-
【自校正控制】递推最小二乘法
前言
上节介绍了批处理最小二乘法,它比较适合数据的预处理,也即离线辨识,在实时性方面就不如递推最小二乘法,递推最小二乘法也就适合在线辨识
递推最小二乘法原理
递推最小二乘法的核心思想为:新的估计值 θ_hat(k) = 旧估计值 θ_hat(k - 1) + 修正项
在进行原理推导之前,我们可以先拿出批处理最小二乘法的最终公式:

将本次数据单独提出,则数据集可以记作一个新的形式:
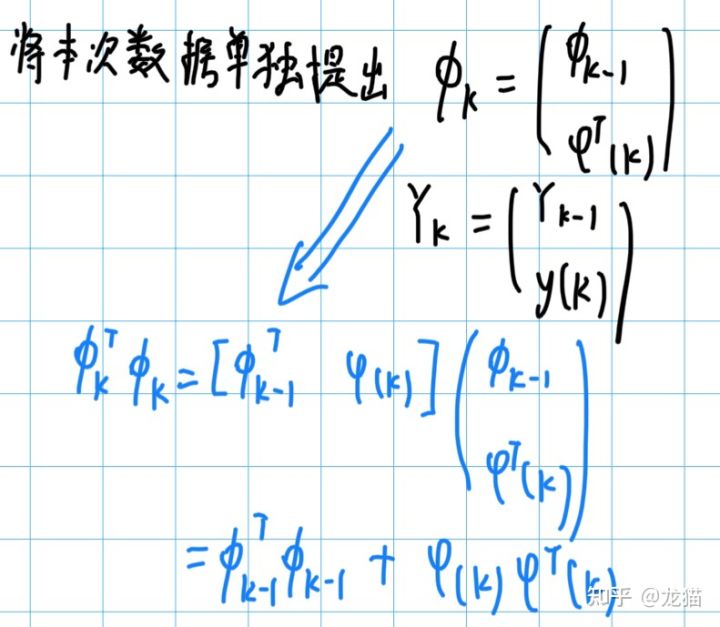
之后引入一个新的矩阵记作 P :
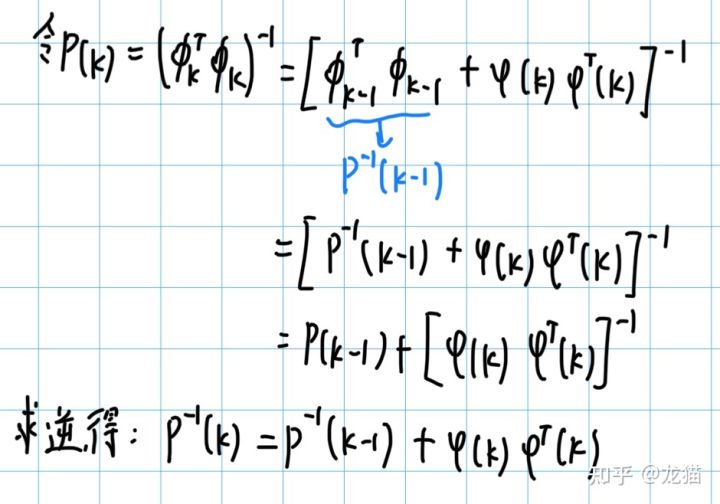
关于 P 矩阵的这几个等式都是比较重要的,后续会经常代入。
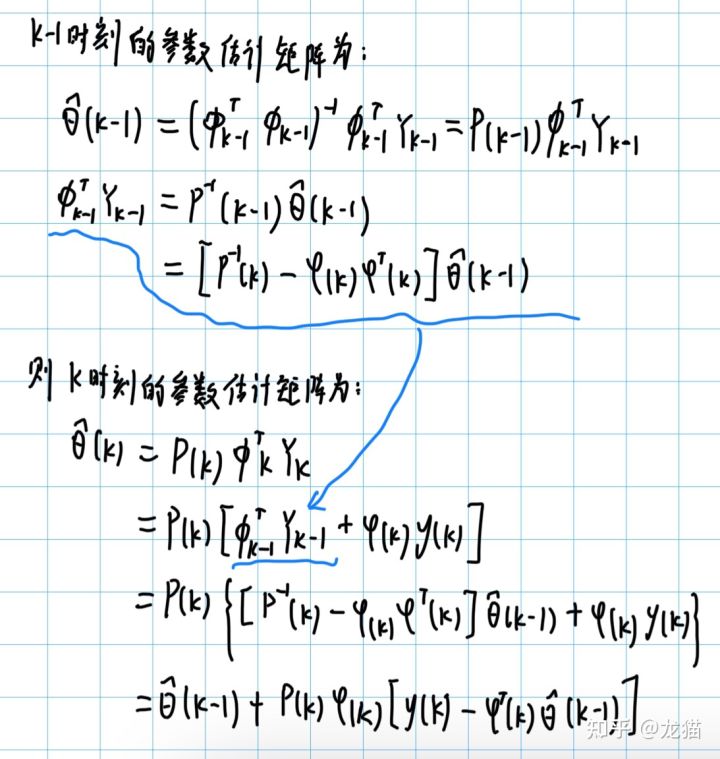
之后可以利用 P 矩阵写出上时刻的参数估计矩阵 θ_hat(k - 1) 以及 当前时刻的参数估计矩阵 θ_hat(k):
此时,再引入一个矩阵 K = P * φ:

