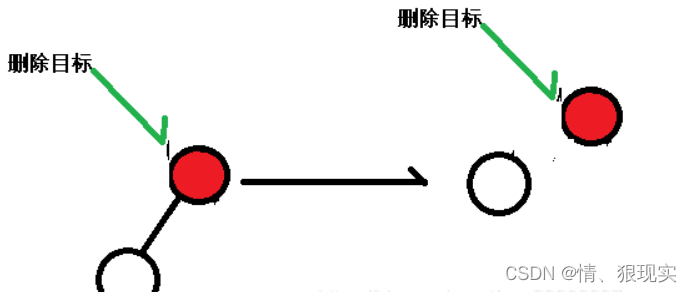
if (p==null)//删除目标不存在 return false; //删除节点 if (p.left && p.right) {//删除目标左右皆有 parent = p; q = p.left; st.push(parent); while (q.right) { parent = q; st.push(parent); q = q.right; } p.val = q.val; p = q;//转化为删前驱 } //p是删除目标,q是删除目标的子女节点 if (p.left) q = p.left; else q = p.right; if (parent==null)//删除目标是整棵AVL的根节点 t = q; else { //断开p节点,链接它的子女q if (parent.left == p) //删除目标是左孩子 parent.left = q; else//删除目标是右孩子 parent.right = q; } //下一步应该是调整平衡- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
调整平衡
上文可以得出本文在代码中是定义
p为删除目标,因此下文沿用。首先,我们应明白的是:
- 若
p是其父节点parent的左子女,删除p,引起左树高度降低,因此parent的平衡因子需要+1; - 若
p是其父节点parent的右子女,删除p,引起右树高度降低,因此parent的平衡因子需要-1; - 因为
parent的父节点也会受parent的影响,因此有可能也需要调整,所以有可能这个调整需要不断往上追溯。
parebt的平衡因子原来为0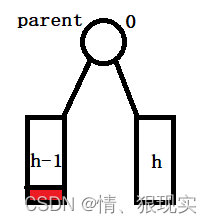
这种情况下,无论删除parent的左子树还是右子树上的节点,但是不会影响到以parent为父节点的子树高度,因此这种情况下只需要改变parent的平衡因子即可:0------>1/-1parent的平衡因子原来绝对值为1,且被删节点位于较高的子树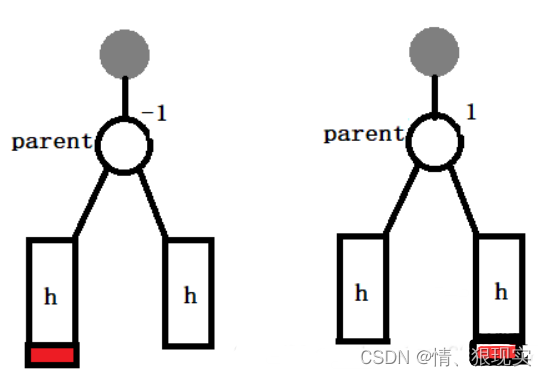
