-
【唐宇迪 深度学习-3D点云实战系列】学习笔记
课程目录如下:
https://download.csdn.net/learn/35500/529919

一、3D点云应用领域分析
- 3D点云领域都关注了哪些方向?
- 课程核心系列-PointNet系列:点云数据如何处理、点云数据如何进行特征提取。后续无论是分类、分割、补全、配准检测,首先都要先对点云数据进行特征提取。
- PointNet系列就是重点系列。算法原理、论文思想、源码实现
- 基础算法、论文核心思想。
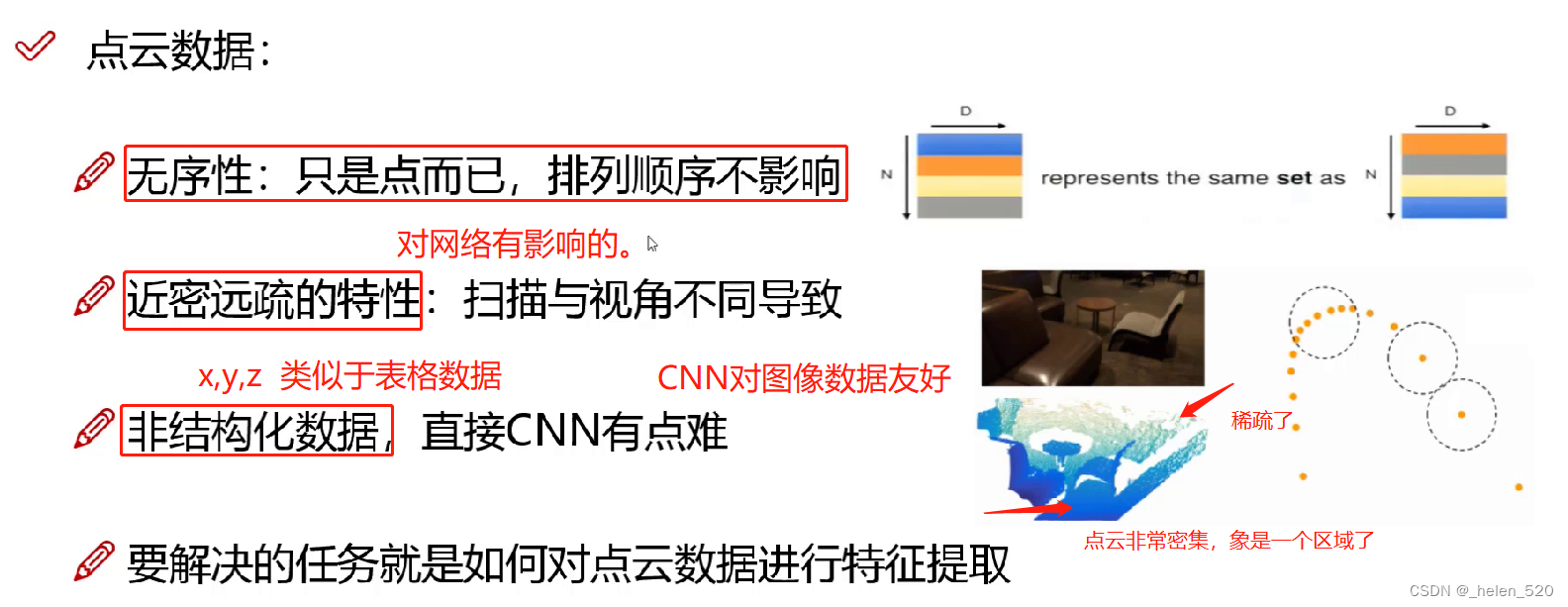
点云数据的特点:
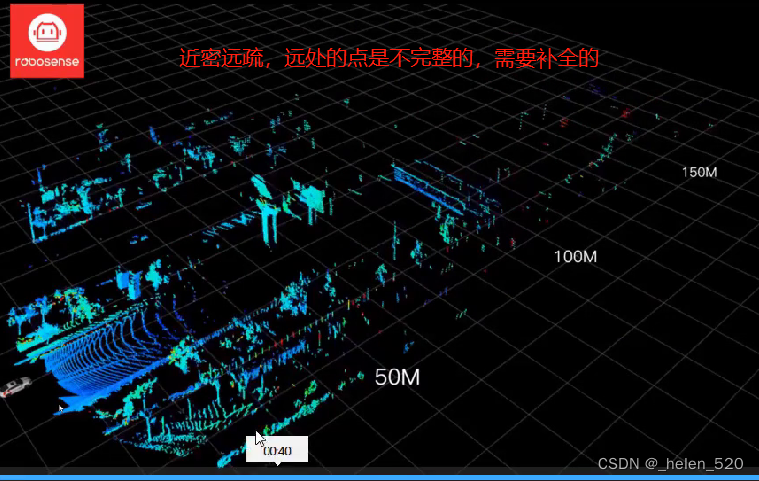
① 由点组成,近密远疏
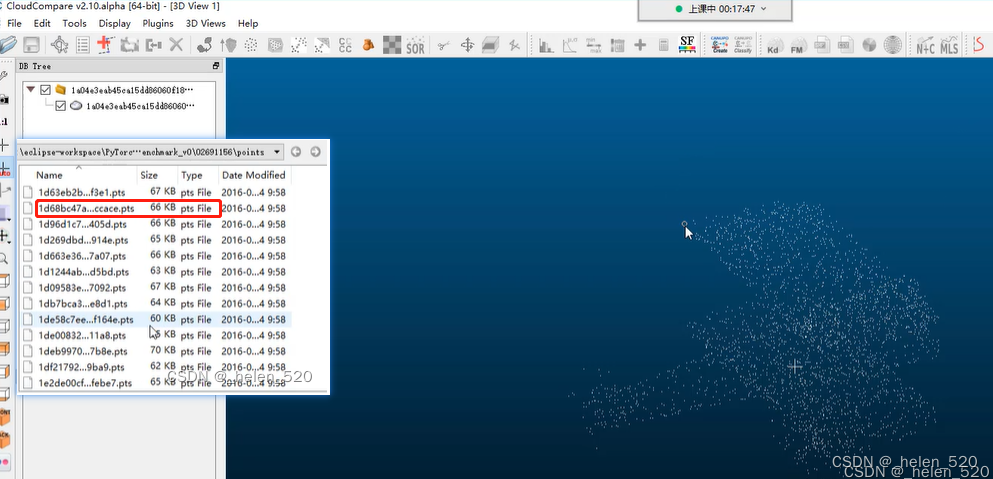
② 有遮挡实际的点云数据:软件CloudCompare 3D坐标(x,y,z); 数据格式为.pts
点云的应用:无人机进行环境3D重建。 在城市的交通等领域还是有需求的。点云是有3维的数据的,比2D的数据多了一个维度的。
可以旋转、多视角的观察数据。
