-
【学习笔记】高光谱基础知识
1. 基本概念
1.1 电磁波理论
人类通过实践发现地球上每一个物体都在不停地吸收,发射信息和能量,其中有一种人类已经认识到的形式——电磁波,并且发现不同物体的电磁波特性是不同的,遥感就是根据这个原理来探测、识别远距离物体的。
正像人们一直生活在看不见的空气一样,人们也看不见无处不在的电磁波。变化的电场和磁场构成了电磁场,而电磁场在空间的传播就形成了电磁波。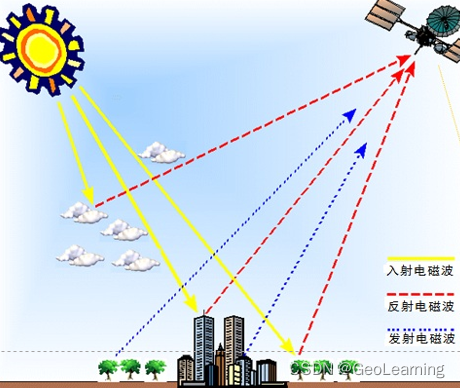
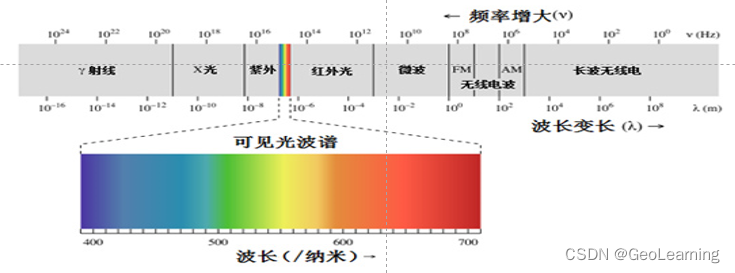
按照电磁波在真空中传播的波长或频率,递增或者递减排列,构成电磁波谱。主要的遥感电磁波谱段如下:
- 紫外线:波长范围为0.01~0.38μm,太阳辐射通过大气层时被吸收,只有波长0.3~0.38μm的紫外线能够穿过大气层到达地面。
- 可见光:波长范围0.38~0.76μm,是遥感成像使用的主要波段之一。
- 红外线:波长范围为0.76~1000μm,根据性质分为近红外、中红外、热红外和超远红外。
- 微波:波长范围为1 mm~1 m,穿透性好,不受云雾的影响,全天候、全天时。
1.2 遥感
广义的遥感:即“遥远的感知”,Remote Sensing。广义理解,泛指一切无接触的远距离探测,包括对电磁场、力场、机械波(声波、地震波)等的探测。
狭义的遥感:是应用探测仪器,不与探测目标相接触,从远处把目标的电磁波特性记录下来,通过分析,揭示出物体的特征性质及其变化的综合性探测技术。
1.3 高光谱遥感
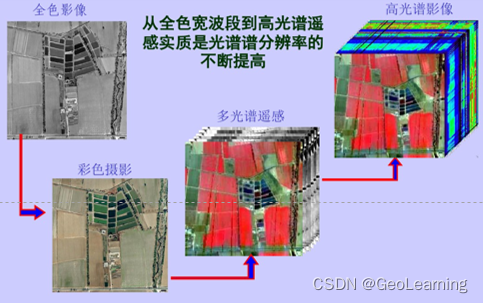
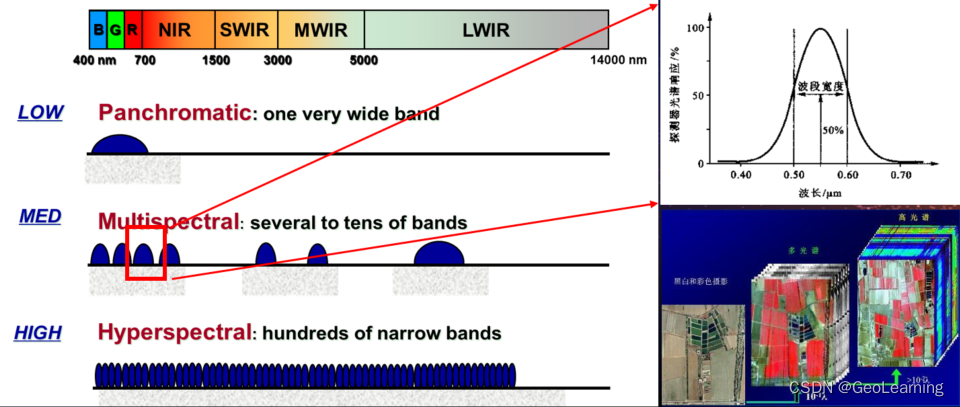
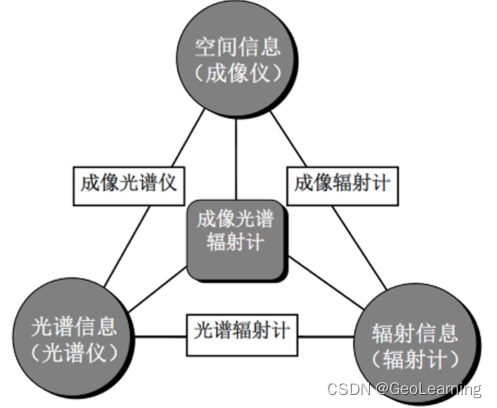
