-
【五分钟Paper】基于参数化动作空间的强化学习
- 论文题目:Reinforcement Learning with Parameterized Actions
所解决的问题?
背景
参数化动作空间说的就是一个离散动作带有一个向量化的参数。在每个决策步,一个智能体需要决策哪个动作去执行,并且这个动作带哪个参数去执行。
所采用的方法?
提出
Q-PAMDP算法,交替学习离散动作和连续动作。那么对于在状态 s s s下选择某个参数化动作的概率就可以表示为 π ( a , x ∣ s ) \pi(a,x|s) π(a,x∣s)。对于离散动作的选择可以表示为 π d ( a ∣ s ) \pi^{d}(a|s) πd(a∣s),对于动作参数的选择可以表示为 π a ( x ∣ s ) \pi^{a}(x|s) πa(x∣s),整个策略的概率可以表示为:π ( a , x ∣ s ) = π d ( a ∣ s ) π a ( x ∣ s ) \pi(a,x|s) = \pi^{d}(a|s)\pi^{a}(x|s) π(a,x∣s)=πd(a∣s)πa(x∣s)
选择离散动作的策略参数用 w w w表示,则为 π w d ( a ∣ s ) \pi_{w}^{d}(a|s) πwd(a∣s),参数化动作策略用一个参数集合表示 θ \theta θ,定义为 π θ a ( x ∣ s ) \pi_{\theta}^{a}(x|s) πθa(x∣s),这个参数化集合可以表示为 θ = [ θ a 1 , ⋯ , θ a k ] \theta = [\theta_{a_{1}}, \cdots, \theta_{a_{k}}] θ=[θa1,⋯,θak]。
想要优化参数,第一种方式就是直接优化 θ \theta θ和 w w w两个参数:
J ( θ , ω ) = E s 0 ∼ D [ V π Θ ( s 0 ) ] J(\theta, \omega)=\mathbb{E}_{s_{0} \sim D}\left[V^{\pi_{\Theta}}\left(s_{0}\right)\right] J(θ,ω)=Es0∼D[VπΘ(s0)]
第二种方式是交替更新二者,固定 θ \theta θ的时候可以优化出 w w w参数:
W ( θ ) = arg max ω J ( θ , ω ) = ω θ ∗ W(\theta)=\arg \max _{\omega} J(\theta, \omega)=\omega_{\theta}^{*} W(θ)=argωmaxJ(θ,ω)=ωθ∗
之后固定 w w w优化 θ \theta θ参数:
J ω ( θ ) = J ( θ , ω ) H ( θ ) = J ( θ , W ( θ ) ) Jω(θ)=J(θ,ω)H(θ)=J(θ,W(θ))
Jω(θ)H(θ)=J(θ,ω)=J(θ,W(θ))Jω(θ)H(θ)=J(θ,ω)=J(θ,W(θ)) 其算法伪代码为:
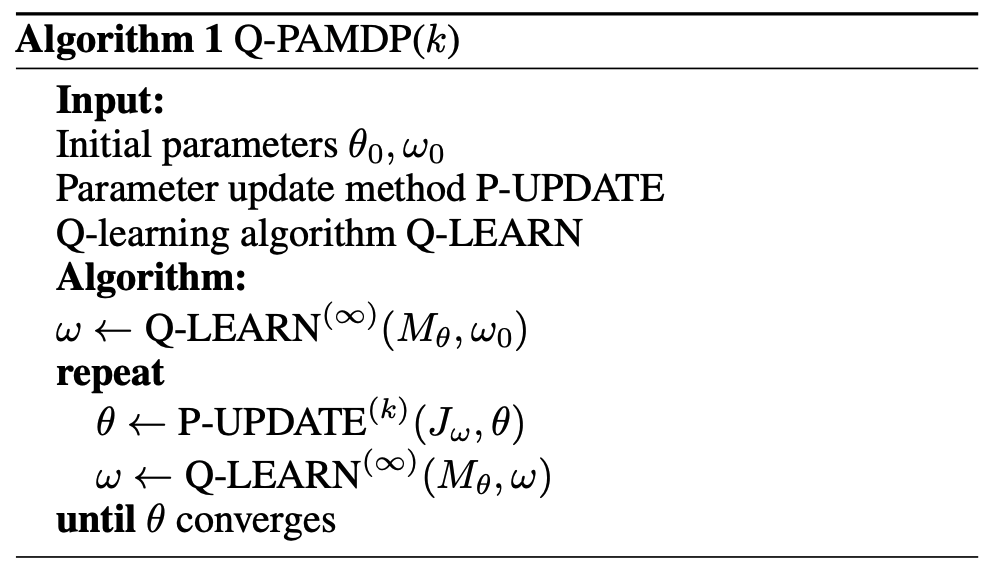
作者还提供了一个理论分析证明,之后要是会用到再补吧。
取得的效果?
所出版信息?作者信息?
参考链接
相关论文
-
相关阅读:
MySQL之如何复制一张表的数据
MQ通道常用知识列举(一)
拿下Spring全家桶后,我跳槽了
CentOS 7.9如何禁止内核自动更新升级
总结:css中水平居中
PCB layout有DRC为什么还要用CAM和DFM检查?
go中读写锁(rwmutex)源码解读实现原理
安装并创建自己的第一个vue项目
艾美捷ProSci丨ProSci TM4SF1 抗体解决方案
猿创征文| Dcoker实战:Linux环境安装Redis图文教程
- 原文地址:https://blog.csdn.net/weixin_39059031/article/details/125953763