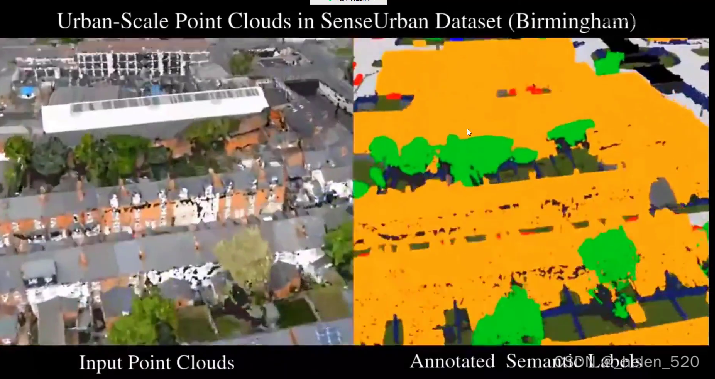
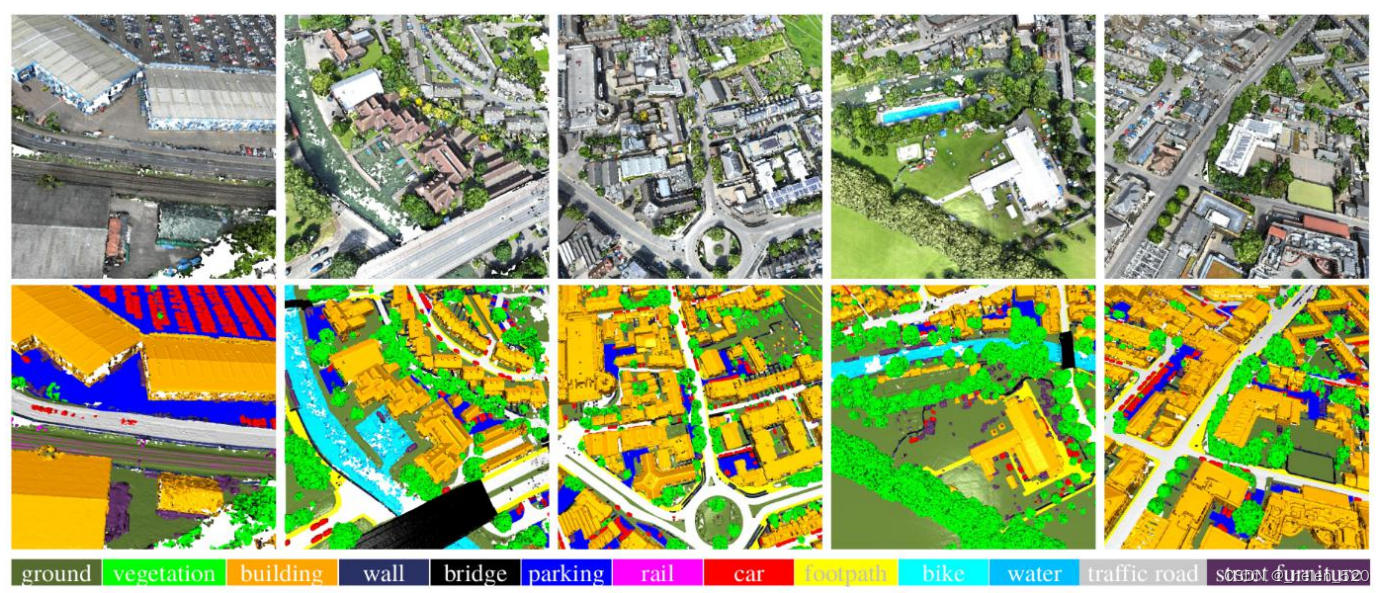
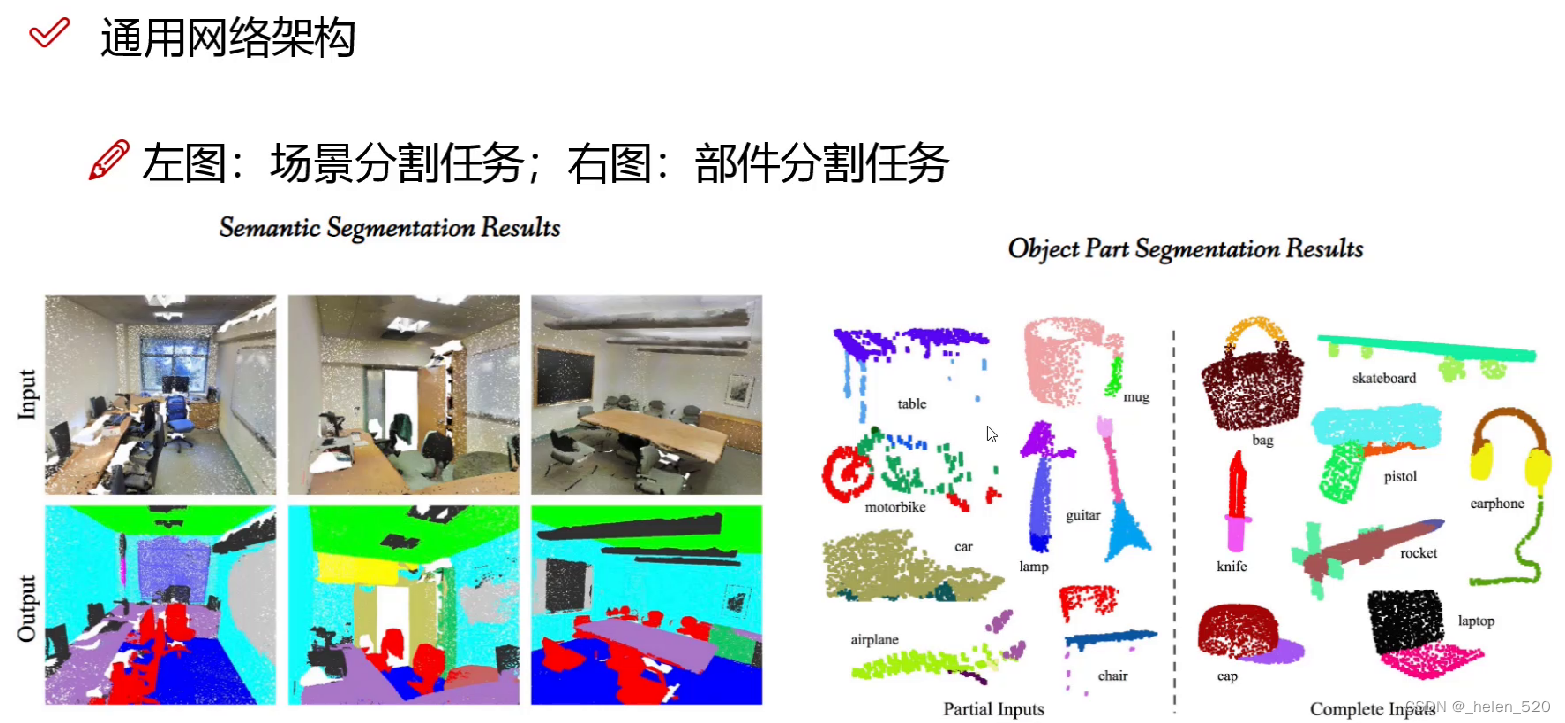
公开的数据集如下: 左侧为点云;右侧为分割结果。
2020年开始,点云算是一个比较火热的领域了。计算机视觉的算法、论文研究——然后才有实际输出。
在2020在点云方向的paper越来越多了。视觉领域的图像、视频算法研究已经饱和,目前转向了点云了。不断的在挖掘这个领域了。