高光谱遥感(Hyperspectral Remote Sensing)用很窄(10-2λ)而连续的光谱通道对地物持续遥感成像的技术。在可见光到短波红外波段其光谱分辨率高达纳米(nm)数量级,通常具有波段多的特点,光谱通道数多达数十甚至数百个以上,而且各光谱通道间往往是连续的,因此高光谱遥感又通常被称为成像光谱 (Imaging Spectrometry)遥感。
注意:区别于传统的多光谱扫描仪
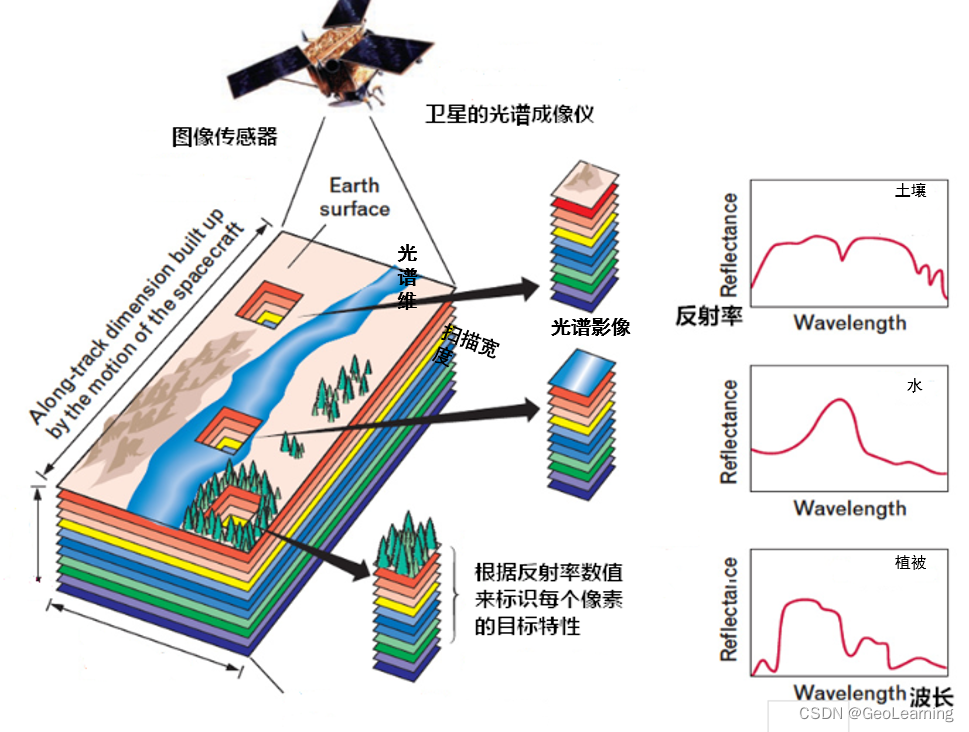
成像光谱仪获取的数据包括二维空间信息和一维光谱信息,所有的信息可以视为一个三维数据立方体。一些概念:
- 光谱响应函数
- 光谱分辨率
- 空间分辨率
- 仪器视场角
- 信噪比
- 探测器凝视时间
1.3.1 光谱响应函数
光谱响应函数(Spectral Response Function, SRF)指的是传感器在每个波长处,接收的辐亮度与入射的辐亮度的比值。由于传感器硬件的限制,传感器在某个预定波长范围内的响应不可能是100%。
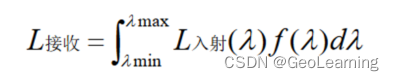
其中: L接收:为传感器记录到的辐射能量值;
L入射(λ):为传感器入瞳处波长为λ的辐射能量;
f(λ):为传感器在波长λ处的光谱响应率。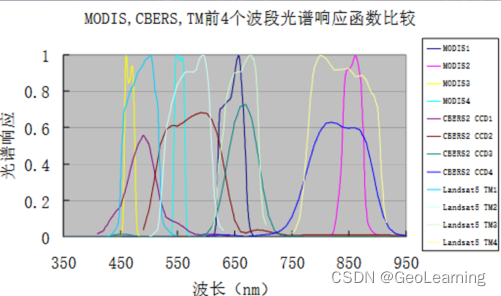
1.3.2 光谱分辨率
指传感器接收目标辐射的波谱时能分辨的最小波长间隔,间隔越小,分辨率越高。光谱分辨率被严格定义为仪器在达到50%光谱响应时在波长方向的宽度(波段宽度,Bandwidth)。
1.3.3 空间分辨率