可以发现,该种情况下,删除支树上的节点将使得parent的平衡因子变为0。但由于删除使得该支树高度减1,因此需要向上平衡,沿着栈中存储的路径回溯。因此,父节点平衡因子改动后并不意味着完成了平衡,而要追溯修改更上层的祖先节点。
parent的平衡因子原来绝对值为1,且被删节点位于较矮的子树在这种情况下,删除较矮子树上的节点,
parent的平衡因子会变为2/-2,parent失衡,光是调整平衡因子已经不能解决问题,而是需要旋转操作进行再平衡。情况1:
parent的平衡因子为2,q的平衡因子为0,执行一次左单旋即可结束平衡工作;反之,parent的平衡因子为-2,q的平衡因子为0,执行一次右单旋即可结束平衡工作;
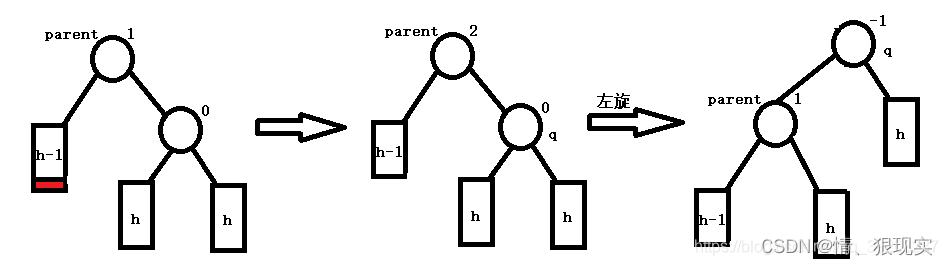
情况2:
parent的平衡因子与q的平衡因子同符号,则可以使用一个单旋转进行再平衡。如下图所示,二者皆为正,进行一次左旋即可平衡目前的支树结构。但由于旋转导致parent的父节点高度减1,所以需要继续向上考察路径中的平衡状态。
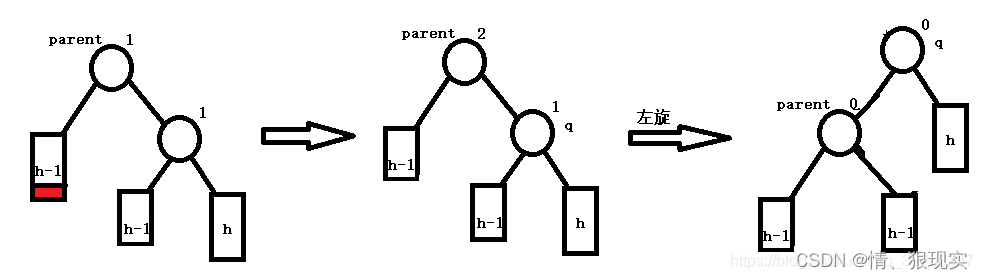
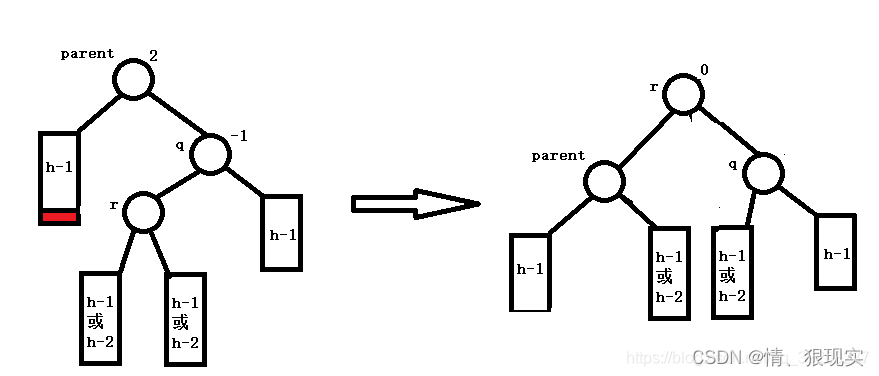
情况3:
parent的平衡因子与q的平衡因子异符号,则需要使用双旋转进行再平衡。但由于旋转导致parent的父节点高度减1,所以需要继续向上考察路径中的平衡状态。
参考文章
-
相关阅读:
ERROR: No matching distribution found for PIL
24_ue4进阶末日生存游戏开发[按路径巡逻]
【Linux】2022 安装jdk教程,超级详细
misc类设备驱动0——板载蜂鸣器驱动测试
隐私协议及人脸协议
LeetCode17电话号码的字母组合
基于单片机的出租车计价器设计
程序员如何具备跨行业视角
分享教学项目:开源一个对象映射框架
sentry安装过程故障排查
- 原文地址:https://blog.csdn.net/Ctrl_kun/article/details/126012637