点云的应用:
① 点云分割:点云中没有像素值的大小,只有坐标。那怎么做分割呢?
不是做实例分割。部件分割。判断每一个点属于哪一个任务? 传统的图像是每一个像素属于哪一块。
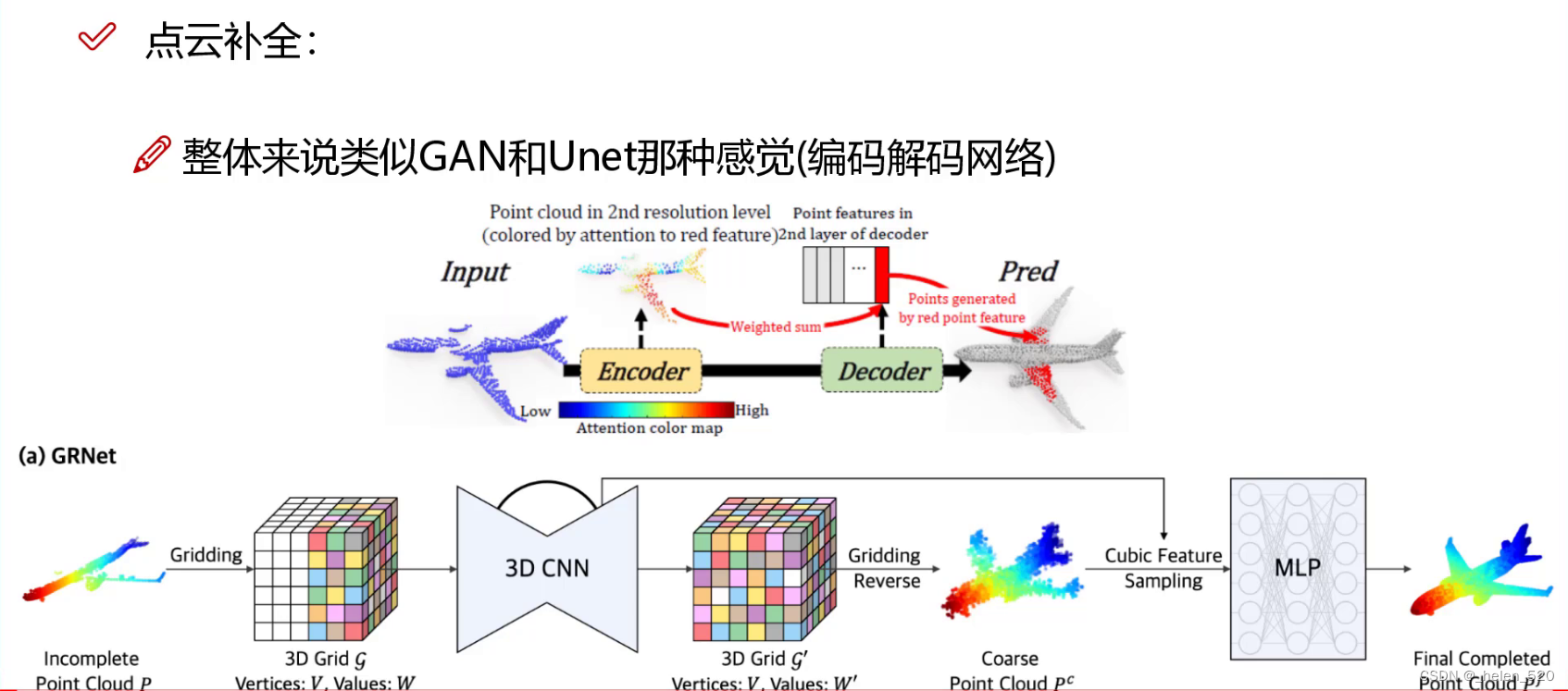
② 点云补全:近密远疏
把缺失的点补全出来。 编码器encoder,解码器decoder。对抗生成网络。风格迁移、AI变脸、特效等,有点类似的技术。
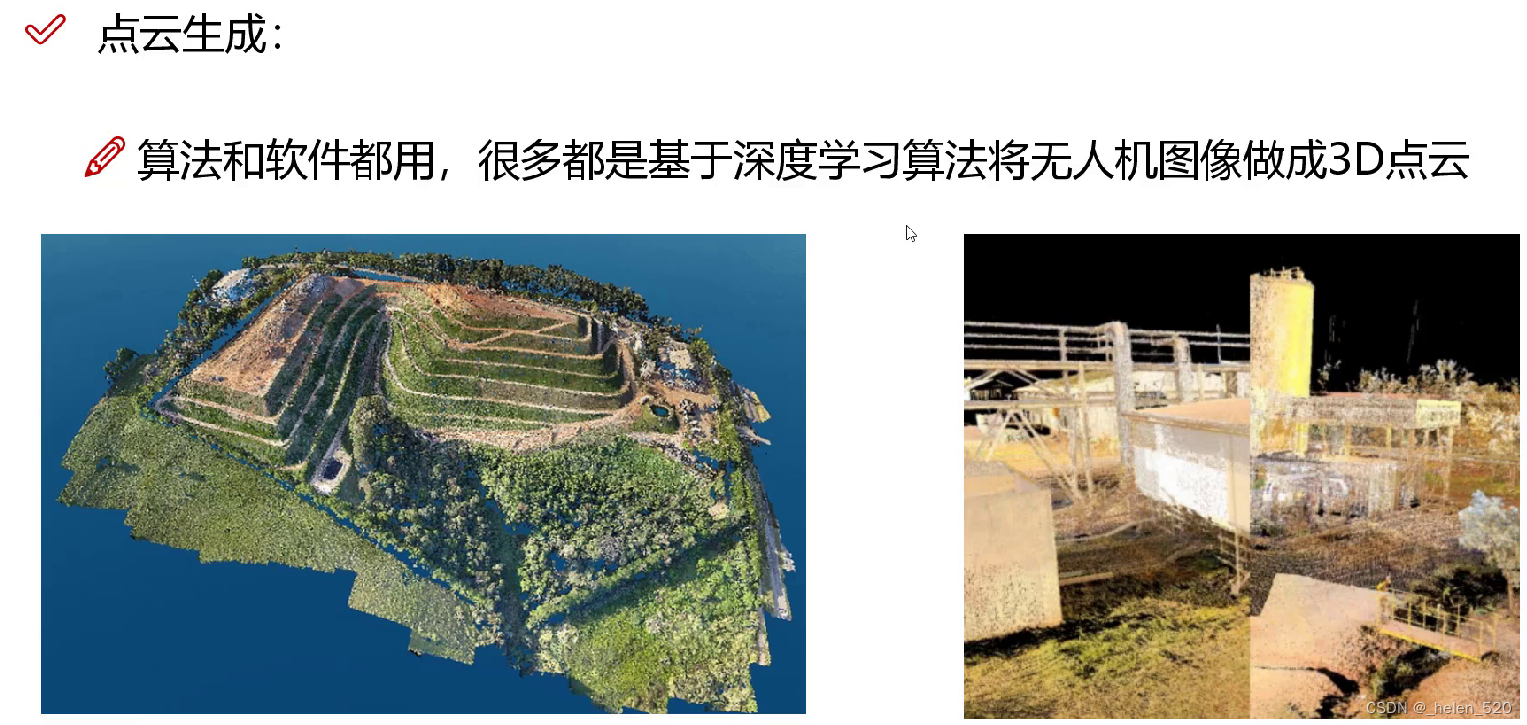