空间分辨率是由仪器的角分辨力(Angular Resolving Power)即仪器的瞬时视场角 (Instantaneous Field of View, IFOV)决定。遥感器的瞬时视场角是指某一瞬间遥感系统的探测单元对应的瞬时市场。IFOV以毫弧度(mrad)为计量单位,其所对应的地面大小被称为地面分辨单元(Ground Resolution Cell)。
根据瞬时视场角和遥感器距地面高度计算图像空间分辨率:
GR=2×H×tan(IFOV/2)
其中,H为遥感平台高度。1.3.4 仪器视场角
指仪器扫描镜在空中扫过的角度,它和遥感平台高度H共同决定了地面扫描幅宽(ground swath,GS)
GS=2×H×tan(FOV/2)
其中,H为遥感平台高度。1.3.5 信噪比
信噪比是遥感器采集到的信号和噪声的比。信噪比的高低直接影响了图像的分类和图像目标的识别等处理效果。
信噪比和图像的空间分辨率、光谱分辨率是相互制约的,空间分辨率和光谱分辨率的提高都会降低信噪比,实际应用中,这三个指标的选择都是在一定的目标要求下综合考虑各方面因素之后进行取舍的。1.3.6 探测器凝视时间
探测器的瞬时视场角扫过地面分辨单元的时间称为凝视时间,其大小为行扫描时间与每行像元数的比值。凝视时间越长,进入探测器的能量越多,光谱响应越强,图像的信噪比也就越高。推扫型成像光谱仪比摆扫型成像光谱仪的探测器凝视时间有很大提高。
2. 高光谱遥感数据特点
2.1 光谱分辨率高
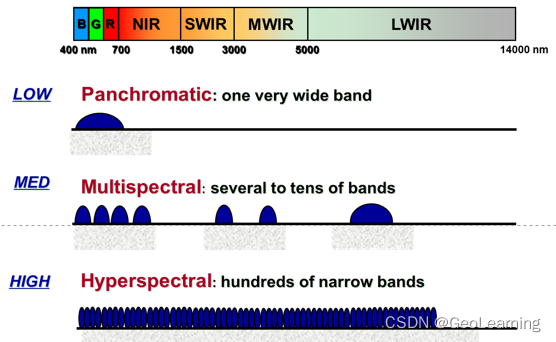
光谱分辨率高,能反映地物光谱的细微特征。与地面光谱辐射计相比,成像光谱仪不是在“点”上的光谱测量,而是在连续空间上进行光谱测量,因此它是光谱成像的; 与传统多光谱遥感相比,其光谱通道不是离散而是连续的, 因此从它的每个像元均能提取一 条平滑而完整的光谱曲线。
高光谱遥感器——成像光谱仪,能获得整个可见光,近红外,短波红外,热红外波段的多而窄的连续光谱,波段数多至几十甚至数百个,光谱分辨率可以达到纳米级,一般为10-20nm,个别达2.5nm。2.2 图谱合一