求解这个K的递推方程需要引入一个特殊的等式,之后就可以求解出 K 矩阵与 P矩阵的递推方程:
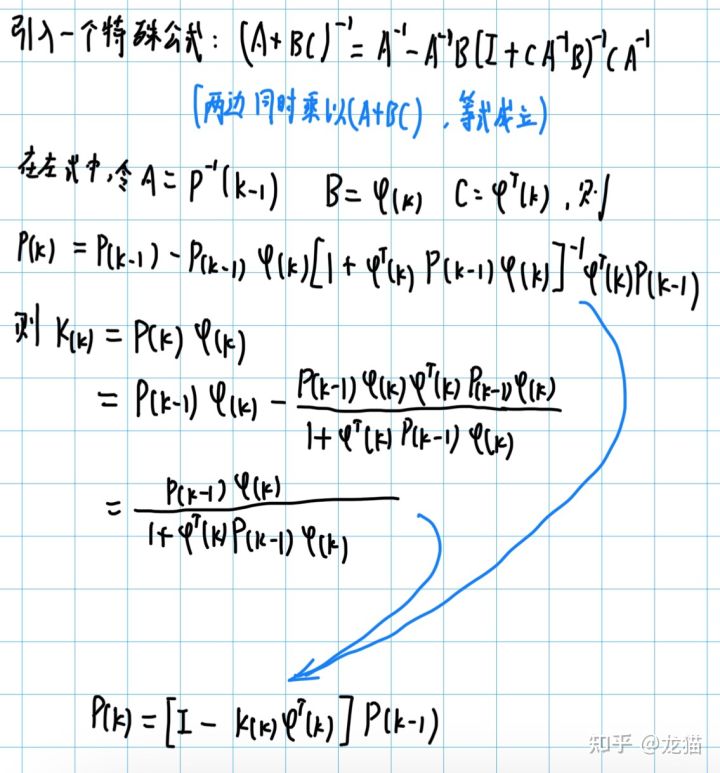
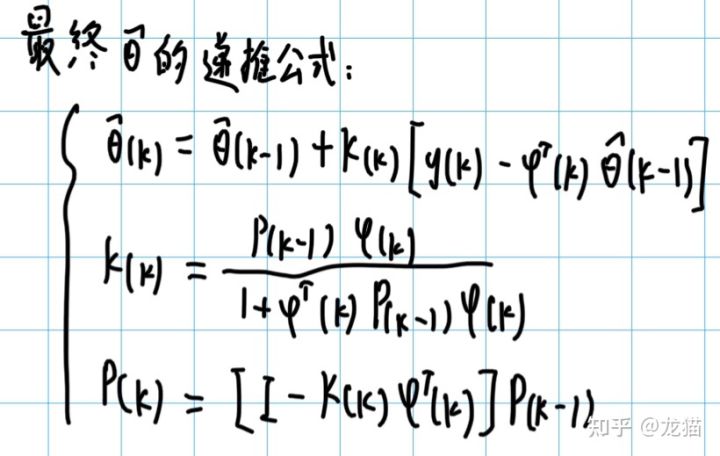
联立后,可以得出最终的递推方程:
实验
在原理推导结束后,可以使用matlab进行实验验证,同样的,像批处理最小二乘法中举的例子一样,假设有一个传递函数 G = b0 / (a0*s^2 + a1*s + a2),可以将其转化为状态空间的形式:

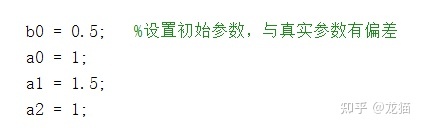
设置一下初始的参数:

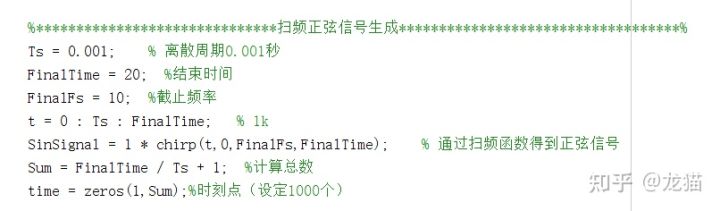
使用一个扫频信号来作为系统的输入,然后使用递推最小二乘法进行实时辨识:
需要注意的是,我们在写系统参数矩阵时,代入的为如下的参数:
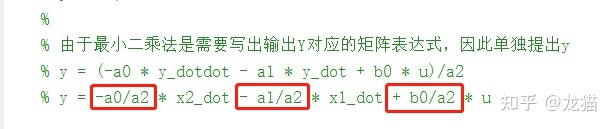
在求出估计矩阵 θ_hat(k) 后,通常我们将分母的最高次项置1,即 a0 = 1,那么其他的系数就可以求解出来了,这里我设置了一个初始系统参数值,跟原始参数还是有所区别的:
在运行程序后,得到的辨识结果为:
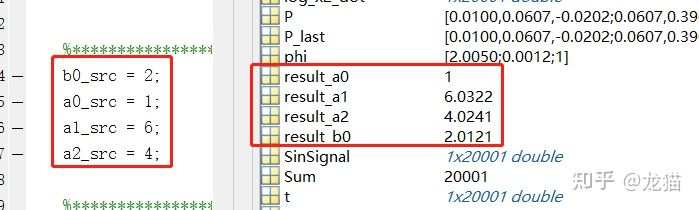
可以看到已经相差无几。
-
相关阅读:
剑指Offer面试题解总结1-10
RocketMQ知识点总结
对组合模式的理解
tomcat+idea--如何在idea上发布项目
线程相关方法
Mybatis-Plus批量插入应该怎么用
C语言日常刷题5
【Spring(三)】熟练掌握Spring的使用
Visual Studio Cpp CLR C# 替换
前端 vue 项目屏蔽右键
- 原文地址:https://blog.csdn.net/a_xiaoning/article/details/125863268