③ 点云生成:无人机图像做成3D点云。虽然有很多算法,但目前研究的人不是太多,文章也不多。——传统数据,映射成点云数据。
④ 点云物体检测:目前是研究最最热门的一个方向。分割的论文比检测多一些。
先做检测,再去做其他任务。(就像视觉里面的分类-->location YOLO)


3D检测,是一个立体的东西。是很多后续任务的前提。
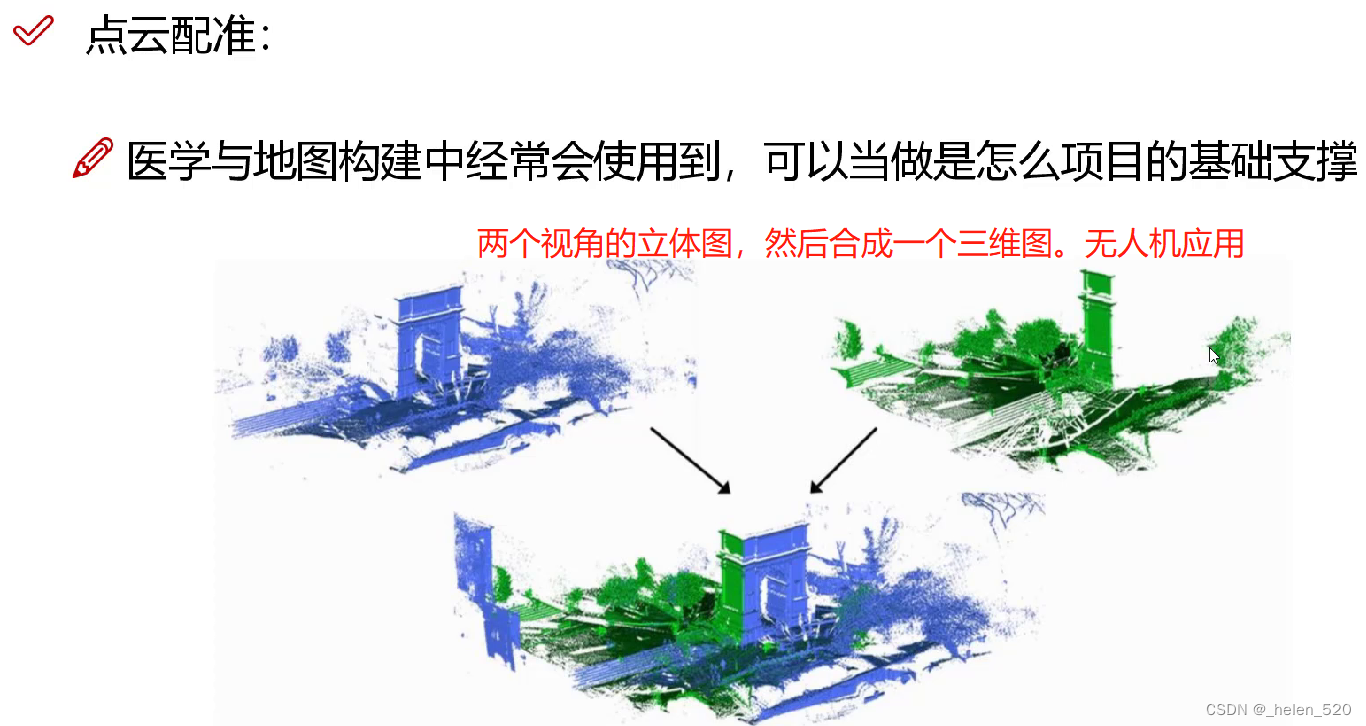
⑤ 点云配准:无人机数据,地图合成。不同角度拍到的数据,然后组合出来整体的图像。
点云配准是为了给下游任务做服务的,做基础的。比如是家具行业:室内拍摄;达芬奇手术机器人。
⑥ 点云数据特征提取概述
特征提取
我们的点如何进行特征提取,backbone是什么?——PointNet,去解决点云中的检测、分割问题。——PointNet++,做特征提取的。
- 3D数据只有坐标信息;如何将数据给转换为特征。
- 特征转换是通过backbone来进行特征提取。与图像数据有差异的。图像数据和3D点云数据差异是很大的。
- 我们的点(x,y,z)如何转换为特征? 它和其他点的关系如何考虑?这个点和全局的关系如何考虑?