高光谱遥感获取的地表图像包含了地物丰富的空间、辐射和光谱三重信息,既表现了地物空间分布的影像特征,又以其中某一像元或像元组为目标获得它们的辐射强度以及光谱特征。
影像、辐射与光谱这三个遥感中最重要的特征的结合就成为高光谱成像,特别是成像光谱进而作为成像光谱辐射遥感信息最重要的特点。
2.3 光谱通道多
传统的全色和多光谱遥感器在光谱波段数上是非常有限的,在可见光和反射红外区,其光谱分辨率通常在100nm量级。
而成像光谱仪的光谱波段多,一般是几十个或者几百个,甚至高达上千个,而且这些光谱波段一般在成像范围内都是连续成像,因此,成像光谱仪能够获得地物在一定范围内连续的、精细的光谱曲线。2.4 数据量大,信息冗余
- 数据量大:随着波段数的增加,数据量成指数增加;
- 信息冗余增加:由于相邻波段高度相关,冗余信息也相对增加
3. 典型地物光谱特征
3.1 植被
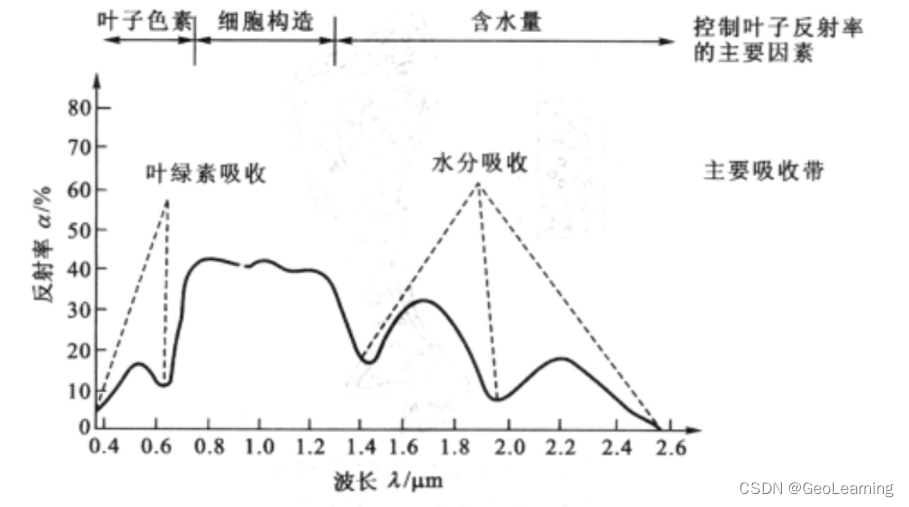
影响植物光谱的因素有植物本身的结构特征,也有外界的影响。从健康植被的光谱曲线可以看出,控制植物反射率的主要因素有:
- 植物叶子的颜色
- 叶子的细胞构造
- 植物的水分…
如下如是健康植被的反射光谱曲线:
3.2 土壤
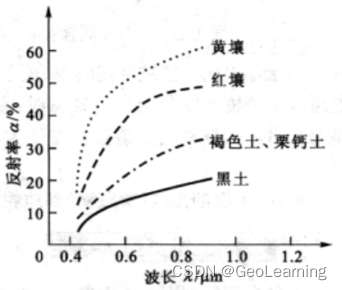
在地面植被稀少的情况下,土壤的反射曲线与其土壤成分和颜色密切相关:颜色浅的土壤具有较高的反射率,颜色较深的土壤反射土壤反率较低。
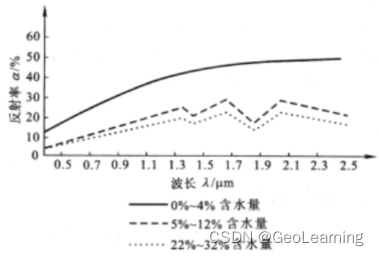
土壤水的含量增加,会使反射率曲线平移下降,并且有两个明显的水分吸收谷。
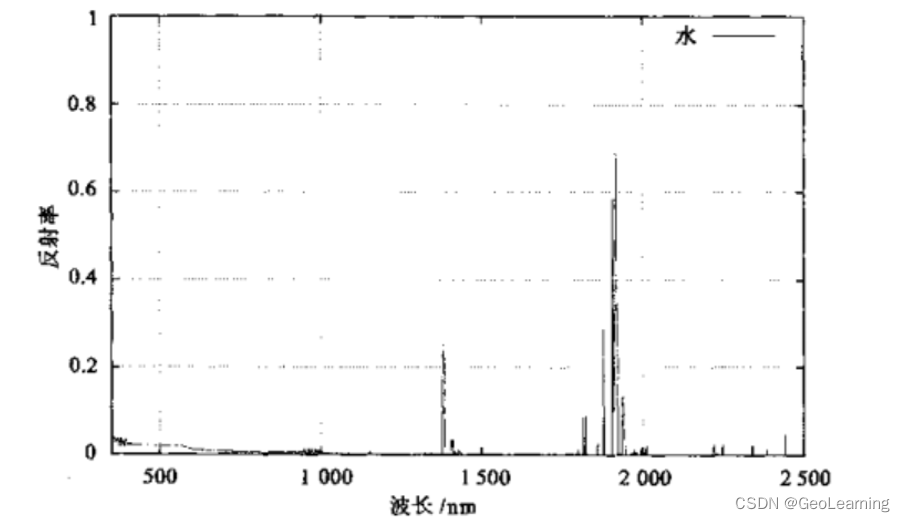
3.3 水体