- 处理点云数据中最重要的backbone是PointNet
- 点补全、分割、检测等领域,都会用到的PonitNet++这个backbone的。
3D点云中有哪些核心的网络?
⑦ 3D 数据应用领域与点云介绍
- 3D点云数据与图像数据有很大的差异:
- 感知端的传感方式与之前不一样了。属于3D方式的采集。360度旋转,扫描得到3D数据,称之为点云。
- 3D数据(点云数据)
- 3D数据应用于自动驾驶无人车、增强现实AR游戏中。
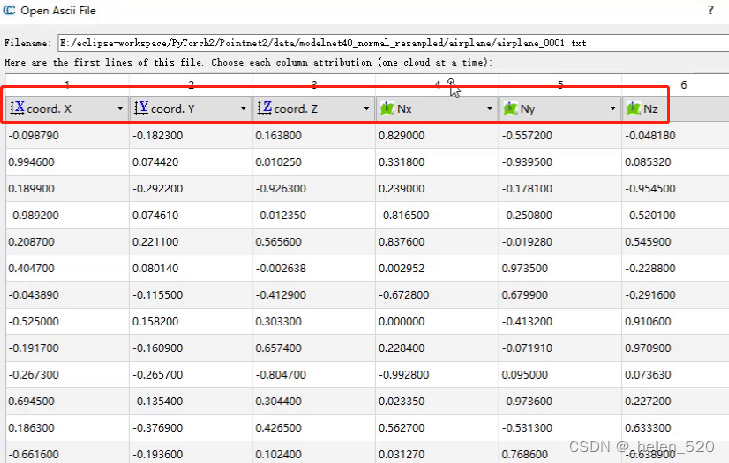
- 一个飞机样本,由如下的点组成。三维的数据(x,y,z) 共10000个点来表达一个目标。 还有三个法向量信息:Nx,Ny,Nz。

- 点云数据可视化展示:6个维度。
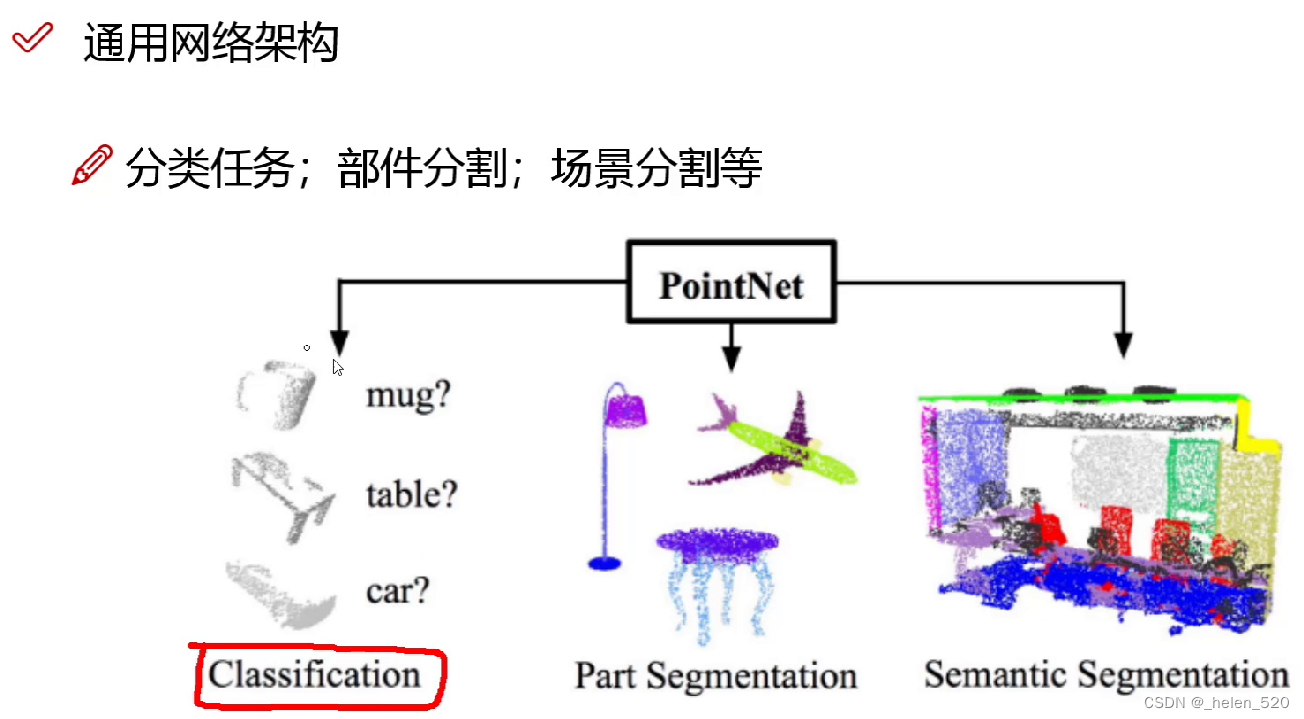
- 点云数据特性:分类、部件分割、语义分割
3D的数据有很多其他形式,为什么一定要用点云呢?——


二、PointNet算法解读
① PointNet基本出发点
算法要体现出来交换不变性! 比如max函数、求和函数,都是满足交换不变性的。跟x的次序无关。
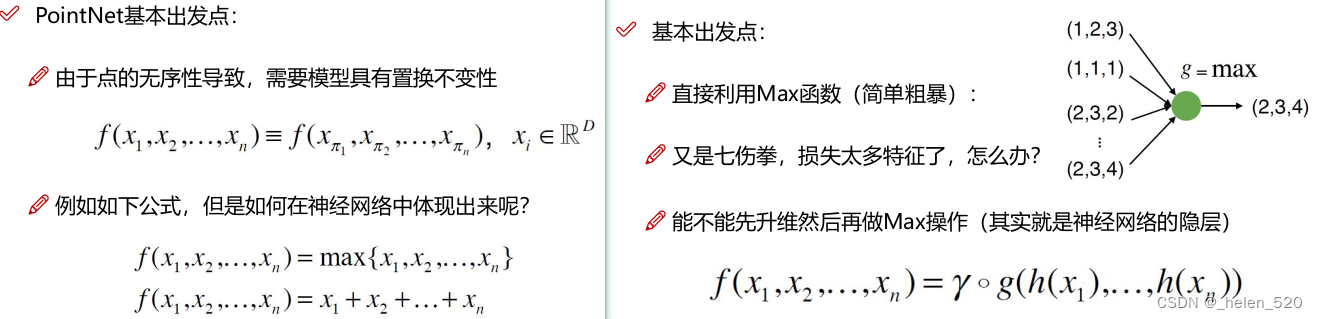
② PointNet基本模型架构和整体网络架构
三维的特征维度太少了,需要进行升维。维度提升。

③ PointNet有哪些问题呢?PointNet++网络
PointNet升级算法需要解决的问题:

最远点采样方法
分组Group方法原理解读
整体流程概述分析
分类与分割问题解决方案
遇到的问题及改进方法分析
三、PointNet++项目实战
-
相关阅读:
error: subprocess-exited-with-error完美解决webitor安装不了问题
ubuntu安装和启动redis命令步骤及其配置文件redis.conf
Android问题笔记四十五:解决SeekBar操作thumb周围产生的圆形阴影/灰色阴影/白色圆圈的解决办法
ICC2: ICG clone与ICG merge
Dijkstra求单源最短路
Lua数值 - number
python使用第三方库PyPDF2、PDFMiner或pdfplumber来解析PDF文件
hadoop 数据抽取
专业数据标注公司:景联文科技领航数据标注行业,满足大模型时代新需求
c++分层最短路(洛谷飞行路线)acwing版
- 原文地址:https://blog.csdn.net/haronchou/article/details/125998431