在可见光范围内,水体的反射率总体上比较低,不超过10%,一般为4%~5%,并随着波长的增大逐渐降低,到0.6 um处约2%~3%。
过了0.75μm,水体几乎成为全吸收体。在近红外的遥感影像上,清澈的水体呈黑色。
水体在微波1mm~30cm范围内的发射率较低,约为0.4%。平坦的水面,后向散射很弱,因此侧视雷达影像上,水体呈黑色。故用雷达影像来确定洪水淹没的范围也是有效的手段。
含有泥沙的浑浊水体与清水比较,光谱反射特征存在以下差异:
- 浑浊水体的反射波谱曲线整体高于清水,随着悬浮泥沙浓度的增加,差别加大;
- 波谱反射峰值向长波方向移动(“红移”)。清水在0.751m处反射率接近于零,而含有泥沙的浑浊水至0.93um处反射率才接近于零。

4. 高光谱卫星数据简单列举
- 珠海一号
- 高分五号
- 资源一号02D卫星(ZY-1E)
- EO-1 Hyperion
- …
5. 高光谱卫星数据常用软件
- PIE-hyp
- ENVI
…
结束语
欢迎批评指正,仅供学习交流,如有侵权请联系删除。
参考资料
[1]《遥感导论》-梅安新
[2]《遥感应用分析原理与方法》-赵英时
[3]《高光谱遥感——原理、技术与应用》-童庆禧 -
相关阅读:
哪一款运动蓝牙耳机比较好、2022最值得入手的运动耳机
SpringBoot集成neo4j实战
如何打造一个网络框架模块对接服务器
linux环境下文件传输与环境命令
嵌入式学习笔记(32)S5PV210的向量中断控制器
Django笔记二十之手动编写migration文件
Flink 的 Kafka Table API Connector
一分钟了解期权合约转仓交易的流程
想知道哪些软件可以做到免费去视频水印吗?这篇文章告诉你答案
圆满落幕!回顾 eBPF 技术的发展与挑战
- 原文地址:https://blog.csdn.net/qq_32390983/article/details/125643827